AERO-S Manual
Version 1.1
Edition 0.1/25 August 2023
Farhat Research Group (FRG)
Stanford University
AERO-S
1 INTRODUCTION
This section compiles basic information on how to prepare an input data
for a finite element analysis using the AERO-S code, and how to run this code.
The input data consists of command macros, clustered numerical data, and
comment lines. Each data cluster is preceded by a command statement.
The following rules of thumb are suggested:
| 1 | The users are allowed to have as many comment lines as they wish,
as long as the first column of each line starts with * (see COMMENTS).
|
| 2 | The subsequent data clusters may appear in any
order. The command statement preceding each cluster may be in lower,
upper, or mixed characters.
|
| 3 | The data in each cluster are free format.
|
| 4 | Only the first four letters of a command need to be specified unless otherwise noted.
|
Any segment of a AERO-S input file — for example, the data corresponding to any command macro, or a command macro
and its data, or any number of input lines — can be replaced by a statement of the form
INCLUDE filename (or "filename")
|
where filename is the name of the file containing the information. "filename" can contain a path or can be replaced by
<filename> in which case the path is that of the environment variable \$FEM\_INCLUDE. Furthermore, the included file filename can be compressed
by gzip, bzip2, or zip.
Throughout this User's Reference Manual, the *S* symbol is used to designate a command that is distributed
according to a given mesh partition when SOWER is applied to AERO-S's standard
ASCII Input Command Data file in order to decompose it into binary files for (parallel) distributed I/O
(see SOWER's User's Reference Manual). A change in the data following any command designated by
this symbol requires re-executing SOWER.
AERO-S can be executed in serial or parallel mode. However, if the requested finite element analysis requires an equation solver, AERO-S runs in parallel mode on a given parallel architecture only
if the chosen equation solver (see STATICS) can
be executed in parallel mode on that parallel architecture. In the
latter case, performing the core finite element analysis — in addition
to the solution of the system(s)
of equations — in parallel using MPI and/or OpenMP requires
partitioning the finite element mesh using the DECOMPOSE command. If on the other hand the requested finite element analysis does not require an equation
solver, AERO-S can be executed in parallel mode on either a
shared or distributed memory system as long as the finite element mesh
is partitioned using the DECOMPOSE command.
The command line for executing AERO-S in serial mode is
aeros
| [-d <decomposition_pathandfilename>] | (Specifies a decomposition file).
|
| [-v <verbose_frequency>] | (Turns on verbose and specifies frequency of printing on screen the FETI iteration count and subspace iteration count).
|
| [-c] | (Outputs contact status on screen (FETI solver)).
|
| [-t] | (Converts input file to XPost format).
|
| [-T] | (Converts input file to XPost format after removing all numbering gaps).
|
| [-m] | (Converts input file to XPost format after gathering each material in a separate element set).
|
| [-M] | (Converts input file to XPost format after removing all numbering gaps and gathering each material in a separate element set).
|
| [-P] | (Generates automatically XPost patterns for the
various XPost element sets. This option is useful only
in conjunction with the -m and -M options
which can generate multiple XPost element sets. Also,
automatically generates a global element set).
|
| <filename.aeros.aicdf> | (AERO-S ASCII Input Command Data file containing the finite element structural model and analysis commands).
|
|
The command line for executing AERO-S in parallel mode on a shared memory system using OpenMP and number_of_threads threads is
aeros -n number_of_threads
| [-d <decomposition_pathandfilename>] | (Specifies a decomposition file).
|
| [-v <verbose_frequency>] | (Turns on verbose and specifies frequency
of printing on screen the FETI iteration count
and subspace iteration count).
|
| [-c] | (Outputs contact status on screen (FETI solver)).
|
| [-t] | (Converts input file to XPost format).
|
| [-T] | (Converts input file to XPost after removing all numbering gaps).
|
| [-m] | (Converts input file to XPost format after gathering each material in a separate element set).
|
| [-M] | (Converts input file to XPost format after removing all numbering gaps and gathering each material in a separate element set).
|
| [-P] | (Generates automatically XPost patterns for the
various XPost element sets. This option is useful only
in conjunction with the -m and -M options
which can generate multiple XPost element sets. Also,
automatically generates a global element set).
|
| <filename.aeros.aicdf> | (AERO-S ASCII Input Command Data file containing the finite element
structural model and analysis commands).
|
The command line for executing AERO-S in parallel mode on a distributed system using MPI with number_of_MPI_processes MPI processes [and number_of_threads_within_an_MPI_process threads within an MPI process] is
mpirun -np number_of_MPI_processes aeros -n number_of_threads_within_an_MPI_process
| [-d <decomposition_pathandfilename>] | (Specifies a decomposition file).
|
| [-v <verbose_frequency>] | (Turns on verbose and specifies frequency
of printing on screen the FETI iteration count
and subspace iteration count).
|
| [-c] | (Outputs contact status on screen (FETI solver)).
|
| [-t] | (Converts input file to XPost format).
|
| [-T] | (Converts input file to XPost after removing all numbering gaps).
|
| [-m] | (Converts input file to XPost format after gathering each material in a separate element set).
|
| [-M] | (Converts input file to XPost format after removing all numbering gaps and gathering each material in a separate element set).
|
| [-P] | (Generates automatically XPost patterns for the
various XPost element sets. This option is useful only
in conjunction with the -m and -M options
which can generate multiple XPost element sets. Also,
automatically generates a global element set).
|
| <filename.aeros.aicdf> | (AERO-S ASCII Input Command Data file containing the finite element structural model and analysis commands).
|
2 INSTALLATION
The installation of AERO-S on a given computing system requires the availability on that system of the following tools:
C++ compiler g++ | Version 4.1.2 or higher.
|
Fortran compiler gfortran | Version 4.1.2 or higher.
|
Flex utility | Version 2.5 or higher. Flex is a lexical analyser required for building the parser of AERO-S's input command data file.
|
Bison utility | Version 2.3 or higher. Bison is a parser generator required for building the parser of AERO-S's input command data file.
|
CMake utility | Version 2.6 or higher. CMake is a cross-platform open-source build system.
It is comparable to the Unix Make program in that the build process is ultimately controlled
by configuration files (CMakeLists.txt). However unlike Make, it does not directly build the final
software but instead generates standard build files such as makefiles for Unix and projects/workspaces for Windows
Visual C++. The CMake version 2.6 utility can be obtained from http://www.cmake.org.
(Note: a “README.cmake” file discussing details on cmake options for code configuration and installation is
available in the directory containing the source code of AERO-S).
|
and following libraries:
BLAS library | BLAS is a set of Basic Linear Algebra Subprograms required by various
operations performed in AERO-S.
|
LAPACK library | LAPACK is a high-performance Linear Algebra PACKage with advanced solvers.
|
MPI library openmpi | Version 1.2.6 or higher. Open MPI is a high-performance implementation of the Message Passing Interface (MPI) required
for performing interprocessor communication, among others. More specifically, AERO-S requires an
MPI-2 implementation such as the one provided by the Open MPI project.
|
OpenMP API | Open
Multi-Processing is an Application Programming Interface (API) that
supports
multi-platform shared memory multiprocessing programming in C, C++ and
Fortran on many architectures, including Unix. As an option,
AERO-F can be compiled with OpenMP to enable multi-threaded execution.
|
In addition, the following optional libraries extend the capabilities of AERO-S:
SPOOLES library | SPOOLES is a library for solving sparse real and complex linear systems of equations
with a sparse direct solver, written in the C language using object oriented design.
|
MUMPS library | MUMPS
is a library for solving sparse real and complex linear systems of
equations with a multifrontal massively parallel sparse direct solver.
|
SUPERLU library | SUPERLU is a general purpose library for the direct solution of large sparse nonsymmetric systems on high performance machines.
|
ARPACK library | ARPACK is the Arnoldi PACKage for the solution of large-scale symmetric, nonsymmetric, and generalized eigenproblems.
|
ScaLAPACK library | ScaLAPACK
is also known as the Scalable LAPACK. This library includes a subset of
LAPACK routines redesigned for distributed memory MIMD parallel
computers.
|
BLACS library | BLACS
(Basic Linear Algebra Communication Subprograms) is a linear algebra
oriented message passing interface designed for linear algebra.
|
PARPACK library | PARPACK is the parallel version of ARPACK used by AERO-S's parallel eigensolver.
|
METIS library | METIS is a library of graph manipulation routines that can be used by AERO-S for reordering of a sparse matrix to reduce the number of fill-in entries created during
factorization.
|
Zoltan library | The Zoltan library includes among other things a suite of dynamic load-balancing and parallel partitioning tools that are used by AERO-S for parallel proximity searches.
|
Eigen3 library | Eigen3
is a versatile C++ template library for linear algebra (vectors,
matrices, and related algorithms (see http://eigen.tuxfamily.org)).
|
To install AERO-S, follow the procedure specified below:
The successful completion of the procedure described above leads to the creation in the bin/ directory of AERO-S's executable aeros.
3 ACOUSTIC TIME-DOMAIN ARTIFICIAL BOUNDARY *S*
|
Command Statement: ATDARB
|
The ATDARB command statement is used to specify the artificial boundary  on which
an Antoine absorbing condition is to be applied in the time domain, and the order of this absorbing boundary condition.
The input format is given below.
on which
an Antoine absorbing condition is to be applied in the time domain, and the order of this absorbing boundary condition.
The input format is given below.
FACE FACE_TYPE CONNECTIVITY_NODES
|
ORDER
| Order of Antoine's absorbing boundary condition in the time domain (real). Currently supported values are 0 and 1.
|
FACE
| Face (or edge in two dimensions)
identification number whose type and connectivity are to be specified
(integer). In practice, this identification number is ignored by AERO-S.
|
FACE_TYPE |
|
| 1
| 2-node line segment. To be used with two-dimensional linear elements.
|
| 2
| 3-node line segment. To be used with two-dimensional quadratic elements.
|
| 3
| 3-node triangular face. To be used with three-dimensional linear tetrahedral element.
|
| 4
| 4-node quad face. To be used with three-dimensional linear hexahedral element.
|
| 6
| 6-node triangular face. To be used with three-dimensional quadratic tetrahedral element.
|
| 10
|  -node arbitrarily higher-order quad face where -node arbitrarily higher-order quad face where  is the number of nodes on an edge of this face. To be used with element type 95. is the number of nodes on an edge of this face. To be used with element type 95.
|
| 11
| arbitrarily higher-order triangular face.
|
| 12
| arbitrarily higher-order line segment.
|
| 13
| edge of a full isoparametric triangular element where the nodes are numbered linearly along it.
|
| 14
| -node arbitrarily higher-order (spectral) quad face where is the number of nodes on an edge of this face. To be used with spectral element type 105.
|
CONNECTIVITY_NODES
| These should be listed in a stacked
fashion on a single line, and numbered clockwise (when looking from
infinity in three dimensions).
|
4 ACOUSTIC TIME-DOMAIN DIRICHLET BOUNDARY CONDITIONS *S*
|
Command Statement: ATDDIR
|
The ATDDIR command statement is used to specify nodal Dirichlet boundary conditions
for a time-domain acoustic scattering problem. The input format is given below.
NODE#
| Node number where the Dirichlet boundary condition is specified (integer).
|
VALUE
| Value of the specified boundary condition (real).
|
5 ACOUSTIC TIME-DOMAIN DISTRIBUTED NEUMANN BOUNDARY CONDITION *S*
|
Command Statement: ATDDNB
|
The ATDDNB command statement is used to specify the surface of a scatterer on which a
distributed Neumann boundary condition of the form  is applied in a time-domain acoustic computation, and the value of the constant c.
is applied in a time-domain acoustic computation, and the value of the constant c.
The input format of this command is given below.
FACE FACE_TYPE CONNECTIVITY_NODES
|
CONSTANT |
Value of the constant c (real).
|
FACE
| Face (or edge in two dimensions)
identification number whose type and connectivity are to be specified
(integer). In practice, this identification number is ignored by AERO-S.
|
FACE_TYPE |
|
| 1
| 2-node line segment. To be used with two-dimensional linear elements.
|
| 2
| 3-node line segment. To be used with two-dimensional quadratic elements.
|
| 3
| 3-node triangular face. To be used with three-dimensional linear tetrahedral element.
|
| 4
| 4-node quad face. To be used with three-dimensional linear hexahedral element.
|
| 6
| 6-node triangular face. To be used with three-dimensional quadratic tetrahedral element.
|
| 10
| -node arbitrarily higher-order quad face where is the number of nodes on an edge of this face. To be used with element type 95.^M
|
| 11
| arbitrarily higher-order triangular face.
|
| 12
| arbitrarily higher-order line segment.
|
| 13
| edge of a full isoparametric triangular element where the nodes are numbered linearly along it.
|
| 14
| -node arbitrarily higher-order (spectral) quad face where is the number of nodes on an edge of this face. To be used with spectral element type 105.
|
CONNECTIVITY_NODES
| These should be listed in a stacked fashion on a single line, and numbered clockwise (when looking from infinity in three
dimensions).
|
6 ACOUSTIC TIME-DOMAIN NEUMANN BOUNDARY CONDITIONS *S*
|
Command Statement: ATDNEU
|
The ATDNEU command statement is used to specify the nodal Neumann boundary conditions
for a time-domain acoustic scattering problem. The input format is given below.
NODE#
| Node number where the Neumann boundary condition is specified (integer).
|
VALUE
| Value of the specified boundary condition (real).
|
7 ACOUSTIC TIME-DOMAIN ROBIN DISTRIBUTED BOUNDARY CONDITION *S*
|
Command Statement: ATDROB
|
The ATDROB command statement can be used to specify the surface of a scatterer on which a
distributed Robin boundary condition of the form  is applied in a time-domain acoustic
computation, and the three constants
is applied in a time-domain acoustic
computation, and the three constants  ,
,  , and
, and  .
.
The input format of this command is given below.
FACE FACE_TYPE CONNECTIVITY_NODES
|
|
| Non-zero constant premultiplying the normal derivative of the Robin boundary condition (real).
|
|
| Constant premultiplying the unknown of the Robin boundary condition (float).
|
|
| Constant right hand-side of the Robin boundary condition (float).
|
FACE
| Face (or edge in two dimensions)
identification number whose type and connectivity are to be specified
(integer). In practice, this identification number is ignored by AERO-S.
|
FACE_TYPE |
|
| 1
| 2-node line segment. To be used with two-dimensional linear elements.
|
| 2
| 3-node line segment. To be used with two-dimensional quadratic elements.
|
| 3
| 3-node triangular face. To be used with three-dimensional linear tetrahedral element.
|
| 4
| 4-node quad face. To be used with three-dimensional linear hexahedral element.
|
| 6
| 6-node triangular face. To be used with three-dimensional quadratic tetrahedral element.
|
| 10
| -node arbitrarily higher-order quad face where is the number of nodes on an edge of this face. To be used with element type 95.^M
|
| 11
| arbitrarily higher-order triangular face.
|
| 12
| arbitrarily higher-order line segment.
|
| 13
| edge of a full isoparametric triangular element where the nodes are numbered linearly along it.
|
| 14
| -node arbitrarily higher-order (spectral) quad face where is the number of nodes on an edge of this face. To be used with spectral element type 105.
|
CONNECTIVITY_NODES
| These should be listed in a
stacked fashion on a single line, and numbered clockwise (when looking
from infinity in three dimensions).
|
8 ACTUATORS *S*
|
Command Statement: ACTUATORS
|
The ACTUATORS command is used to prescribe at specified nodes and local degrees of freedom a time-variant source term
(for example, a force field for a structural model) using a user-defined subroutine, and request the solution
state at that node (for example, the displacement, velocity, and acceleration fields for a structural model). In this case,
the user has to write his/her own algorithm for specifying the prescribed source term within a subroutine named "control.C".
The SENSORS command must be used to pass to "control.C" the solution state at the nodes of interest (see SENSORS).
The user should grab the special makefile for this command which is located within the AERO-S.d/Control.d directory,
and use the LOAD command to activate this command.
For structural models, all prescribed forces and moments are interpreted by default as being of the axial type — that is,
as being defined in the fixed nodal degree of freedom reference frames (see NODES and NFRAMES).
However, if a node has rotational degrees of freedom, the user can
specify that the forces and/or moments prescribed at this node
are of the follower type — that is, they act in a direction that remains constant in the local frame attached to the node
where they are applied. This local frame coincides with the nodal degree of freedom reference frame
(see NODES and NFRAMES) in the undeformed configuration. In the deformed configuration, the orientation of
this local frame is defined by the rotation of the node to which it is attached. In other words, the specified
nodal force or moment "follows" in this case the rotation of the node to which it is applied.
An example input file using this command can be found in APPENDIX 1.
Note 1: By default, the nodal degree of freedom reference frames are the same as the global reference frame.
Note 2: For structural models, specifying a follower force or moment leads to an unsymmetric tangent "load" stiffness
matrix during a NONLINEAR analysis.
The syntax for invoking this option is given below.
NODE#
| Node number where an actuating force/moment is specified (integer).
|
DOF#
| Degree of freedom local number where an actuating force/moment is specified (integer).
|
TYPE
| For structural models, all specified nodal source terms are by default of the axial type. However, if this parameter
is set to FOLLOWER and the node NODE# has rotational degrees of freedom, the source term specified
at this node and degree of freedom DOF# is considered to be of the follower type (characters).
|
9 AEROELASTICITY
The AERO command statement can be used to perform any of the following instructions:
- Request that AERO-S sends to AERO-F one or several displacement fields of the structure.
- Indicate that AERO-S is to interact with AERO-F to compute a flow-induced
load and perform the corresponding static structural analysis, or perform a coupled static or dynamic aeroelastic simulation.
- Choose a staggered time-integration algorithm (ALGORITHM subcommand) and, if needed, a displacement predictor
(ALGORITHM subcommand) defined by two coefficients  and
and  and the formula
and the formula
 when the structural time-integrator is implicit, with
when the structural time-integrator is implicit, with  if
if A6 is the chosen time-integration algorithm and
 otherwise, or
otherwise, or

when the structural time-integrator is explicit, to perform a static or dynamic aeroelastic simulation.
Here,  (
(  ) is the predicted displacement field at time-step
) is the predicted displacement field at time-step  (
(  ) and
) and  is the structural time-step size (or simply,
time-step) resulting from some settings of the DYNAMICS command.
It is relevant however only for dynamic simulations.
is the structural time-step size (or simply,
time-step) resulting from some settings of the DYNAMICS command.
It is relevant however only for dynamic simulations.
- Select an algorithm for computing the corrected pressure field  to be used in computing the aerodynamic forces acting
on the structure at time-step (
to be used in computing the aerodynamic forces acting
on the structure at time-step (PRESSURE subcommand) of a dynamic aeroelastic simulation.
- Specify the structure matcher file, when either the Arbitrary
Lagrangian/Eulerian (ALE) framework is chosen for performing a coupled
dynamic or static fluid-structure
simulation without element deletion, or the Embedded Boundary
Method (EBM) framework is used for this purpose and the embedded surface
is inputted to the flow solver AERO-F.
Note that the ALE fraework does not support element deletion, and the
EBM framework supports it only if the embedded discrete surface is
identical to the wet surface of the finite element structural model
and inputted under this command.
- Specify the discrete surface to be embedded in the fluid grid, when
the EBM framework is chosen for performing a coupled dynamic or static
fluid-structure
simulation with or without element deletion, if this surface is
identical to the wet surface of the finite element structural model and
defined using the same nodes of this model. Otherwise, provided
that the simulation is to be performed without element deletion, the
discrete surface to be embedded in the fluid grid should be inputted to AERO-F and the structure matcher file should be
specified under this command.
The purpose of the displacement predictor and that of the force
corrector are to compensate for the effects of time-lagging. More
specifically,
they improve the time-accuracy and numerical stability of the chosen
staggered solution algorithm by minimizing the lack of energy
conservation at the fluid-structure
interface. The theoretical, algorithmic, and practical aspects of both
of these “compensators” are described in
S. Piperno and C. Farhat, “Partitioned Procedures for the Transient Solution of Coupled Aeroelastic Problems - Part II:
Energy Transfer Analysis and Three-Dimensional Applications,” Computer Methods in Applied Mechanics and Engineering, Vol. 190,
pp. 3147-3170 (2001)
Before setting the values of and that complete the definition of the displacement predictor and choosing the force corrector,
the user should note that:
- Currently, the fluid code AERO-F can send to AERO-S at either the pressure field at
,
 , or the averaged pressure field
, or the averaged pressure field  .
Hence, can be set at least to either of these two values. Therefore, the purpose of the
.
Hence, can be set at least to either of these two values. Therefore, the purpose of the PRESSURE subcommand is to propose
additional choices for the corrected pressure field
. These can affect the order of time-accuracy of the chosen staggered
solution algorithm (see C. Farhat, G. van der Zee and P. Geuzaine,
“Provably Second-Order Time-Accurate Loosely-Coupled Solution Algorithms
for Transient
Nonlinear Computational Aeroelasticity,” Computer Methods in Applied
Mechanics and Engineering, Vol. 195, pp. 1973-2001 (2006)).
- The values of and
that minimize the variation of energy exchanged at the
fluid-structure interface
and therefore improve time-accuracy and numerical stability of the
chosen staggered solution algorithm depend on the chosen fluid and
structure
time-integrators, the chosen force corrector, and the selected staggered
solution algorithm itself.
- When the Generalized method is used for time-integrating linear or nonlinear structural dynamics problems (see DYNAMICS), AERO-S solves the following equilibrium problem

- When the central difference method is used for time-integrating structural dynamics problems (see DYNAMICS), AERO-S solves the following equilibrium problem

Note 1: AERO-F offers two different computational frameworks for fluid-structure interaction: an ALE
framework, and an EBM framework. When a functional capability described below is meaningful, applicable, or supported
by only one of these two computational frameworks, its designating keyword is followed by [ALE]
in the case of the ALE computational framework, and by [EMB] in the case of EBM computational framework. When
this capability is applicable, meaningful, and supported by both computational frameworks, its designating keyword is not
followed by any symbol.
Note 2: The algorithms PP and MPP require the additional presence of DYNAMICS in the input file.
Note 3: The algorithm B0 requires the additional presence of QSTATICS in the input file. In this case,
Problem.Type in AERO-F should be set to SteadyAeroelastic.
Note 4: For a static aeroelastic analysis, A0, A4, A5, A6, B0 and C0 are irrelevant as
QSTATICS, which is also needed in this case, is equipped with its own staggered solution algorithm. However, for parsing
reasons, one of these staggered solution algorithms must be explicitly specified even if it will be ignored.
Note 5: The values of and derived in the paper by Piperno and Farhat mentioned above correspond to
the case where the structure is linear and time-integrated by the Newmark algorithm with  and
and  .
For other structural time-integrator choices, that analysis needs to be redone for choosing the parameters of the command
.
For other structural time-integrator choices, that analysis needs to be redone for choosing the parameters of the command AERO.
Note 6: If an aeroelastic analysis is requested with all of the GEPS, IDISP6, and IDISPLACEMENTS commands present in the input file, AERO-S interprets
the IDISPLACEMENTS command and its content as the initialization of the incremental displacement field from the configuration  (see GEPS) to the configuration
(see GEPS) to the configuration  (see GEPS).
In this case, it sends to the fluid code at each time-step the sum of
the updated incremental displacement and the displacement inputted under
the IDISP6 command. Hence, this scenario is particularly suitable
for the case where the fluid code is started from a deformed CFD mesh. If on the other hand an aeroelastic analysis is requested
with only the
(see GEPS).
In this case, it sends to the fluid code at each time-step the sum of
the updated incremental displacement and the displacement inputted under
the IDISP6 command. Hence, this scenario is particularly suitable
for the case where the fluid code is started from a deformed CFD mesh. If on the other hand an aeroelastic analysis is requested
with only the GEPS and IDISP6 commands present in the input file, AERO-S
understands that the incremental displacement field is initialized to
zero. However, it communicates
in this case with the fluid code in a very special manner: at the first
time-step, it sends to the fluid code the initial value of the
incremental displacement field (which in this case is zero),
and at each subsequent time-step, the sum of the updated incremental
displacement and the displacement specified under the IDISP6 command. Hence, the latter scenario is particularly suitable
for the case where the fluid code is started from an undeformed CFD mesh.
The syntax for invoking this command is given below.
ALGORITHM | |
| SUBCYCLING | n_subcycles |
| PRESSURE | |
| MATCHER | pathandfilename |
| EMBEDDED | embeddedsurfaceid |
|
|
ALGORITHM |
|
PP [ALE]
| This “Ping-Pong” algorithm sends the initial displacement of the structure, specified under either the IDISP6
command or the IDISPLACEMENTS (possibly equipped with the sub-command MODAL), to the fluid code which receives
it and deforms the CFD mesh accordingly (characters). For this purpose, the DYNAMICS command must also be present in
the AERO-S input file. After the send occurs, the structure code exits gracefully, the fluid code computes the
fluid mesh deformation associated with the specified structural displacement and outputs (if requested) the corresponding
position and/or displacement of the fluid mesh (characters).
|
MPP
| This “Multi-Ping-Pong” algorithm sends several initial displacements of the structure at a time — for example, modal
displacements — to the fluid code, which uses them to compute compatible fluid mesh deformations. The READMODE
command
must be used to input the initial displacements of interest — for
example, a set of eigenmodes. If the second format of that
command is used to specify the Reduced-Order Basis (ROB) to be
used to generate the initial displacements, the coefficient
of this command must be used to identify that ROB (see the field rob_idi in READMODE).
If a coefficient is specified after MPP, the initial displacements are amplified by before they are sent to the
fluid code. However, the fluid code scales back by  the corresponding fluid mesh displacements it computes before
saving them in an output file, in order to preserve the effect of
the mass normalization of the modal structural
displacements. The deformed fluid mesh configurations can then be
used to generate sources of excitations for the
construction of fluid POD bases and ROMs, or for linearized
(perturbation) flow simulations whose initial conditions involve
a (modal) position or velocity of the fluid surface mesh.
the corresponding fluid mesh displacements it computes before
saving them in an output file, in order to preserve the effect of
the mass normalization of the modal structural
displacements. The deformed fluid mesh configurations can then be
used to generate sources of excitations for the
construction of fluid POD bases and ROMs, or for linearized
(perturbation) flow simulations whose initial conditions involve
a (modal) position or velocity of the fluid surface mesh.
As for the “Ping-Pong” case, the DYNAMICS command
must also be present in the AERO-S input file, AERO-S exits gracefully after the send occurs,
the fluid code computes the fluid mesh deformation associated with the specified structural displacements and outputs
(if requested) the corresponding positions and/or displacements of the fluid mesh. In addition, for each inputted deformed
fluid mesh position, the fluid code outputs an identification tag — for example, the frequency of the corresponding input
structural mode in the case of modal displacements (characters).
|
A0
| This is the basic sequential staggered solution algorithm (characters). When fluid subcycling is effected, the same algorithm
has been referred to in the AIAA Paper 96-1388 by Farhat and co-workers as the A1
algorithm (characters).
It should not be used without a displacement predictor as it would
reduce the overall order of time-accuracy compared to that
intrinsic to the structural time-integrator. For the same reason,
it is also not recommended — and as a matter of fact not
available — when the structural time-integrator is explicit.
|
A4
| This is the basic staggered solution algorithm with fluid-structure inter-parallelism (characters). It has been referred to
as A2 in the AIAA Paper 96-1388 by Farhat and co-workers. When this algorithm is specified, AERO-F sends
to AERO-S  or or  rather than the corresponding pressure fields at .
Currently, this algorithm is not available when an explicit structural time-integrator is chosen. rather than the corresponding pressure fields at .
Currently, this algorithm is not available when an explicit structural time-integrator is chosen.
|
A5
| This staggered solution algorithm also features inter-parallelism but offers a better accuracy than A4
when both
methods are used without a displacement predictor (characters).
Currently, this algorithm is not available when an explicit
structural time-integrator is chosen.
|
A6
| This staggered solution
algorithm has superior stability and accuracy properties. It is
recommended when the fluid is
time-advanced by an implicit time-integrator. It has been referred
to in most papers by Farhat and co-workers as the ISS
(Improved Serial Staggered algorithm) method (characters). It
delivers good accuracy without any displacement predictor. However,
it is provably second-order time-accurate when equipped with the
the displacement predictor defined by  and and  ,
the midpoint implementation of the Newmark time-integrator with ,
the midpoint implementation of the Newmark time-integrator with  and and  (see DYNAMICS),
and a second-order time-integrator for the discrete fluid problem. Also, this partitioned solution procedure prefers a non
time-averaged pressure field. Most importantly, it was designed to be used exclusively with the (see DYNAMICS),
and a second-order time-integrator for the discrete fluid problem. Also, this partitioned solution procedure prefers a non
time-averaged pressure field. Most importantly, it was designed to be used exclusively with the NONCOLLOCATED scheme of aerodynamic
force evaluation (see below) (characters). Currently, it does not support an explicit structural time-integrator.
|
B0
| This one-way coupled
steady-state aeroelastic algorithm sends the initial displacement of the
structure (if any) to the flow solver. After receiving it and updating
its mesh, AERO-F performs any requested flow simulation and sends to AERO-S upon completion the
flow-induced load. Then, AERO-S receives this load, performs a static analysis if requested, and finally outputs
any requested data (such as the computed flow-induced load, and/or resulting displacement, stress, and strain fields).
|
C0
| This staggered solution algorithm is designed for the case where the structural subsystem is time-integrated by
the explicit central difference method (see DYNAMICS),
and the fluid subsystem is time-integrated by either an
explicit or an implicit scheme. As shown in C. Farhat, A. Rallu,
K. Wang and T. Belytschko, “Robust and Provably
Second-Order Explicit-Explicit and Implicit-Explicit Staggered
Time-Integrators for Highly Nonlinear Fluid-Structure Interaction
Problems,” International Journal for Numerical Methods in
Engineering, (2010), it is genuinely second-order time-accurate
when equipped with the second-order displacement predictor
obtained by setting  and and  (see below), and a second (or higher)-order accurate explicit or
implicit ALE fluid time-integrator. Currently, this algorithm
supports only explicit structural time-integrators, and is the
only algorithm which supports element deletion in fluid-structure
simulations.
(see below), and a second (or higher)-order accurate explicit or
implicit ALE fluid time-integrator. Currently, this algorithm
supports only explicit structural time-integrators, and is the
only algorithm which supports element deletion in fluid-structure
simulations.
|
| When used with the MPP command, this coefficient can be specified to amplify the initial displacements to be sent
to the fluid code (however, as noted above, the fluid mesh displacements computed by the fluid code are scaled back by
before they are saved in an output file). In this case, the default value is 1. Otherwise, this coefficient
is part of the construction of a predictor for the position of the structure. For  (and (and  ), no prediction is effected.
Setting ), no prediction is effected.
Setting  (and ) generates a first-order prediction, and setting (and (and ) generates a first-order prediction, and setting (and  generates
a second-order prediction. The optimal values of and
depend on the specifics of the fluid and structure field
time-integrators (see the aforementioned paper on interface energy
conservation by Piperno and Farhat) (real). In this case, the default
value is 0.5
for algorithm generates
a second-order prediction. The optimal values of and
depend on the specifics of the fluid and structure field
time-integrators (see the aforementioned paper on interface energy
conservation by Piperno and Farhat) (real). In this case, the default
value is 0.5
for algorithm C0, and 0 for all other algorithms.
|
| When used with the MPP command, this coefficient is interepreted as an integer that identifies among the reduced-order bases read using the READMODE command (see there the
field rob_idi) that to be used with the algorithm MPP
(integer). Otherwise, this coefficient is interpreted as a real
coefficient that is part of the construction of a predictor
for the position of the structure (real) and therefore should be
used only as such (see above). In this case, its default value is  for algorithm for algorithm C0, and 0 for all other algorithms.
|
SUBCYCLING n_subcycles | This
pair of sub-command keyword (characters) and corresponding numerical
value (integer) specifies the structural subcycling factor, which
defines the coupling fluid-structure time-step size (or simply, time-step)  – that is, the time-interval during which structural and fluid
computations are performed without
any coupling, or equivalently, the time-interval between two
couplings of the fluid and structural sub-systems – as follows
– that is, the time-interval during which structural and fluid
computations are performed without
any coupling, or equivalently, the time-interval between two
couplings of the fluid and structural sub-systems – as follows

where is the structural time-step resulting from some settings of the DYNAMICS command. Hence, n_subcycles can also be described as the number of time-steps that the
structural analyzer performs per coupling fluid-structure time-step. The default value is 1.
|
PRESSURE |
This option, which can take either value COLLOCATED or NONCOLLOCAED, specifies how to compute the
corrected pressure field. It is relevant only when ALGORITHM is set to A0, A4, A5, or A6.
|
COLLOCATED
| In this case, is set to the received pressure field (or  ), then converted to ), then converted to  before the aerodynamic forces are constructed and fed into the
structural equations of dynamic equilibrium (see the introduction to
this command). Therefore, this option covers the cases
before the aerodynamic forces are constructed and fed into the
structural equations of dynamic equilibrium (see the introduction to
this command). Therefore, this option covers the cases  and and  , which explains the origin of the word “collocated” (characters). , which explains the origin of the word “collocated” (characters).
|
NONCOLLOCATED
| In this case, which is also the default value of PRESSURE, the pressure field is set
to  (or (or  ), then converted to (here, is the parameter of the Generalized method). This specific choice for is consistent with the quadrature rule of the Generalized method for evaluating the work done by an external force in the time-interval ), then converted to (here, is the parameter of the Generalized method). This specific choice for is consistent with the quadrature rule of the Generalized method for evaluating the work done by an external force in the time-interval  . In other words, the pressure forces fed into the structural equations of equilibrium are based on . In other words, the pressure forces fed into the structural equations of equilibrium are based on  . For . For  , ,  , which explains the origin of the word “non collocated” (characters). , which explains the origin of the word “non collocated” (characters).
|
MATCHER |
|
pathandfilename
| Name (including path, if needed)
of the structural matcher file (characters). This file should be
specified because the fluid-structure computation is to be performed
without element deletion, using either the ALE or
EBM framework. In the first case, the structural mesh should be
matched with the fluid mesh. In the second case, it should be matched
with the embedded discrete surface and this surface should be inputted
to
AERO-F.
|
EMBEDDED [EMB] |
|
embeddedsurfaceid
| Integer identification number of a surface defined in SURFACETOPO
using 3-noded triangles, 4-noded quadrilaterals, or a combination of
such elements (integer). This parameter should be specified when the
discrete
surface to be embedded in the fluid mesh for the purpose of a
fluid-structure computation (with or without element deletion) is
identical to the wet surface of the finite element structural model and
defined using the same
nodes of this model. In this case, it is not necessary to specify
above a structure matcher file.
|
10 AEROHEAT
The AEROH command statement is used to indicate that AERO-S is to interact with AERO-F
to perform an aerothermal (thermostructure-thermofluid) coupled simulation, to select a staggered time-integration algorithm
(ALGORITHM subcommand), and specify the and parameters of the following
prediction of the temperature of the structure at time-step (ALGORITHM subcommand)

Note 1: Currently, the AEROH command supports only linear thermal analysis on the AERO-S side.
Note 2: The staggered solution algorithm A0 discussed below for aerothermal analysis requires the additional presence
in the input file containing this command statement of the DYNAMICS command in the dynamic case, or the QSTATICS
command in the static case.
Note 3: For a static aerothermal analysis, the staggered solution algorithm A0 must be specified only for parsing
reasons, as QSTATICS has its own staggered (iterative) solution scheme.
The syntax for invoking this command is given below.
|
ALGORITHM
|
11 ATTRIBUTES *S*
|
Command Statement: ATTRIBUTES
|
The ATTRIBUTES command statement is used to label an
element with an attribute identification number for linear elastic
material
and/or geometric properties, a composite or orthotropic shell, or
anisotropic solid element attribute identification number,
a frame or fiber-angle attribute identification number if this element
has been defined as a composite or orthotropic shell or anisotropic
solid element,
and a hyper reduction coefficient when the mesh containing this element
is sampled for the purpose of hyper reduction.
The attribute identification number for linear elastic material
properties and/or geometric properties is required for all elements
of the computational model. It is used in the MATERIAL command when specifying the linear elastic material properties
and/or geometric properties of a group of elements (see MATERIAL).
An “empty” (or “phantom”) element — that is, an element with zero generalized stiffness and mass matrices — can be useful
in aeroelastic and aerothermal computations to facilitate the exchange of elastodynamic, thermal, and aerodynamic
data between the fluid, thermal, and structural analyzers. Such an element can be specified by assigning it a negative
attribute number. In this case, it is not necessary to specify a material for such an element as its properties will be ignored.
It is also not necessary to assign an attribute number to a massless rigid element or simple joint element (types 118–125 and
127) for which the default constraint method (see CONSTRAINTS) is to be used for enforcing the associated constraints.
On the other hand, an attribute number should always be assigned to a rigid element which has a mass (see MATERIAL),
and a revolute-joint-with-joint-driver element (type 126) or a joint spring combination element (types 220–227), regardless of
whether the default constraint method is to be used or not for this element.
The hyper reduction coefficients are computed by the RMSHC command and outputted in the result file SAMPLMSH (see OUTPUT)
which includes the header ATTRIBUTES. Hence, this file can be simply included in the AERO-S input file using the
INCLUDE command (see INTRODUCTION) for the purpose of hyper reduction. An alternative approach for this purpose that leads
to faster CPU performance is to use the reduced mesh generated by the command RMSHC and outputted in the file SAMPLMSH.elementmesh.inc
(see OUTPUT).
AERO-S supports three input formats for this command that are described below.
In the case of the first format, there should be as many lines as the number of finite elements. All formats can be mixed.
Note 1: This command is required in any AERO-S ASCII Input Command Data file.
Note 2: Only the following element types can be used as “empty”
(or “phantom”) elements and therefore can be assigned negative attribute
numbers:
types 6 and 7 (beam elements); types 8, 88, 15, 1515, 16, 20, and 2020
(shell elements); types 19, 87, 128, and 129 (membrane elements); and
types 46 and 49 (thermal elements).
Note 3: When phantom elements are used in the mesh, the FETI solvers
are not guaranteed to work because of issues related to subdomain singularities.
Hence, it is not recommended to use FETI solvers in such cases.
Note 4: Phantom elements should be used with care to avoid the
generation of degrees of freedom without stiffness (and mass) and
therefore avoid introducing artificial singularities in the solution of
the problem of interest. In particular, it is strongly recommended to
ensure that every
node of every phantom element is also a node of a non-phantom element,
and that every local degree of freedom of a phantom element is also a
local degree
of freedom of a non-phantom element. In other words, it is strongly
recommended, for example, to avoid connecting a phantom shell element to
a face of a solid (brick element) and use instead
a phantom three-dimensional plane stress/plane strain element in this
case.
Note 5: Only phantom shell elements and phantom plane stress/plane strain elements can transfer aeroelastic loads to a structure.
Note 6: If an element is attributed two different material laws using the MATUSAGE/MATLAW and
ATTRIBUTES/MATERIAL commands, the material law defined in MATLAW and assigned in MATUSAGE takes precedence.
ELEMENT# MAT_ATT# CMP_ATT# CMP_FRM# HRC HRCOEFF [EXTFOL]
|
or
ELEMENT# MAT_ATT# CMP_ATT# THETA  HRC HRCOEFF [EXTFOL]
|
or
STARTING_ELEMENT# ENDING_ELEMENT# MAT_ATT# CMP_ATT# CMP_FRM#
|
or
STARTING_ELEMENT# ENDING_ELEMENT# MAT_ATT# CMP_ATT# THETA
|
or
STARTING_ELEMENT# ENDING_ELEMENT# IDENTITY
|
or
ELEMENT# HRC HRCCOEFF [EXTFOL]
|
ELEMENT#
| Element number whose attribute numbers are to be specified (integer).
|
MAT_ATT#
| Group identification number (integer); AERO-S supports gaps in numbering. Identifies material properties.
|
CMP_ATT#
| Composite (orthotropic or anisotropic) identification number (integer); AERO-S
supports gaps in numbering. Identifies composite (orthotropic or
anisotropic) properties.
May be left blank if element is not a composite (orthotropic or
anisotropic) element and must be set to -1 if the orthotropic and/or
anisotropic material properties of element are
specified using the command MATLAW instead of the command COMPOSITE.
|
CMP_FRM#
| Composite frame identification number (integer); AERO-S supports gaps in numbering. May be left blank if element is not a composite (orthotropic or
anisotropic) element.
|
THETA
| Keyword that must be spelled as THETA (characters). This keyword announces that the next item on the same
input line is the value of THETA. This unusual AERO-S input is necessary to avoid
parsing conflicts.
|
|
Reference angle in degrees between the axis defined by local
nodes 1 and 2 of the element, and the material local x-axis
defining the direction of the  and and  of the constitutive law (real).
When also using the of the constitutive law (real).
When also using the LAYN and LAYC commands, the material x-axis corresponds to the direction of  when when
 is zero. If this angle rather than is zero. If this angle rather than CMP_FRM# is specified, the composite frame is internally generated by AERO-S.
|
STARTING_ELEMENT#
| First element of a sequence of elements that have the same MAT_ATT#, CMP_ATT#, and CMP_FRM# (integer).
|
ENDING_ELEMENT#
| Last element of a sequence of elements that have the same MAT_ATT#, CMP_ATT#, and CMP_FRM# (integer).
|
MAT_ATT#
| Group identification number. Identifies material properties (integer).
|
CMP_ATT#
| Composite identification number (integer). Identifies composite (orthotropic or anisotropic) properties.
May be left blank if element is not a composite (orthotropic or anisotropic) element.
|
CMP_FRM#
| Composite frame identification number (integer).
May be left blank if element is not a composite (orthotropic or anisotropic) element.
|
IDENTITY
| This keyword signals to the AERO-S code that each element in the range delimited
by STARTING_ELEMENT# and ENDING_ELEMENT# has a material attribute identification
number equal to its element identification number. For example, the sequence 1 3 IDENTITY
means that element#1 has the material attribute identification 1, element#2 has the material attribute identification 2,
and element#3 has the material attribute identification 3.
|
HRC
| Sub-command keyword to request
the application of a specified hyper reduction coefficient to the
element-level reduced internal forces and moments and acquiring this
coefficient (characters).
|
HRCOEFF
| Hyper reduction coefficient computed by the RMSHC command and stored in the result file SAMPLMSH under OUTPUT (float).
|
[EXTFOL]
| Optional sub-command keyword to
request the application of the specified hyper reduction coefficient to
all of the element-level reduced internal forces and moments and the
element-level reduced follower external forces and moments
(see FORCES) (characters).
|
12 BEAM OFFSET
|
Command Statement: BOFFSET
|
The BOFFSET command statement is used to specify a beam's neutral axis
offset from the line passing through its two end nodes. This command may
be used for both Euler-Bernoulli and Timoshenko beam elements. For beam
elements not listed under BOFFSET, a zero offset is used. If the BOFFSET
command is absent altogether, then an offset of zero is used for all beam
elements. If a listed element is neither an Euler-Bernoulli nor a
Timoshenko beam element, then the offset is ignored for that element.
The input format is as follows.
STARTING_ELEMENT# ENDING_ELEMENT# x y z
|
STARTING_ELEMENT#
| First element of a sequence of elements that have the same offset specified by {x, y, z} (integer).
|
ENDING_ELEMENT#
| Last element of a sequence of elements that have the same offset specified by {x, y, z} (integer). If ENDING_ELEMENT# is the same as STARTING_ELEMENT#, then the specified offset is applied to that element only (integer).
|
x
| x component of the offset vector expressed in the global frame (float).
|
y
| y component of the offset vector expressed in the global frame (float).
|
z
| z component of the offset vector expressed in the global frame (float).
|
13 BEAM REFERENCE FRAMES
|
Command Statement: EFRAMES
|
The EFRAMES command statement is used to specify a beam's orientation which defines the position of the beam
with respect to the global frame. The requirements for each beam frame are that one of the axis, the local x-axis, concurs with the longitudinal axis of
the beam, and the remaining two axes complete an orthogonal triad. If this requirement is violated, AERO-S regenerates the local x-axis
as well as the local z-axis.
For flexible beams, AERO-S also supports a run-time
generation of frames that is activated either when the target
flexible beam element is identified under this command and a third node
is specified to generate the frame, or when a third node is
found in the definition of a flexible beam element within the TOPOLOGY command. The only requirement for the third node is
that it does not be colinear with the other two beam nodes that define the local x-axis (X). Under this command, the third node
defines the X,Y plane. Under the TOPOLOGY command, it defines the X,Z plane. Using the third node option under
the TOPOLOGY command also relieves the user from specifying the EFRAMES command. An example illustrating the
third node option in the TOPOLOGY command can be found in FEM.d/fem_examples/Third_Node.d
Otherwise, the input format for this command is given below with the number of lines equal to the
number of beams in the problem.
or
ELEMENT# THIRDNODE third_node
|
Note 1: The above axes have to be normalized.
By default, the beam frames concur with the global frame.
14 BINARY INPUT / OUTPUT
|
Command Statement: BINARY
|
When the finite element model of interest is very large, it may
become necessary (for example, because of memory limitations), to
organize the input data of an AERO-S
computation in a set of binary distributed files, and more efficient to
output its results in another set of binary distributed files. This
requires:
- Using a version of aeros that is compiled in the distributed memory execution mode.
- Generating and using a mesh partition for the target simulation.
- Generating the binary distributed input files associated with the above mesh partition, as explained below.
- Inputting these binary distributed input files and if desired requesting the binary distributed format for the
output files, using the command
BINARY explained herein.
To decompose the input data contained in an initial instance of the ASCII Input Command Data file according
to a generated mesh partition and reorganize it in a set of binary distributed input files, the user
should use the specialized version of the software SOWER that is embedded in AERO-S.
The generated binary distributed input files can then be inputted via
this command in the final instance of the ASCII Input Command Data file.
This command can also be used to request outputting the results marked
for output in OUTPUT and/or OUTPUT6 in the binary distributed format
compatible with the generated mesh partition. In that case, the original SOWER (see SOWER's User's Reference Manual)
should be used to convert these output files into the ASCII format suitable for postprocessing by XPost.
If memory is not an issue, AERO-S can also operate directly on the global set of input data — that is,
on the standard content of the ASCII Input Command Data file.
Note 1: If aeros is not compiled in the distributed memory execution mode, it can only generate ASCII output files.
Most of these are in a format that is suitable for postprocessing by the XPost software, but some are in a format
that is suitable for postprocessing by gnuplot.
Note 2: Any command present in the initial instance of the
ASCII Input Command Data file and whose description in this User's
Reference Manual is marked by "*S*"
can be assumed to be contained in one of the aforementioned binary
distributed input files. However, if that command contains both an
algorithmic parameter as well as data,
only the data will be contained in the appropriate distributed binary
input file. Therefore, the command itself should be kept in
the updated ASCII Input Command Data file together with the algorithmic
parameter, but without the data. For example, the command
IDISPLACEMENTS specifies both an amplification factor and an initial displacement data.
The initial displacement data will be included in the aforementioned binary distributed input file, but the amplification
factor will not. This is to allow the user to change simple things such as this amplification factor without
having to regenerate the binary distribtued input files.
Note 3: This data organization option does not support the sparse direct solver MUMPS (see STATICS).
The syntax for this command is as follows.
BINARYINPUT | flagBIN | [<pathandfileprefix>]
| BINARYOUTPUT | flagBOUT
| CPUMAP | <pathandfilename>
|
|
BINARYINPUT flagBIN
| This pair of sub-command keyword (characters) and corresponding value (characters) can be used to choose between reading
the binary distributed input files designated by <pathandfileprefix>, or the standard ASCII global input data contained in the initial instance of the
ASCII Input Command Data file. flagBIN should be inputted on the same line as BINARYINPUT; it can take one of the following values:
|
On
| This setting chooses the specified binary distributed input files as input.
In this case, the user should check first that all binary distributed input files have been generated and that the
associated filenames and path are those referred to in <pathandfileprefix>.
|
Off
| This setting, which is also
the default setting, chooses the standard ASCII global data.
In this case, the user should check first that all needed
input data is included in the ASCII Input Command Data file.
|
<pathandfileprefix>
| This entry is relevant only when flagBIN is set to On. By default, AERO-S expects the binary input data command to be contained in four binary
distributed files named INPUT.dec, INPUT.con, INPUT.sub, and INPUT.msh.
Alternatively, this data can be contained in four equivalent files that are named differently, as long as they share
the same path and filename prefix — that is, these four binary distributed files must have the same path and can be
named fileprefix.dec (substitute for INPUT.dec), fileprefix.con (substitute for
INPUT.con), fileprefix.sub (substitute for INPUT.sub), and prefixfile.msh
(substitute for INPUT.msh). In the latter case, <pathandfileprefix> specifies the common filename prefix
(and file path if needed) (characters).
|
BINARYOUTPUT flagBOUT
| This pair of sub-command keyword (characters) and corresponding value (characters) can be used to choose between
outputting the results specified in OUTPUT and/or OUTPUT6 in the binary distributed format, or the standard ASCII global format.
flagBOUT should be inputted on the same line as BINARYOUTPUT; it can take one of the following values:
|
On
| This setting chooses the binary distributed format for all output files that support it.
|
Off
| This setting, which is also the default setting, chooses the standard ASCII global format for all output files.
|
CPUMAP <pathandfilename>
| This pair of sub-command
keyword (characters) and corresponding value (characters) can be used to
input a CPU map file – that is, a file that specifies to which CPU each
subdomain is to be assigned.
The format of this file is the same as that of the decomposition
file, with the number of subdomains replaced by the number of CPUs, the
number of elements in a given subdomain replaced by the number of
subdomains in a
given CPU, and the element ID number in each subdomain replaced by
the subdomain ID number in each CPU. The default for <pathandfilename> is CPUMAP, in which case this file must be located in the directory
where the simulation is launched. If <pathandfilename>
is not specified and a file named CPUMAP is not found in the
aforementioned directory, a default subdomain-to-CPU map is internally
generated by
AERO-S.
|
15 BOUNDARY CONVECTION *S*
Command Statement: CONVECTION [LOADSET_ID]
|
The CONVECTION command statement is used to specify
nodal convection type boundary conditions. Each node can have only
one degree of freedom. This command statement can be used
to solve a prescribed boundary convection problem for both statics and
dynamics. The input format is given below.
Note 1: This command contributes to the construction of the right-hand side
vector only. For the left-hand side (stiffness matrix) contribution,
AERO-S uses boundary convection elements and
information specified in the MATERIAL command.
LOADSET_ID
| Optional non-negative integer
which identifies explicitly the "load" set to which the source term
generated by this command belongs to (integer).
The default value is 0. Hence, the CONVECTION command can be repeated as many times as desired within the same input file using
each time a different value for LOADSET_ID and different data. The LOADCASE command can refer to LOADSET_ID to define one or multiple "load" cases
for static analysis (see the STATICS command and the explanation of its sub-command keyword CASES), and/or the "load" case for dynamic analysis.
|
NODE#
| Node number where the convection is specified (integer).
|
H_COEFF
| Convection coefficient at the prescribed node (float).
|
AREA
| Value of the node cross-sectional area (float).
|
TA
| Ambient temperature around the node (float).
|
16 BOUNDARY DISPLACEMENTS *S*
|
Command Statement: DISPLACEMENTS
|
The DISPLACEMENTS command is used to prescribe nodal displacements and/or rotations, either directly,
or via the definition of a surface using the command SURFACETOPO. In the latter case,
the specified displacement or rotation is applied to each specified local degree of freedom of each node of that surface.
The user can specify up to three displacements per node if a node can have up to three degrees of freedom,
and up to three displacements and three rotations if it can have up to six degrees of freedom.
Note 1: All degrees of freedom referred to by this command are
defined in the nodal degree of freedom reference frames defined at the
nodes
where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal degree of freedom reference frames are the same
as the global reference frame.
Note 2: This command can also be used to specify nodal Dirichlet boundary conditions for a time-domain
of frequency-domain acoustic simulation by setting DOF# to 8 (see below). Hence, it can also serve as an alternative
to the ATDDIR and HDIR commands.
Note 3: In the context of a linearized (perturbation) analysis, the displacements boundary conditions specified under this
command are interpreted as displacement boundary perturbations.
Note 4: When the analysis is performed in the complex plane — for
example, in a frequency response analysis of a damped system — this
command can be used to prescribe only the real part of nodal
displacements and/or rotations, as in this case it automatically sets
their
imaginary part to zero.
The following two formats are available for this command and can be mixed.
SURFACE SURFACE# DOF# VALUE
|
NODE#
| Node number where the displacement or rotation is specified (integer).
|
DOF#
| Degree of freedom local number where the displacement or rotation is specified (integer).
|
VALUE
| Value of the specified displacement or rotation (real).
|
SURFACE
| Keyword indicating that a surface defined in SURFACETOPO is to be identified next by its integer identification number (characters).
|
SURFACE#
| Integer identification of the surface defined in SURFACETOPO where the force VALUE is specified (integer).
|
17 BOUNDARY FLUXES
Command Statement: FLUX [LOADSET_ID]
|
The FLUX command statement is used to specify nodal heat sources (for example, products of nodal
areas and nodal values of finite element fluxes) either directly, or via the definition of a surface using
the command SURFACETOPO. In the latter case,
a specified heat source is applied to each node of the identified surface.
This command statement can be used to define both statics and dynamics heat problems with prescribed
temperature flux boundary conditions.
Its input format is given below.
LOADSET_ID
| Optional non-negative integer
which identifies explicitly the "load" set to which the source term
generated by this command belongs to (integer).
The default value is 0. Hence, the FLUXES command can be repeated as many times as desired within the same input file using
each time a different value for LOADSET_ID and different data. The LOADCASE command can refer to LOADSET_ID to define one or multiple "load" cases
for static analysis (see the STATICS command and the explanation of its sub-command keyword CASES), and/or the "load" case for dynamic analysis.
|
NODE#
| Node number where the flux is specified (integer).
|
VALUE
| Value of the prescribed boundary flux (float).
|
SURFACE
| Keyword indicating that a surface defined in SURFACETOPO is to be identified next by its integer identification number (characters).
|
SURFACE#
| Integer identification of the surface defined in SURFACETOPO where the nodal heat source VALUE is specified (integer).
|
18 BOUNDARY FORCES *S*
Command Statement: FORCES [LOADSET_ID]
|
The FORCES command is used to prescribe external nodal forces and/or moments, either directly,
or via the definition of a surface using the SURFACETOPO command. In the latter case,
the specified force or moment is applied to each specified local degree of freedom of each node of that surface.
The user can specify up to three forces per node if a node has three degrees of freedom attached to it,
and up to three forces and three moments if it has six degrees of freedom attached to it.
By default, all prescribed forces and moments are interpreted as being of the axial type — that is, as being
defined in the fixed nodal degree of freedom reference frames (see NODES and NFRAMES).
However, if a node has rotational degrees of freedom, the user
can specify that the forces and/or moments prescribed at this node
are of the follower type — that is, they act in a direction that remains constant in the local frame attached to the node
where they are applied. This local frame coincides with the nodal degree of freedom reference frame
(see NODES and NFRAMES) in the undeformed configuration. In the deformed configuration, the orientation of
this local frame is defined by the rotation of the node to which it is attached. In other words, the specified
nodal force or moment "follows" in this case the rotation of the node to which it is applied.
Finally, the user can also time-vary the specified forces and moments using the MFTT command.
Note 1: By default, the nodal degree of freedom reference frames are the same as the global reference frame.
Note 2: This command can also be used to specify nodal Neumann boundary conditions for a time-domain acoustic
simulation by setting DOF# to 8 (see below). Hence, it can also serve as an alternative to the ATDNEU
command (see ATDNEU).
Note 3: Specifying a follower force or moment leads to an unsymmetric tangent "load" stiffness matrix during
a NONLINEAR analysis.
The following two formats are available for this command and can be mixed.
NODE# | DOF# | VALUE | TYPE |
| SURFACE | SURFACE# | DOF# | VALUE | TYPE
|
|
LOADSET_ID
| Optional non-negative integer
which identifies explicitly the "load" set to which the source term
generated by this command belongs to (integer).
The default value is 0. Hence, the FORCES command can be repeated as many times as desired within the same input file using
each time a different value for LOADSET_ID and different data. The LOADCASE command can refer to LOADSET_ID to define one or multiple "load" cases
for static analysis (see the STATICS command and the explanation of its sub-command keyword CASES), and/or the "load" case for dynamic analysis.
|
NODE#
| Node number where the force or moment is specified (integer).
|
DOF#
| Degree of freedom local number where the force or rotation is specified (integer).
|
VALUE
| Value of the specified force or moment (real).
|
TYPE
| By default, all specified nodal forces and moments are considered to be of the axial type. However, if this parameter
is set to FOLLOWER and the node where a force or moment is specified has rotational degrees of freedom, this
specified nodal force or moment is considered to be of the follower type (characters).
|
SURFACE
| Keyword indicating that a surface defined in SURFACETOPO is to be identified next by its integer identification number (characters).
|
SURFACE#
| Integer identification of the surface defined in SURFACETOPO where the force or moment VALUE is specified (integer).
|
19 BOUNDARY TEMPERATURES *S*
|
Command Statement: TEMPERATURES
|
The TEMPERATURES command statement is used to specify prescribed
nodal temperature type boundary conditions either directly, or via the definition of a surface using the command SURFACETOPO.
In the latter case, a specified temperature is applied to each node of the identified surface.
For structural analysis using AERO-S, this command statement
causes AERO-S to construct
a thermal load based on the prescribed nodal temperatures and the reference temperatures
(see MATLAW, see TOPOLOGY, and use this load as usual in a structural analysis).
Note 1: The default value of a nodal temperature is the reference temperature Ta of the element containing this node (see MATERIAL).
The input format of this command is given below.
NODE#
| Node number where the temperature is specified (integer).
|
VALUE
| Value of the prescribed temperature (float).
|
SURFACE
| Keyword indicating that a surface defined in SURFACETOPO is to be identified next by its integer identification number (characters).
|
SURFACE#
| Integer identification of the surface defined in SURFACETOPO where the temperature VALUE is specified (integer).
|
20 BUCKLING
|
Command Statement: BUCKLE
|
The BUCKLE command statement is to be used together with the GEPS, IDISP6 (with  ),
and
),
and EIGEN command statements to request the buckling analysis of a given
structure.
When the EIGEN, GEPS, and IDISP6 (with ) command statements are specified in
the input file, the BUCKLE command statement signals to FEM that the eigenvalue
problem to be solved is  , where
, where  is the geometric
stiffness matrix associated with a displacement field specified under the
is the geometric
stiffness matrix associated with a displacement field specified under the
IDISP6 command statement, and whose computation is triggered by the presence
of the GEPS command statement in the input file. For each eigenvalue
 , the corresponding buckling load is
, the corresponding buckling load is  where f is the load that
created the displacement field specified under the
where f is the load that
created the displacement field specified under the IDISP6 command.
An example input file that illustrates a buckling analysis can be found in FEM.d/fem_examples/Buckle.d
The syntax for invoking this option is given below.
21 CLUSTERING SNAPSHOTS OR CONSTRUCTING A REDUCED BASIS
The ROBC command can be used to perform either of the following tasks:
- Compress using SVD (Singular Value Decomposition) one or multiple
specified sets of primal displacement, velocity, and/or acceleration
solution snapshots, and/or one or multiple specified sets of
previously computed primal or dual Reduced-Order Basis (ROB)
vectors, to construct a global or a set of local primal ROBs.
- Compress using SVD one or multiple specified sets of dual (Lagrange multiplier) solution snapshots, and/or
one or multiple specified sets of previously computed dual ROB vectors
to construct a
global or a set of local dual ROBs. In this case, SVD is
appropriate only if the Lagrange multipliers are introduced to enforce
equality constraints.
- Compress using NMF (Non-negative Matrix Factorization) one or
multiple specified sets of dual (Lagrange multiplier) solution snapshots
to construct a global or a set of local dual ROBs. In this
case, NMF is appropriate if the Lagrange multipliers are
introduced to enforce inequality constraints (e.g. contact).
- Cluster a set of displacement solution snapshots (and assign to
constructed clusters other quantities such as associated velocity,
acceleration, and or Lagrange multiplier solution snapshots)
using the k-means algorithm in order to:
- Construct in a followup simulation a set of local ROBs, using this same
ROBC command and the computational approach described in D.
Amsallem, M. Zahr and
C. Farhat, "Nonlinear Model Order Reduction Based on Local
Reduced-Order Bases," International Journal for Numerical Methods in
Engineering, Vol. 92, pp. 891-916 (2012).
- Provide training data for the ECSW hyper reduction method described in C.
Farhat, P. Avery, T. Chapman and J. Cortial, "Dimensional Reduction of
Nonlinear Finite Element Dynamic
Models with Finite Rotations and Energy-Conserving Mesh Sampling
and Weighting for Computational Efficiency," International Journal of
Numerical Methods in Engineering, Vol. 98, pp. 625-662 (2014)
and analyzed in C. Farhat, T. Chapman and P. Avery,
"Structure-Preserving, Stability, and Accuracy Properties of the
Energy-Conserving Sampling and Weighting (ECSW) Method for the Hyper
Reduction of Nonlinear Finite Element Dynamic Models,"
International Journal for Numerical Methods in Engineering, Vol. 102,
pp. 1077-1110 (2015).
- Orthonormalize a previously computed global or local
primal ROB with respect to the mass matrix arising from the current
ASCII Input Command Data file.
In the first and second cases:
- If scaling is requested (see the
SSCALI sub-command):
- All inputted primal or dual snapshots are scaled using their
associated weights – that is, the square roots of the quadrature weights
of the time-continuous snapshot correlation
matrix (see the explanation of the
SNAPFI sub-command for more details) – before the these snapshots are compressed using the SVD.
- All inputted primal ROB vectors are scaled before data compression is performed using their associated nonzero singular values.
- All inputted dual ROB vectors are scaled before data
compression is performed using their associated nonzero singular values,
if SVD is chosen as the data compression algorithm.
- If normalization is requested (see the
SNORMA sub-command), all inputted primal or dual snapshots or ROBs are normalized using the infinity (max) norm, before the SVD is
performed on these snapshots or ROBs.
- If both scaling and normalization are requested, only normalization is performed.
Each computed cluster of displacement (and other associated
quantities) is outputted by this same command as described in the
explanation of the DO_CLUSTERING sub-command keyword.
On the other hand, any computed ROB can be outputted using the result keyword ROBDATAF under OUTPUT.
Note 1: Currently, model reduction of linear or nonlinear
problems with equality or inequality constraints is supported only
for implicit dynamics, and for those cases where such constraints are
linear — that is, for those cases where such constraints arise
from:
- NODALCONTACT with
mode_v = 1 or mode_v = 3.
- LMPC with
mode_v = 1.
- Constraint function elements with
mode_v = 1 (see TOPOLOGY).
Note 2: In such cases, solution snapshot collection for the construction of a dual ROB can be performed only when the constraint
method (see CONSTRAINTS) is chosen to be:
multipliers equipped with the FETI DP solver (see STATICS).
augmented equipped with the parallel mumps solver (see STATICS).
Note 3: This command can be executed in parallel by partitioning the mesh associated with the underlying finite element model
of interest using the DECOMPOSE command — or the corresponding command line to request mesh partitioning or provide
aeros a previously computed mesh partition (see DECOMPOSE).
The input format of this command is given below.
SNAPFI | <pathandfilenameS1> | <pathandfilenameS2> | ... | ... | <pathandfilenameSN>
| VELSNAPFI | <pathandfilenameV1> | <pathandfilenameV2> | ... | ... | <pathandfilenameVN>
| ACCSNAPFI | <pathandfilenameA1> | <pathandfilenameA2> | ... | ... | <pathandfilenameAN>
| ROBFI | <pathandfilenameR1> | <pathandfilenameR2> | ... | ... | <pathandfilenameRN>
| SSCALI | flagss | flagrs | | |
| SNORMA | flagsn | flagrn | | |
| COMPRESS | flagco | | | |
| DIMENS | dim | | | |
| ROMENR | 
| MNORMA | flagmn | | | |
| SKIP | freq | [offset] | | |
| USE_NMF | maxnoi | cvtolr | | |
| USE_NMF | numrob | incsiz | numini | maxnoi | cvtolr
| USE_GREEDY | | | | |
| USE_PQN | maxnoi | cvtolr | maxini | stepln |
| NSUBS | nblcks | | | |
| DO_CLUSTERING | nclusters | | | |
|
|
SNAPFI
| Sub-command keyword for
specifying one or multiple ASCII or binary files containing solution
snapshots and associated weights (characters). These snapshots can be:
- Primal (displacement, velocity, and/or acceleartion) or dual
(Lagrange multiplier) solution snapshots, if this command is used to
construct a primal or dual, global or local ROB.
- Displacement solution snapshots, if this command is used for the purpose of clustering.
If the solution snapshots were generated in the time domain, the
weight of a solution snapshot is the square root of the average of the
time-steps separating this snapshot from the
previous and next ones, except for the first and last outputted
solution snapshots which are computed as follows: the weight of the
first solution snapshot is the square root of the
time-step separating this snapshot and the next one, and that of
the last solution snapshot is computed as the square root of the
time-step separating this snapshot and the previous one.
|
<pathandfilenameS>
| Path and name of each ASCII or
binary file containing solution snapshots and associated weights
(characters). If more than one file is specified, all files are read.
The union of all
inputted solution snapshot vectors (and consistent ROB vectors
inputted after the ROBFI sub-command keyword) is either:
- Compressed to construct the desired ROB: in this case, all
inputted solution snapshots can be scaled by their associated weights or
normalized using the infinity norm
before they are compressed using the SVD, if requested using
SSCALI or SNORMA, respectively.
- Or clustered (see
DO_CLUSTERING).
|
VELSNAPFI
| Optional sub-command keyword for
specifying one or multiple ASCII or binary files containing velocity
solution snapshots (characters). It should be used only when this
command is used for
clustering solution snapshots. In this case, the velocity solution
snapshots are regrouped in the same clusters as the associated
displacement solution
snapshots and saved in the binary files <pathandfilenameV1>.clusterj, where j is the cluster index.
|
<pathandfilenameV>
| Path and name of each ASCII or
binary file containing velocity solution snapshots (characters). If more
than one file is specified, all files are read. The union of all
inputted velocity s
olution snapshots is clustered when the DO_CLUSTERING sub-command keyword is used (see below).
|
ACCSNAPFI
| Optional sub-command keyword for
specifying one or multiple ASCII or binary files containing
acceleration solution snapshots (characters). It should be used only
when this command is used for
clustering solution snapshots. In this case, the acceleration
solution snapshots are regrouped in the same clusters as the associated
displacement
solution snapshots and saved in the binary files <pathandfilenameA1>.clusterj, where j is the cluster index.
|
<pathandfilenameA>
| Path and name of each ASCII or
binary file containing acceleration solution snapshots (characters). If
more than one file is specified, all files are read.
The union of all inputted acceleration solution snapshots is
clustered when the DO_CLUSTERING sub-command keyword is used (see below).
|
ROBFI
| Sub-command keyword (characters) for specifying one or multiple ASCII or binary files containing:
- ROB vectors.
- Associated weights (singular values, if these vectors were generated using SVD.)
|
ROBFI
| Sub-command keyword (characters) for specifying one or multiple ASCII or binary files containing:
- ROB vectors.
- Associated weights (singular values, if these vectors were generated using SVD).
|
<pathandfilenameR>
| Path and name of each ASCII or
binary file containing ROB vectors (and when applicable, associated
weights) to be considered for constructing the desired ROB
(characters). If more than one file is specified, all files are
read. The union of these ROB vectors (and potentially solution snapshots
inputted after the SNAPFI)
sub-command keyword) is compressed by SVD or NMF, as specified, to construct the desired ROB. When requested using SSCALI or SNORMA,
all inputted
ROB vectors are scaled by their associated weights or normalized
using the infinity norm, respectively, if SVD is chosen as the data
compression algorithm.
|
SSCALI
| Sub-command keyword for specifying whether to scale or not the snapshots inputted using SNAPFI, or the ROB vectors inputted using ROBFI
by their associated weights, when this
command is used for the purpose of constructing a desired ROB and
SVD is chosen as the data compression algorithm (characters).
|
flagss
| If this flag is set to YES, the snapshots inputted using SNAPFI are scaled by their associated weights before they are used to construct a ROB.
If it is set to NO, which is the default setting, they are left as is.
|
flagrs
| If this flag is set to YES, the ROB vectors inputted using ROBFI are scaled by their associated weights before they are used to construct a ROB.
If it is set to NO, which is the default setting, they are left as is.
|
SNORMA
| Sub-command keyword for specifying whether to normalize or not – using the infinity norm – the snapshots inputted via SNAPFI, or the ROB vectors inputted using ROBFI,
when this command is used for the purpose of constructing a
desired ROB and SVD is chosen as the data compression algorithm
(characters).
|
flagsn
| If this flag is set to YES, the snapshots inputted using SNAPFI are normalized using the infinity norm before they are used
to construct a ROB. If it is set to NO, which is the default setting, they are left as is.
|
flagrn
| If this flag is set to YES, the ROB vectors inputted using ROBFI are normalized using the infinity norm before they are used to construct a ROB. If it is set to NO,
which is the default setting, they are left as is.
|
COMPRESS
| Sub-command keyword relevant only when the ROBC
command is used specifically for orthonormalizing a previously computed
global or local primal ROB with respect to the mass matrix
arising from the current ASCII Input Command Data file. Its
purpose is to specify whether or not to compress the solution snapshots
inputted under SNAPFI and/or ROBFI (characters).
|
flagco
| This flag can have one of the following two settings:
NO: In this case, the information inputted under SNAPFI or ROBFI should be the column vectors of a previously computed global or local primal ROB, and the
objective of the ROBC command should be to
orthonormalize this primal ROB with respect to the mass matrix arising
from the current ASCII Input Command Data file.
YES: This is the default setting. In this case, the information inputted under SNAPFI and/or ROBFI is compressed using SVD or NMF, as specified.
|
DIMENS
| Sub-command keyword for specifying the desired dimension of the ROB to be constructed (characters). Note that if both ROMENR
and this sub-command keyword are specified in the same
ASCII Input Command Data file, this sub-command keyword takes
priority. If none of them is specified and the ROB is constructed using
SVD, the dimension of this ROB is set to the rank of the
snapshot matrix.
|
dim
| Dimension of the ROB to be
constructed (integer). The default value is the minimum between the
total number of degrees of freedom of the underlying finite element
model, and the total number
of vectors to be compressed.
|
ROMENR
| Sub-command keyword that is
relevant only when SVD is chosen as the data compression algorithm for
constructing a global or local, primal or dual ROB.
It requests using the criterion based on the relative energy of
the solution snapshots captured by the first SVD vectors to truncate
the SVD basis and therefore determine the appropriate dimension  of the ROB to be constructed (characters). Specifically, is determined in this case
so that the square of the relative error gives an indication of the magnitude of the "missing" information — that is of the ROB to be constructed (characters). Specifically, is determined in this case
so that the square of the relative error gives an indication of the magnitude of the "missing" information — that is
where  is the matrix of is the matrix of  solution snapshots, solution snapshots,  is its rank, is its rank,  is the size of the high-dimensional model, is the size of the high-dimensional model,  is the is the
 -th singular value of -th singular value of  , ,  , and , and  is the desired ratio of the energy of the solution snapshots captured by the constructed
ROB and total energy of the computed solution snapshots and is specified below. Note that if both is the desired ratio of the energy of the solution snapshots captured by the constructed
ROB and total energy of the computed solution snapshots and is specified below. Note that if both DIMENS and this sub-command keyword are specified in the same ASCII Input Command Data file,
DIMENS takes priority. If none of them is specified
and the ROB is constructed using SVD, the dimension of this ROB is set
to the rank of the
snapshot matrix.
|
|
| Desired value of the ratio of the energy of the solution snapshots to be captured by the constructed ROB, and total energy of the computed
solution snapshots (real).
|
MNORMA
| Sub-command keyword for specifying the SVD-based computation of the desired global or local, primal ROB (characters).
|
flagmn
| This flag can have one of the following three settings:
IM: This is the defaut setting. In this case, two equivalent but different ROBs are computed as follows and in this order:
- First, one ROB that is orthonormalized with respect to the identity matrix.
- Second, a counterpart ROB whose
columns span the same subspace, but which is orthonormalized with
respect to the mass matrix. In this case, the construction of the second
ROB
does not incur the factorization of the
high-dimensional mass matrix, but that of the reduced mass matrix. Note
that if the high-dimensional mass matrix is singular, the reduced mass
matrix may or may not be singular, depending on
the content of the ROB.
MI: In this case, two equivalent but different ROBs are computed as follows and in this order:
- First, one ROB that is orthonormalized with
respect to the mass matrix and computed using an algorithm that
factorizes this mass matrix. Hence, in this case,
the user must ensure that the mass matrix of
the finite element model is non singular.
- A counterpart ROB whose columns span the same subspace, but which is orthonormalized with respect to the identity matrix.
ID: In this case, a single ROB that is orthonormalized with respect to the identity matrix is computed.
|
SKIP
| Sub-command keyword for specifying whether or not to skip some of the solution snapshots inputted using the SNAPFI sub-command keyword
for the purpose of their clustering or the construction of the desired ROB (characters).
|
freq
| Frequency (every so many) at
which to skip a solution snapshot in any specified solution snapshot
file (integer). The default value is 1.
|
offset
| Offset in terms of the solution snapshot number to apply before starting the skipping process (integer). The
default value is 0.
|
USE_NMF
| Sub-command keyword that is relevant only for the solution of the class of constrained problems identified above, using
the methods and algorithms also identified above.
It activates the computation of a dual ROB using the non-negative matrix factorization approach based on
the alternating Non-Negative Least-Squares (NNLS) method (characters).
|
maxnoi
| Maximum number of outer-iterations for the non-negative matrix factorization algorithm (integer).
|
cvtolr
| Relative convergence tolerance
of the Frobenius norm of the dual basis increment computed at each
iteration of the
non-negative matrix factorization method (real). This parameter is
relevant only for the solution of the class of constrained
problems identified above, using the methods and algorithms also
identified above.
|
numrob
| Number of ROBs to be computed (integer). The default value is 1.
|
incsiz
| Size increment to apply when computing multiple ROBs (integer).
|
numini
| Number of random initializations to perform when computing each ROB (integer). The default value is 1.
|
USE_GREEDY
| Sub-command keyword for activating the computation of a dual
ROB using a Greedy method (characters). This parameter
is relevant only for the solution of the class of constrained
problems identified above, using the methods and algorithms also
identified above.
|
USE_PQN
| Sub-command keyword for activating the computation of a dual ROB using the non-negative matrix factorization approach
based on a projected quasi-Newton method (characters). It is relevant only for the solution of the class of constrained
problems identified above, using the methods and algorithms also identified above.
|
maxini
| Maximum number of
inner-iterations that can be performed by the projected quasi-Newton
method for computing the non-negative matrix factorization (integer).
|
stepln
| Step length parameter for the projected quasi-Newton method for computing the non-negative matrix factorization (real).
|
nblcks
| Number of column-wise blocks defining the parallelization strategy for the alternating NNLS method (integer). The default
value is 1.
|
DO_CLUSTERING
| Sub-command keyword for
clustering a set of displacement solution snapshots using the k-means
algorithm. In this case, the generated solution snapshot clusters and
their centroids are saved
in the binary files <pathandfilenameS1>.clusterj and <pathandfilenameS1>.clusterj.centroid, respectively, where j designates the  -th cluster and -th cluster and
<pathandfilenameS1> is the <pathandfilenameS1> specified after the SNAPFI sub-command keyword. If the optional VELSNAPFI
sub-command keyword
is also specified (see above),
the inputted velocity solution snapshots are regrouped in the same
clusters as the associated displacement solution snapshots and saved in
the binary files
<pathandfilenameV1>.clusterj, where j is the cluster index. Similarly, if the optional ACCSNAPFI
sub-command keyword is also specified (see above), the inputted
acceleration
solution snapshots are regrouped in the same clusters as the
associated displacement solution snapshots and saved in the binary files
<pathandfilenameA1>.clusterj, where j is the cluster
index.
|
nclusters
| Desired number of clusters (integer).
|
22 COMMENTS
The '*' at the beginning of a line indicates that the subsequent
input on the same line is a comment. For FEM, it can be
placed anywhere.
23 COMPOSITE (OR ORTHOTROPIC SHELL OR ANISOTROPIC SOLID)
|
Command Statement: COMPOSITE
|
The COMPOSITE command is used to specify the
properties of a composite, anisotropic, or orthotropic solid, shell, or
membrane element made of a linear material.
It currently supports only the solid elements type 17, 23, 24, 25, 72,
91 92, and 97, the (Kirchhoff) shell elements type 15, 1515, 20, and
2020,
and the membrane elements type 128 and 129. All information concerning
constitutive coefficients or the layering of a composite is inputted
using this command.
For the above solid elements, the constitutive matrix, the
coefficients of thermal expansion, and the hygroelastic coupling
coefficients are inputted using the COEF sub-command.
The constitutive matrix is defined in the local frame of the element specified in the CFRAMES command. Entries in the matrix that are not specified are determined from
symmetry if appropriate, or are set to zero.
For the shell elements, the composite (anisotropic, or orthotropic) constitutive law can be prescribed either by entering
the  coefficients of the 6 by 6 constitutive matrix, or by
defining the material properties and geometrical characteristics for each layer of the composite.
In the first case, the
coefficients of the 6 by 6 constitutive matrix, or by
defining the material properties and geometrical characteristics for each layer of the composite.
In the first case, the COEF sub-command should be used. In the second case, either of the LAYC and LAYN sub-commands can be used, depending on whether
the coupling between bending and membrane effects is to be
enforced or not, respectively. When many layers of the composite are made of the same anisotropic material,
the LAYD and LAYMAT sub-commands can be used instead of the LAYC sub-command
to simplify the data entry process. Likewise, in similar circumstances, the LAYO and LAYMAT sub-commands
can be used instead of the LAYN sub-command.
Note 1: If a laminate layup is unsymmetric (with respect to the mid-plane), the plies must be numbered from the top side to
the bottom side, with the top side defined by the direction of its element normals that must point from bottom to top.
Note 2: In a nonlinear analysis, the COEF sub-command can currently be used only to define an anisotropic hyperelastic or
hyperviscoelastic material. Hence, it can be specified together with the following material laws: Linear, LinearPlaneStress,
HyperElasticPlaneStress, HenckyElastic, StVenantKirchhoff, ViscoLinearElastic, ViscoStVenantKirchhoff,
ViscoLinearPlaneStress, and ViscoHyperElasticPlaneStress (see MATLAW). In the case of StVenantKirchhoff
and HyperElastic, the material laws relate the Green-Lagrange (engineering) strain and its conjugate stress, the second Piola-Kirchhoff stress.
In the case of HenckyElastic, the material law relates the Lagrangian Hencky (engineering) strain and its conjugate stress, the rotated Kirchhoff stress.
Note 3: The case of a linear hyperelastic material includes the special case of a linear hygrothermoelastic material represented by the constitutive equation

where  and denote the vectorized stress and strain tensors, respectively;
and denote the vectorized stress and strain tensors, respectively;  denotes the temperature field;
denotes the temperature field;  denotes the
moisture concentration (mole number);
denotes the
moisture concentration (mole number);  denotes the standard constitutive matrix for elasticity; and denote the vectorized tensors of thermal expansion
and hygroelastic coupling coefficients, respectively; and
denotes the standard constitutive matrix for elasticity; and denote the vectorized tensors of thermal expansion
and hygroelastic coupling coefficients, respectively; and  and
and  denote the temperature and moisture concentration of the reference (stress-free) state of the material, respectively.
For example,
denote the temperature and moisture concentration of the reference (stress-free) state of the material, respectively.
For example,  can be chosen to be the ambient temperature
can be chosen to be the ambient temperature  specified in MATERIAL.
specified in MATERIAL.
The input format for the composite COMPOSITE is given below.
For a solid or anisotropic shell or membrane element equipped
with a numerically-enforced plane stress counterpart of a 3D material
law (seeMATLAW),
the constitutive matrix C relates the stresses to the engineering strains in the element's local frame system {x ; y ; z} as follows:
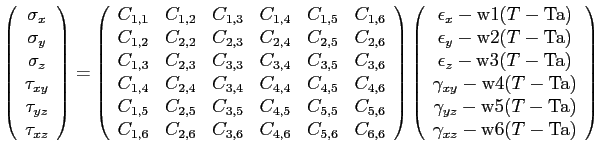
where Ta is the reference temperature specified in MATERIAL.
For a (Kirchhoff) shell element that is not equipped with a numerically-enforced plane stress counterpart of a 3D material law (see MATLAW), the constitutive
matrix C relates the forces and moments to the mid-surface
strains and curvatures in the shell element's local frame system {x ; y ;
z} as follows:
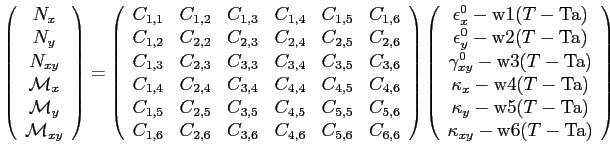
where Ta is the reference temperature specified in MATERIAL.
The element's local axes are defined with respect to the global
reference frame by the three vectors defined in the CFRAMES
command for the corresponding composite (orthotropic, or anisotropic) frame number that is
specified in the ATTRIBUTES section. For shell elements,
the constitutive matrix, C, can be decomposed into sub-matrices
containing the bending and membrane properties of the shell element:

Note the absence of the transverse shear behavior, as can be expected from
a Kirchhoff type shell element.
In the case of an isotropic material, or a single layer orthotropic
or orthotropic material, there is no coupling between the bending
and membrane behavior:
For an isotropic material,
the membrane constitutive matrix can be defined in terms of the
Young's modulus, E, Poisson's ratio,  ,
and shell thickness, h as:
,
and shell thickness, h as:
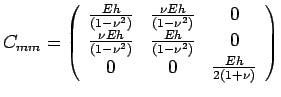
while the bending constitutive matrix is given by:
Using the COEF sub-command, different values of E, , and
h can be utilized for building the membrane and bending components of
the constitutive law, for example, if one wishes to adjust in some specific manner
the bending and membrane behaviors of the shell element.
When the COEF sub-command keyword is used for a shell element that is not equipped with a numerically-enforced plane stress counterpart of a 3D material law (see MATLAW),
the MATERIAL command must be used as follows: both structural and non-structural mass densities per unit area (see the section Notes in MATERIAL
for the definition of a non-structural mass) must be inputted at
the fourth position after the attribute number, and for shells, the
total thickness must also be defined at the
seventh position after the attribute number if a stress analysis is
requested.
For shell elements, if the pre-integrated constitutive matrix C is not available,
the LAYC or LAYN sub-command keywords (or their counterparts LAYD, LAYO and LAYMAT) should be used to input
the material properties and geometrical characteristics of each composite
layer. If either LAYN or LAYO is used, no coupling between bending and
membrane effects is enforced explicitly during integration through the thickness — that is:  ,
,
 and
and  .
.
The input format given below is the same for both LAYC and LAYN sub-commands.
LAYC (or LAYN) attribute#

.
.
.
|
The input format given below is the same for both LAYD and LAYO sub-commands.
LAYC, LAYD, LAYN, or LAYO
| Sub-command keyword used for inputting geometrical and material
properties for each layer of a composite shell element (characters).
|
attribute#
| Integer value that corresponds to the composite (orthotropic) attribute of the element.
|
| Integer value that corresponds to the layer number.
|

| Young's modulus in the local direction  (that is, in
the direction of the fibers for the (that is, in
the direction of the fibers for the  layer). layer).
|

| Young's modulus in the local direction  (that is, in
the direction orthogonal to the fibers for the layer). (that is, in
the direction orthogonal to the fibers for the layer).
|

| Poisson's ratio for transverse strain in the local direction  when stressed
in the local direction when stressed
in the local direction  for for  = constant and all other
stresses zero. = constant and all other
stresses zero.
|

| Transverse shear modulus in the plane  of the layer. of the layer.
|

| Coefficient of mutual influence of the first kind which characterizes
stretching in the local direction caused by shear in the
plane of the layer for  =
constant and all other stresses zero. =
constant and all other stresses zero.
|

| Coefficient of mutual influence of the first kind which characterizes stretching in the local direction caused by shear in the
plane of the layer for = constant and all other stresses zero.
|

| Density (mass per unit volume) of the structural mass type of the material of the layer (real).
|

| Thickness of the layer.
|

| Angle between a reference vector and the fibers in the layer that defines the orientation of these fibers. If CMP_FRM# is specified as an attribute for an element
containing this layer under the ATTRIBUTES
command, the reference vector is the projection onto the plane of that
element of the first of the three vectors defining a local frame for
this element and specified in the CFRAMES command. On the other hand, if a reference angle is specified as an attribute for an element containing this layer under the
ATTRIBUTES command, the reference vector is
the vector obtained by rotating the directional edge connecting local
nodes 1 and 2 of this element around its normal by an angle equal to
. In both cases, this angle must be inputed in degrees.
|

| Coefficient of thermal expansion in the direction . It can be omitted, in which case its default value
is 0.
|

| Coefficient of thermal expansion in the direction . It can be omitted, in which case its default value
is 0.
|

| Coefficient of thermal expansion associated with the in-plane shear strain. It can be omitted, in which case
its default value is 0.
|
LAYER_MATERIAL_ID
| Identifier of a set of material properties (integer).
|
LAYMAT
| Sub-command keyword that can be
used for inputting the properties of a layer when it is made of a
two-dimensional orthotropic material (characters).
|
The report number CU-CAS-94-16, “The 3-node Composite Shell and Isotropic
Timoshenko Beam Elements” by Fran\c cois M. Hemez, provides a detailed description
of the theory and implementation for the type-20 composite (orthotropic) shell element.
24 COMPOSITE (ORTHOTROPIC SHELL OR ANISOTROPIC SOLID) ELEMENT FRAMES
|
Command Statement: CFRAMES
|
The CFRAMES command statement is used to specify the
orientation of composite laminates and orthotropic or anisotropic
elements with respect to the global reference
frame. The input format of this command is given below with the number
of lines equal to the
number of different composite (or orthotropic or anisotropic) element
frames referenced in the ATTRIBUTES command.
CMP_FRM#
| Identification of a composite frame (integer).
|

| The first axis, the local x-axis, expressed in the global frame. For LAYC and LAYN
type composites, the orientation of the fibers of the layers should be
defined with respect to the projection of this axis onto the plane of
the element.
|

| The second axis of the frame expressed in the global frame (floats).
|

| The third axis of the frame expressed in the global frame (floats).
|
25 CONDITION NUMBER
|
Command Statement: CONDITION
|
The CONDITION command statement is used to request the
evaluation of the condition number of the system being solved
by FEM. The input format is given below.
TOLERANCE
| Error tolerance for computing the lowest and highest eigenvalues of the finite element model using the inverse power
and power methods, respectively (float). The default value is  . .
|
MAXITR
| Maximum number of iterations for computing the lowest and highest eigenvalues of the finite element model using the inverse
power and power methods, respectively (integer). The default value is  . .
|
26 CONSTRAINTS
|
Command Statement: CONSTRAINTS
|
The CONSTRAINTS command statement is used to specify a default method for enforcing the constraints defined or associated with a problem.
Its input format is given below.
Note 1: The Lagrange multiplier method for enforcing constraints associated with contact (see CONTACTSURFACES) or tied (see TIEDSURFACES)
surfaces
is currently available for all analyses. However for enforcing
constraints of other origins, it is currently available for all but
explicit dynamic analysis.
Currently, only the spooles and mumps direct solvers with pivoting turned on, the superlu direct solver, and the gmres and FETI DP iterative solvers support this approach for solving
systems of equations with equality constraints (see STATICS), but only the FETI DP iterative solver supports this approach for systems with inequality constraints.
Note 2: The augmented Lagrangian method for enforcing constraints is currently available only for NONLINEAR static and NONLINEAR implicit dynamic analyses.
Note 3: The elimination method is supported only by the following equation solvers (see STATICS): skyline, sparse, mumps in the context of a single domain, and spooles.
Furthermore, this method is currently supported only when applied to all
constraints: in other words, it cannot be combined with another method
for enforcing constraints.
METHOD
| Specified default method for enforcing constraints (characters). This specified method can be overruled in the CONTACTSURFACES, MATERIAL, LMPC, NODALCONTACT, and TIEDSURFACES commands.
|
multipliers
| In this case, which is also the default case, AERO-S uses the Lagrange multiplier method for enforcing all constraints associated with the LMPC, NODALCONTACT,
CONTACTSURFACES, and TIEDSURFACES commands, and with joint and rigid elements (see TOPOLOGY). Warning: before relying on this default value of METHOD, the user should read above the notes describing
the scope of the Lagrange multiplier method.
|
elimination [factol [lhstol [rhstol]]]
| In this case, AERO-S uses an elimination method for enforcing all constraints associated with the
commands LMPC and TIEDSURFACES, and with joint and rigid elements (see TOPOLOGY). This method can be
configured with the following three parameters:
factol. This parameter is a tolerance used in the factorization of the constraint Jacobian matrix to define a
zero pivot as a pivot whose absolute value is less or equal to factol  |maxdiagcoeff|, where
is the machine precision and maxdiagcoeff is the largest diagonal
coefficient of the matrix.
Note that the factorization is performed only to compute the
Reduced Row Echelon Form (RREF) of the linearized constraint
equations if these equations cannot be arranged in such a form by
simply permuting the rows and/or columns of the constraint
Jacobian matrix. The factorization method is QR if
AERO-S is configured with the C++ template library for linear algebra Eigen 3, or the Gauss-Jordan elimination
method otherwise. The default value of this parameter is |maxdiagcoeff|, where
is the machine precision and maxdiagcoeff is the largest diagonal
coefficient of the matrix.
Note that the factorization is performed only to compute the
Reduced Row Echelon Form (RREF) of the linearized constraint
equations if these equations cannot be arranged in such a form by
simply permuting the rows and/or columns of the constraint
Jacobian matrix. The factorization method is QR if
AERO-S is configured with the C++ template library for linear algebra Eigen 3, or the Gauss-Jordan elimination
method otherwise. The default value of this parameter is  . .
lhstol. This parameter is another tolerance used to set to zero any coefficient of the left hand side of the
RREF of the linearized constraint equations that is smaller than lhstol  , where
is the machine
precision. The sparsity of this matrix is important for
computational efficiency. The default value of this parameter is . , where
is the machine
precision. The sparsity of this matrix is important for
computational efficiency. The default value of this parameter is .
rhstol. This parameter is yet another tolerance used to set to zero any coefficient of the right hand side of
the RREF of the linearized constraint equations that is smaller than rhstol , where is
the machine precision. The default value of this parameter is  . .
This method is particularly efficient when MORTAR_TYPE in TIEDSURFACES is set to  (AERO-S's
dual mortar method) because in this case the constraint equations are constructed in RREF. (AERO-S's
dual mortar method) because in this case the constraint equations are constructed in RREF.
|
penalty beta
| In this case, AERO-S uses the penalty method for enforcing all constraints associated with the LMPC, NODALCONTACT, CONTACTSURFACES, and TIEDSURFACES commands,
and with joint and rigid elements (see TOPOLOGY). The parameter beta should be a large positive number, typically of the order of  (no default value is provided). (no default value is provided).
|
augmented beta
| In this case, AERO-S uses the augmented Lagrangian method for enforcing all constraints associated with the LMPC, NODALCONTACT, CONTACTSURFACES, and TIEDSURFACES commands,
and with joint and rigid elements (see TOPOLOGY). The parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
27 CONSTRUCTING A REDUCED MESH
The RMSHC command can be used to:
- Construct a reduced mesh (or a series of them, when considering
local Reduced-Order Bases (ROB)s for nonlinear model reduction) that can
be used for effectively hyper reducing a discrete
reduced-order model, by sampling the mesh described in this ASCII Input
Command Data file using:
- A single global ROB or a set of local ROBs.
- One or more specified dual ROBs for the solution of a class of constrained problems (see below for limitations).
- Training solutions specified on a single or multiple meshes from which training forces can be constructed.
- A non-negative least-squares algorithm.
After a reduced mesh is constructed, the trace on this mesh of the
corresponding training ROB is computed and outputted, if SAMPLMSH is specified under OUTPUT.
- Update the coordinates of previously constructed reduced meshes
in order to enable their reuse in parametric shape studies when the
topology of the high-dimensional meshes is maintained constant.
In this case:
- The coordinates specified in the ASCII Input Command Data file are the updated coordinates.
- The element weights of a previously computed reduced mesh must be inputted in this file using ATTRIBUTES in order to specify the desired reduced mesh.
- The sole purpose of this command becomes that of
outputting the updated reduced mesh file and therefore many aspects of
this command become irrelevant.
- Pre-compute any reduced-order terms and/or operators that
are constant, and therefore do not necessitate hyper reduction, are
required by a subsequent simulation based on a hyper reduced
projection-based reduced order model,
and whose associated AERO-S commands are included in the ASCII Input Command Data file. Specifically:
- Reduced-order displacement and/or velocity initial conditions, in the presence of IDISPLACEMENTS and/or IVELOCITIES in the input file.
- The reduced-order mass matrix, when the ROB is not mass-orthonormalized (see READMODE).
- Reduced-order external, constant (non-follower) forces, in the presence of FORCES and/or GRAVITY in the input file.
- Reduced-order linear multipoint constraints, in the presence of LMPC in the input file.
- Hyper reduce offline high-dimensional, non zero, initial
displacement and/or velocity condition(s) specified in the same input
file containing this command — which can be
desired or required. The latter scenario occurs when only the trace of
the ROB on the dofs of the reduced mesh is available – for example, when
the ROB is randomized.
The computed or updated reduced meshes, the traces of the training
ROBs on these meshes, the constant reduced-order information mentioned
above, and the offline hyper reduced initial
conditions can be outputted using SAMPLMSH in OUTPUT.
Note 1: Currently, this command is not connected to READROB and consequently, it cannot select any ROB inputted via READMODE
to perform any of the tasks
it is designed to accomplish. Instead, it selects one of the two
instances of a same ROB – namely, the orthonormalized instance or
mass-orthonormalized instance –
computed using the ROBC command and outputted when ROBDATAF is specified as a result in OUTPUT, as follows:
- If the time-integration scheme specified in DYNAMICS is of the explicit type, this command selects the mass-orthonormalized ROB instance for its assigned task,
regardless of the setting of the
flag_mnb flag (see below the USE_MNB keyword).
- If the time-integration scheme is of the implicit type – which this command assumes by default – and the
flag_mnb flag is set below to On
(see below the USE_MNB keyword), this command also selects the mass-orthonormalized ROB instance for its assigned task.
- On the other hand, if the time-integration scheme is of the implicit type and
flag_mnb is set to Off (see below the USE_MNB keyword), this command
selects orthonormalized ROB instance for its assigned task.
Note 2: By default:
- The reduced inertia forces associated with a linear structural
dynamics problem and the component of the reduced inertia forces
associated with a constant mass matrix in a nonlinear structural
dynamics problem are
not hyper reduced. This is because the part of these reduced forces
whose computational complexity scales with the size of the
high-dimensional model can be (and is automatically) precomputed
efficiently.
- In a nonlinear structural dynamics problem, the component of
the reduced inertia forces associated with a configuration-dependent
mass matrix is automatically hyper reduced.
For eigen analysis, which can currently be performed using a reduced or hyper reduced computational model only external to AERO-S,
the reduced inertia forces — and more specifically, the reduced mass
matrix – may need to be
hyper reduced for accuracy and/or computational efficiency reasons. In
this case, the user should pay attention to the settings of the keywords
USE_CMF and USE_STR.
Note 3: When the finite element model to be hyper reduced contains rotational degrees of freedom, the DYNAMICS
command
and the part of its input that identifies the time-integrator previously
chosen for constructing the discrete reduced-order model
to be hyper reduced must be included in the ASCII Input Command Data
file.
Note 4: If the mesh sampling is to be trained also with the inertia forces, the velocity and acceleration snapshots must be
provided using the TRNSOL sub-command keyword described below.
Note 5: Repeating within this command the pair of sub-command keywords (PODROB, TRNSOL) times,
while using the same single instance of each other sub-command keyword, enables the construction
of hyper reduced meshes, one for each ROB specified in PODROB — for example, for equipping
a suite of local ROBs with associated reduced meshes.
Note 6: Currently, model reduction of linear or nonlinear
problems with equality or inequality constraints is supported only
for implicit dynamics, and for those cases where such constraints are
linear — that is, for those cases where such constraints arise
from:
- NODALCONTACT with
mode_v = 1 or mode_v = 3.
- LMPC with
mode_v = 1.
- Constraint function elements with
mode_v = 1 (see TOPOLOGY).
Note 7: In such cases, snapshot collection for the construction of a dual basis can be performed only when the constraint
method (see CONSTRAINTS) is chosen to be:
multipliers equipped with the FETI DP solver (see STATICS).
augmented equipped with the parallel mumps solver (see STATICS).
Note 8: This command can be executed in parallel when the problem of interest is constraint-free, and model reduction is
performed using a global ROB. In this case, the mesh sampling task is parallelized if the command DECOMPOSE is used to partition the mesh
associated with the finite element model of interest, or executed from the command line (see DECOMPOSE) to request mesh partitioning or provide aeros a
previously computed mesh partition. In particular, the TRIVIAL decomposition algorithm (see DECOMPOSE) is recommended for this purpose.
PODROB <pathandfilename1> dimlrb
DUALBASIS <pathandfilename2> dimldb
TRNSOL <pathandfilename3>
TRNSOL <pathandfilename3> <pathandfilename4>
TRNSOL <pathandfilename3> <pathandfilename4> <pathandfilename5>
DIMENS dimens
SAMFRQ samfrq
EXTFOL flag_ext
SOLVER solver_type
TOLERA tolera
USE_MNB flag_mnb
USE_CMF flag_cmf
USE_ICO flag_ico
USE_STR flag_str
POSCFG
x_scale_factor1 y_scale_factor1 z_scale_factor1
[<pathandfilename1_1> <pathandfilename1_2> ... <pathandfilename1_M>]
x_scale_factor2 y_scale_factor2 z_scale_factor2
[<pathandfilename2_1> <pathandfilename2_2> ... <pathandfilename2_M>]
.
.
.
x_scale_factorN y_scale_factorN z_scale_factorN
[<pathandfilenameN_1> <pathandfilenameN_2> ... <pathandfilenameN_M>]
NDSCFG
nodalcoordinates1
[<pathandfilename1_1> <pathandfilename1_2> ... <pathandfilename1_M>]
nodalcoordinates2
[<pathandfilename2_1> <pathandfilename2_2> ... <pathandfilename2_M>]
.
.
.
nodalcoordinatesN
[<pathandfilenameN_1> <pathandfilenameN_2> ... <pathandfilenameN_M>]
|
PODROB
| Sub-command keyword to specify a path and filename for the binary file containing a local or global basis (see ROBC)
 (characters). (characters).
|
<pathandfilename1>
| Path and filename of the binary file containing the (primal) basis (characters).
|
dimlrb
| Specifies the first dimlrb columns of the basis stored in <pathandfilename1> as the ROB for training
(integer). If the basis is not a local one (see ROBC), this parameter should be ignored and the dimension of
the training ROB should be specified instead in dimens (see below).
|
DUALBASIS
| Sub-command keyword for activating reading and using a precomputed dual basis  , in order to precompute
the reduced constraint matrix , in order to precompute
the reduced constraint matrix  for a class of constrained problems identified above, using the methods
and algorithms also identified above, and outputting this reduced matrix in the
reduced mesh file outputted itself in for a class of constrained problems identified above, using the methods
and algorithms also identified above, and outputting this reduced matrix in the
reduced mesh file outputted itself in SAMPLMSH (see OUTPUT) (characters).
|
<pathandfilename2>
| Name of the binary file (including path, if needed) containing the dual ROB to be read (characters). This file is
relevant only for the solution of the class of constrained problems identified above, using the methods and algorithms
also identified above. It is generated by the command ROBC and is readable by this command. Note that currently,
this ROB cannot be a local dual ROB, but only a global dual ROB.
|
dimldb
| Specifies the first dimldb columns of the dual basis stored in <pathandfilename2> as the ROB for training
(integer).
|
TRNSOL
| Sub-command keyword to specify a path and filename for the binary file containing the training solutions needed for
building the training force vectors (characters).
|
<pathandfilename3>
| Path and filename of the binary file containing solution snapshots needed for building training force vectors
(characters).
|
<pathandfilename4>
| Path and filename of the binary file containing velocity solution snapshots for building training force vectors
(characters). The corresponding option is recommended when the finite element model has rotational degrees of freedom,
regardless of whether the time-integrator is explict or implicit.
|
<pathandfilename5>
| Path and filename of the binary file containing acceleration solution snapshots for building training force vectors
(characters). The corresponding option is recommended when the finite element model has rotational degrees of freedom,
and the time-integrator is implicit.
|
DIMENS
| Sub-command keyword to specify the dimension of the basis stored in <pathandfilename1>, when this basis is not
a local one (see ROBC) (characters).
|
dimens
| Specifies the first dimens columns of the non-local basis stored in <pathandfilename1> as the ROB for
training (integer).
|
SAMFRQ
| Sub-command keyword to specify a sampling frequency for the inputted solution snapshots (characters).
|
samfrq
| Specifies using every samfrq-th solution snapshot for building the training force vectors (integer).
|
EXTFOL
| By default, the training force vectors are the internal force vectors. However, this sub-command keyword can be used to
define the training force vectors as the union of the internal and external follower (see PRESSURE) force vectors.
|
flag_ext
|
On
| In this case, the training force vectors are defined as the union of the internal and external follower
(see PRESSURE)
force vectors.
|
Off
| In this case, the training force vectors are defined as the internal force vectors only.
|
SOLVER
| Sub-command keyword to specify the method for computing the reduced mesh and its elements weights (characters).
|
solver_type
| Specifies the method for computing the reduced mesh and its elements weights (characters). Five choices are available:
|
nnlsqr
| Specifies the Lawson and Hanson Non-Negative Least-Squares (NNLS) method based on the QR factorization algorithm. If a mesh
partition is also specified (see DECOMPOSE), this method is executed in parallel using this mesh partition and
the ScaLAPACK and MPI libraries. This is the default method for computing the reduced mesh and its elements weights.
|
nnlscg
| Specifies the Lawson and Hanson Non-Negative Least-Squares (NNLS) method based on the CG algorithm. If a mesh partition is
also specified (see DECOMPOSE), this method is executed in parallel using this mesh partition and the MPI library.
This method is also known in the literature as the Non-Negative Conjugate Gradient Pursuit method.
|
pfpqr
| Specifies the polytope faces pursuit method based on the QR factorization algorithm. If a mesh partition is also specified (see DECOMPOSE),
this method is executed in parallel using this mesh partition and the ScaLAPACK and MPI libraries.
|
pfpcg
| Specifies the polytope faces pursuit method based on the CG algorithm. If a mesh partition is also specified (see DECOMPOSE),
this method is executed in parallel using this mesh partition and the MPI library.
|
lassocg
| Specifies the Least Absolute
Shrinkage and Selection Operator (LASSO) method based on the CG
algorithm. If a mesh partition is also specified
(see DECOMPOSE), this method is executed in parallel using this mesh partition and the MPI library.
|
TOLERA
| Sub-command keyword to specify a tolerance for controlling the error in energy conservation due to mesh sampling
(characters).
|
tolera
| Tolerance for controlling the error in energy conservation due to mesh sampling. For example, tolera = 0.01 means
that 99 % of the energy associated with the training force vectors and the ROB is conserved on the reduced mesh (real).
|
USE_MNB
| Sub-command keyword to specify that the inputted ROB is mass-orthonormalized (characters).
|
flag_mnb
| Flag for specifying which available ROB instance to select for the assigned task (characters).
|
On
| In this case, this command selects the mass-orthonormalized ROB instance for the assigned task (characters).
|
Off
| In this case, this command selects the orthonormalized ROB instance for the assigned task (characters).
|
USE_CMF
| Sub-command keyword to specify
whether to include or not the reduced inertia forces associated with a
constant mass matrix in the training of ECSW (characters).
|
flag_cmf
| Flag for specifying whether to
include or not the reduced inertia forces associated with a constant
mass matrix in the training of ECSW (characters).
|
On
| In this case, the reduced
inertia forces associated with a constant mass matrix are included in
the ECSW training procedure, which implies the intent
to hyperreduce the reduced-order mass matrix. Consequently, in
this case, the reduced-order mass matrix is neither computed within the
scope of this command nor stored in the file
<PATHANDFILENAME>.elementmesh.inc if SAMPLMSH is specified as an output result under OUTPUT.
|
Off
| In this case, the reduced
inertia forces associated with a constant mass matrix are excluded from
the ECSW training procedure, which implies the intent
to pre-compute rather than hyperreduce the reduced-order mass
matrix. Consequently and unless the ROB is mass-orthonormal, the reduced-order mass matrix is pre-computed in this case within the scope of this
command and stored in the file <PATHANDFILENAME>.elementmesh.inc if SAMPLMSH is specified as an output result under OUTPUT.
Warning: currently, AERO-S does not support a mechanism for suppressing the output of the reduced-order mass matrix when flag_cmf is set to Off and the ROB is not mass-orthonormal.
|
USE_ICO
| Sub-command keyword to specify
whether to hyper reduce or not any high-dimensional initial displacement
and/or velocity condition(s) specified in the same ASCII Input Command
Data file
as this command – and therefore whether to include or not
this/these initial condition(s) in the training of ECSW (characters).
|
flag_ico
| Flag for specifying whether to include or not the aforementioned initial condition(s) in the training of ECSW (characters).
|
On
| In this case, the aforementioned initial condition(s) are included in the ECSW training procedure.
|
Off
| In this case, the aforementioned initial condition(s) are not included in the ECSW training procedure.
|
USE_STR
| This sub-command keyword is relevant only if flag_cmf and/or flag_ico are/is set to On. It should be used to specify how to train ECSW for the reduced inertia forces
associated with a constant mass matrix and/or any specified high-dimensional initial conditions (characters).
|
flag_str
| Flag for setting how to train
ECSW for the reduced inertia forces associated with a constant mass
matrix and/or any specified high-dimensional initial conditions
(characters).
|
On
| In this case, the contributions
to the ECSW training procedure of the reduced inertia forces associated
with a constant mass matrix and/or any specified high-dimensional
initial conditions
are stacked with those of all other reduced forces to be hyper
reduced, in order to achieve accuracy for each individual hyper
reduction. This setting is strongly recommended for EIGEN and
DYNAMICS analyses in the context of the
nonparametric probabilistic method for uncertainty quantification,
because: in the first case, the reduced mass and stiffness matrices must
be accurately hyper reduced; and
in the second case, any specified non zero high-dimensional
initial condition(s) must by accurately hyper reduced.
|
Off
| In this case, the contributions
to the ECSW training procedure of the reduced inertia forces associated
with a constant mass matrix and/or any specified high-dimensional
initial conditions
are added to the contributions of all other reduced forces to be
hyper reduced, in order to achieve accuracy for the hyper reduction of
the balance of all aforementioned terms. This setting is
recommended for transient DYNAMICS analysis, when no high-dimensional initial condition requires hyper reduction.
|
POSCFG
| Sub-command keyword to specify
that the collected training snapshots were computed on different meshes
that share however the same connectivity — that is, on meshes
that have different position configurations — and whose nodal
coordinates differ only by scaling factors in the  , ,  , and , and  directions.
These scaling factors are defined with respect to the nodal coordinates specified under the NODES command of this ASCII Input Command Data file.
Note that even if a single common ROB is assigned to all specified different meshes, using the directions.
These scaling factors are defined with respect to the nodal coordinates specified under the NODES command of this ASCII Input Command Data file.
Note that even if a single common ROB is assigned to all specified different meshes, using the POSCFG sub-command keyword requires that this ROB go first through a clustering
process using the ROBC command configured with the DO_CLUSTERING sub-command keyword and nclusters = 1, in order for AERO-S to build the association between
a snapshot and the mesh on which it was computed.
|
x_scale_factori
| -coordinate scale factor for the i-th mesh and the case where the collected training snapshots were computed on different meshes (real).
|
y_scale_factorj
| -coordinate scale factor for the j-th mesh and the case where the collected training snapshots were computed on different meshes (real).
|
z_scale_factork
| -coordinate scale factor for the k-th mesh and the case where the collected training snapshots were computed on different meshes (real).
|
<pathandfilenamei_j>
| Name of the optional binary file (including path, if needed) containing (characters):
- The
j-th mass-orthonormalized local ROB computed on the i-th mesh, when model reduction is to be based on local ROBs.
- The global mass-orthonormalized ROB computed on the
i-th mesh, otherwise.
Note that this optional entry should be omitted (for the sake of
computational efficiency) when the training on different meshes is to be
performed using orthonormal ROBs. Note also that
the aforementioned ROBs can be efficiently constructed using the COMPRESS sub-command of the ROBC command (instead of performing SVD multiple times using different mass metrics).
|
NDSCFG
| Sub-command keyword to specify
that the collected training snapshots were computed on different meshes
that share however the same connectivity — that is, on meshes
that have different position configurations — and whose nodal
coordinates differ by an arbitrary manner. Note that even if a single
common ROB is assigned to all specified different meshes, using the
NDSCFG sub-command keyword requires that this ROB go first through a clustering process using the ROBC command configured with the DO_CLUSTERING sub-command keyword and nclusters = 1,
in order for AERO-S to build the association between a snapshot and the mesh on which it was computed.
|
nodalcoordinatesi
| Name of the binary file (including path, if needed) containing the nodal coordinates of the i-th mesh.
|
28 CONTACT SURFACES
|
Command Statement: CONTACTSURFACES
|
The CONTACTSURFACES command can be used to enforce contact laws between pairs of surfaces
defined using the command SURFACETOPO, for static and dynamic analyses only. Surface interactions are detected
using the search module of the library ACME. For explicit computations, the discrete kinematic constraint equations
are defined and enforced as specified in the sub-command keyword TDENFORCE and its associated
flag flagTDENFORCE of the DYNAMICS object. For implicit computations, the discrete kinematic constraint equations are formulated using AERO-S's
mortar method and enforced using the method specified in CONSTRAINTS or in CONSTRAINT_METHOD
below with the following limitation:
in this case, the enforcement method can be only one of the following
three methods: the penalty method, the Lagrange multiplier method, or
the
augmented Lagrange multiplier method.
Note 1: In general, the master surface should be chosen as that
with the coarser discretization. Setting the master and slave contact
surfaces to the same surface activates the numerical treatment of
self-contact.
Note 2: For explicit dynamic computations performed with the flag TDENFORCE set to On (see DYNAMICS),
the
contact forces can be computed using one of the following four
enforcement models: frictionless (default), constant friction,
velocity-dependent friction, and pressure-dependent friction. For all
other computations (for example, for explicit dynamic
computations performed with the flag TDENFORCE set to Off, implicit dynamic or static computations) only the
frictionless model is supported.
Note 3: The enforcement of contact surface constraints by the Lagrange multiplier method in static and implicit dynamic analyses
is supported only by the FETI-DP family of solvers.
Note 4: The enforcement of contact surface constraints by the elimination method is not supported.
Note 5: For contact detection and enforcement, a surface
is treated as 2-sided (or “shell” surface) when both of the following
conditions are
met: (a) the simulation is explicit dynamics with flagTDENFORCE set to On in DYNAMICS (or omitted since this is the default setting),
and (b) a surface thickness attribute is specified under SURFACETOPO.
In all other cases, the contact detection and enforcement is 1-sided.
For a 1-sided surface, the directions of the normals to the faces of the
surface are important. Contact interactions between two 1-sided
surfaces, or self-contact
involving one 1-sided surface, can only be detected between two faces
with normals in opposite directions. Furthermore, if an interaction is
detected,
the directions of the normals establish whether the configuration
involves penetration or separation. For a 2-sided surface, the
directions of the normals of
the faces of the surface are not important. Contact interactions between
two 2-sided surfaces, or self-contact involving one 2-sided surface,
can be detected
between two faces regardless of the directions of the normals. For
contact between one 2-sided surface and one 1-sided surface, only the
normal direction of
the 1-sided surface is important. If an interaction is detected, the
direction of the normal of the 1-sided surface establishes whether the
configuration involves
penetration or separation.
For a static or implicit dynamic computation, or for an explicit dynamic computation with the flag flagTDENFORCE set to Off (see DYNAMICS)
SURF_PAIR_ID# MASTER SLAVE MORTAR_TYPE NORMAL_TOL TANGENTIAL_TOL CONSTRAINT_METHOD
|
For an explicit dynamic computation with the flag flagTDENFORCE set to On (see DYNAMICS) and a frictionless model
SURF_PAIR_ID# MASTER SLAVE KPART_TYPE NORMAL_TOL TANGENTIAL_TOL NUM_ITER CONVERG_TOL CONSTRAINT_METHOD
|
For an explicit dynamic computation with the flag flagTDENFORCE set to On (see DYNAMICS) and a constant friction model
SURF_PAIR_ID# MASTER SLAVE KPART_TYPE NORMAL_TOL TANGENTIAL_TOL NUM_ITER CONVERG_TOL FRIC_COEF CONSTRAINT_METHOD
|
For an explicit dynamic computation with the flag flagTDENFORCE set to On (see DYNAMICS) and a velocity dependent friction contact model
SURF_PAIR_ID# MASTER SLAVE KPART_TYPE NORMAL_TOL TANGENTIAL_TOL NUM_ITER CONVERG_TOL STATIC_COEF DYNAMIC_COEF VELOCITY_DECAY CONSTRAINT_METHOD
|
For and explicit dynamic computation with the flag flagTDENFORCE set to On (see DYNAMICS) and a pressure-dependent friction contact model
SURF_PAIR_ID# MASTER SLAVE KPART_TYPE NORMAL_TOL TANGENTIAL_TOL NUM_ITER CONVERG_TOL FRIC_COEF REF_PRES OFFSET_PRES PRES_EXP CONSTRAINT_METHOD
|
SURF_PAIR_ID#
| Id number of the surface pair to be described (integer).
|
MASTER
| Identification of the master (mortar method) surface (see SURFACETOPO) (integer).
|
SLAVE
| Identification of the slave (mortar method) surface (see SURFACETOPO) (integer).
|
CONSTRAINT_METHOD
| Method for enforcing the associated constraints (characters). The default method is set in CONSTRAINTS and used whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
penalty beta
| The penalty method. The parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
augmented beta
| The augmented Lagrangian method. The parameter beta should be a large positive number, typically of the order of (no default value is provided). If penetration occurs, the value
of beta should be increased and the value of the computational time-step specified in DYNAMICS decreased.
|
MORTAR_TYPE
| Mortar type: 0 = standard, 1 = dual, default value is 0 (integer).
|
NORMAL_TOL
| Normal search tolerance used by ACME
to identify interactions. The default value is 0.1 (float) (see Figs.
1.2 and 1.3 in
Section 1.3 of ACME's User Reference Manual). This tolerance
should be larger than the maximum relative displacement occurred during
one load step of a static simulation or one time-step of
a dynamic one. If penetration occurs, the value of this
parameter should be increased. For a surface with a surface
thickness value, the normal tolerance is defined w.r.t. the
position/s of the “lofted” surface/s. For a 1-sided surface, this is the
position of the surface + 0.5*surface thickness in
the direction of the normal. For a 2-sided surface, these
are the positions of the surface +/- 0.5*surface thickness. The normal
tolerance must be greater than the distance that a point on the contact
surface can move in one time/load step. Therefore, a larger
computational time/load step calls for a larger normal tolerance. For
contact between two 2-sided surfaces, the normal
tolerance must be less than the sum of the two surface
thickness values. Also, for self-contact of a 2-sided surface, the
normal tolerance must be less than twice the surface thickness value.
Even for contact
involving one or more 1-sided surfaces, there may be certain
cases where it would be appropriate to limit the normal tolerance in
order to prevent particular configurations from being treated as
penetration.
Increasing the normal tolerance will make the contact
detection more robust, provided the aforementioned upper limits are
respected. However, it also makes the simulation more expensive.
|
TANGENTIAL_TOL
| Tangential search tolerance used by ACME
to identify interactions. The default value is 0.001 (float) (see Figs.
1.2 and 1.3 in Section 1.3 of ACME's User Reference Manual). If
penetration occurs, this tolerance
should be increased, in which case the simulation should be
expected to become slower. The value of this parameter should be neither
too small nor too large. A value corresponding to a small percentage
(between 0.5%
and 50%) of the minimum edge length of the face elements is
suggested.
|
KPART_TYPE
| In ACME, kinematic partitioning pertains to determining the fraction  of the total momentum to be absorbed by each surface of a pair of surfaces in contact. If surface 1 is in contact with
surface 2 and the kinematic partitioning fraction for surface 1 is of the total momentum to be absorbed by each surface of a pair of surfaces in contact. If surface 1 is in contact with
surface 2 and the kinematic partitioning fraction for surface 1 is  , it is , it is  for surface 2. One specific value of the kinematic partitioning factor for surface 2. One specific value of the kinematic partitioning factor  can be inputted to can be inputted to ACME (see below), or
this factor can be automatically computed by ACME for each contact interaction as follows
 where
where  , ,  , is the kinematic partitioning fraction for surface , , is the kinematic partitioning fraction for surface ,  is the density at a given node of this surface, and is the density at a given node of this surface, and  is the speed of sound in the material of which this surface is made.
Setting is the speed of sound in the material of which this surface is made.
Setting KPART_TYPE to 0 specifies  for the slave surface (see for the slave surface (see SLAVE) and  for the master surface (see for the master surface (see MASTER). Setting KPART_TYPE to 1 specifies that and  are to be
automatically computed by are to be
automatically computed by ACME as outlined above. The default value of KPART_TYPE is 0 (integer).
|
NUM_ITER
| Maximum number of predictor-corrector iterations to be performed at each time step. The default value is 5 (integer).
|
CONVERG_TOL
| Convergence tolerance of the predictor-corrector iteration loop. The default value is 1.0e-10 (float).
|
FRIC_COEF
| Friction coefficient (float).
|
STATIC_COEF
| Static friction coefficient (float).
|
DYANAMIC_COEF
| Dynamic friction coefficient (float).
|
VELOCITY_DECAY
| Velocity decay parameter (float).
|
REF_PRES
| Reference pressure (float).
|
OFFSET_PRES
| Offset pressure (float).
|
PRES_EXP
| Pressure exponent (float).
|
29 CONTROL STATEMENT
|
Command Statement: CONTROL
|
AERO-S always generates a performance file named FNAME.timing which reports on the complexity, memory,
and CPU resources associated with the performed computation. By default, the prefix FNAME is set to the name of
the AERO-S input file (AERO-S also outputs some of these performance results on the screen).
This optional command statement can be used to reset the value of the prefix FNAME. This prefix is also used by
AERO-S, when executed with the “-t” (or “-T”) option, to name the ASCII output file (FNAME.top)
containing the geometry of the performed computation in the XPost format. It is also used by AERO-S
for outputting, when requested, a number of domain decomposition (or mesh partitioning) files (see DECOMPOSE).
Currently, this command is also needed for specifying the type of analysis to be performed by AERO-S.
For this reason, it features the entry ANATYPE described below. For parsing reasons, ANATYPE must be specified
whenever the CONTROL command is included in the input file, even this entry is not needed.
FNAME
ANATYPE
NODESET
ELEMSET
|
FNAME
| Prefix of the names of the files
reporting on the performance, geometry, and mesh decomposition of the
performed computation, when applicable. The default value,
which is applicable when this optional command is entirely
skipped, is the name of the AERO-S input file.
|
ANATYPE
| Analysis type identifier (integer). It is needed for any thermal (heat conduction) analysis involving radiation,
in which case it must be set to 2. Otherwise, this parameter should be set to 1.
|
NODESET
| Name of the node set describing the grid points of the geometry of the computation in the file FNAME.top outputted
in the XPost format, when AERO-S is executed with the “-t” (or “-T”) option. The default name is “nodes”.
|
ELEMSET
| Name of the element set describing the connectivity of the geometry of the computation in the file FNAME.top outputted in the XPost format, when AERO-S is executed with the “-t” (or “-T”) option. The default name is “elems”.
|
30 CONWEP
|
Command Statement: CONWEP
|
The CONWEP command statement is used to define, in conjunction with the PRESSURE command, a pressure load due to air blast in the free field using the software module CONWEP.
More specifically, the CONWEP command is used to specify the position of the charge, its mass, and the detonation time.
The PRESSURE command is used to specify those elements of the finite element model on which to apply the generated pressure load.
The input format of this command is given below.
XCHARGE YCHARGE ZCHARGE MCHARGE DTIME
|
XCHARGE
| x-ordinate of the charge (real).
|
YCHARGE
| y-ordinate of the charge (real).
|
ZCHARGE
| z-ordinate of the charge (real).
|
MCHARGE
| Mass of the explosive charge (real).
|
DTIME
| Time at which the charge is detonated (real).
|
31 DENSITY-TEMPERATURE TABLE
The DCTT command can be used to describe, for a
given material, the evolution of the mass density with temperature. This
evolution can be
specified here in a curve (or one-dimensional table) defined by pairs of
density and temperature values. Linear interpolation is used for "in
between" points,
and the extrema values are adopted for "outside" points. Several curves
can be specified, one after the other. Each curve is identified by an
ID number as described below.
Note 1: Currently, this command is supported only by the 4-noded tetrahedral termal element (type 50).
CURVE | curve_id
| T_1 | 
| | . |
| | . |
| | . |
| T_n | 
|
|
CURVE
| Sub-command keyword (characters) that signals the definition of a density-temperature curve (or one-dimensional table).
|
curve_id
| ID number for the following curve (or one-dimensional table) (integer).
|
T_i
| A specified temperature value (real).
|
| A specified mass density value at temperature T_i (real).
|
32 DISCRETE NODAL MASS AND INERTIA
|
Command Statement: DIMASS
|
The command DIMASS is used to lump a discrete mass or inertia on a specified degree of freedom attached to a specified
node, either for a diagonal contribution to the mass matrix or an off-diagonal one. If a node number appears more than
once under this command with the same degree of freedom (or pair of degrees of freedom), AERO-S sums all the lumped masses at
the implied entries of the mass matrix. If a gravity field is also specified in the input file using the command GRAVITY, AERO-S generates
at each specified translational degree of freedom at each specified node under this command a weight-force component
equal to the product of the specified discrete mass and specified gravity acceleration in the corresponding
direction.
Note 1: All degrees of freedom referred to by this command are
defined in the nodal degree of freedom reference frames defined at the
nodes
where these degrees of freedom are attached (see NODES and NFRAMES), using the usual local numbering convention. By default, the nodal degree of freedom
reference frames are the same as the global reference frame.
The input format is given below.
or
NODE#
| Node number where the mass or inertia will be added (integer).
|
DOF#
| Degree of freedom for which the mass or inertia will contribute a diagonal entry to the mass matrix (integer).
|
VALUE
| Value of the prescribed discrete mass or inertia (float).
|
DOF1#
| Degree of freedom for which the
specified mass or inertia will contribute an off-diagonal entry (and its
symmetric counterpart) to the mass matrix at the location implied by
this degree of freedom
and that specified in DOF2# (integer). Note that only the contribution to the lower triangular part of the mass matrix should be specified, and therefore DOF1# should be greater
than DOF2#. Note also that for an explicit time-integration scheme or when the mass is requested to be LUMPED, this contribution will be part of the lumping process.
|
DOF2#
| Degree of freedom for which the
mass or inertia will contribute an off-diagonal entry (and its symmetric
counterpart) to the mass matrix at the location implied by this degree
of freedom
and that specified in DOF1# (integer). Note that only the contribution to the lower triangular part of the mass matrix should be specified, and therefore DOF2# should be smaller
than DOF1#. Note also that for an explicit time-integration scheme or when the mass is requested to be LUMPED, this contribution will be part of the lumping process.
|
If more than one line addressing the same degree of freedom of the same
node are encountered under this command, the effect is the accumulation of the
lumped masses or inertias at this degree of freedom.
33 DYNAMIC ANALYSIS
|
Command Statement: DYNAMICS
|
The DYNAMICS command can be used to:
- Specify a damping model for a structural dynamics system and its parameters.
- Specify a time-integrator for a desired dynamic (transient,
time-domain) structural, acoustic, or thermal (heat transfer) analysis
and relevant parameters.
- Specify a linear or nonlinear (see also FLOATINGFRAME)
modal superposition analysis method for a desired dynamic (transient,
time-domain) structural or thermal (heat transfer) analysis
and relevant parameters.
- Specify a computational approach for enforcing a class of constraints in explicit dynamic computations.
- Specify some parameters for managing dynamic fluid-structure interaction computations using the tandem AERO-F-AERO-S.
Currently, the following time-integrators are available in AERO-S:
- The implicit generalized method and the explicit central difference method for linear and nonlinear (in this case, the
NONLINEAR command must also be present in the ASCII Input Command Data file) structural dynamic analyses.
- The implicit generalized
method, the explicit central difference method, and the explicit
modified wave equation algorithm for linear, time-domain acoustic
analysis.
- The generalized midpoint family of methods for linear thermal analysis.
- The implicit midpoint rule for nonlinear thermal analysis.
Linear and Nonlinear Structural Dynamic Analyses and Linear Time-Domain Acoustic Analyses
- The implicit generalized method for linear and nonlinear structural dynamic and linear time-domain acoustic analyses enforces the
following equation of equilibrium

where





and for linear problems

Hence, the above equation of equilibrium can also be written as

Given  ,
,  and
and  , the implicit generalized method solves the above equation as follows
, the implicit generalized method solves the above equation as follows



where  .
The Newmark method is obtained by setting
.
The Newmark method is obtained by setting  .
The midpoint rule (also known as the trapezoidal rule for linear systems)
is obtained by setting
.
The midpoint rule (also known as the trapezoidal rule for linear systems)
is obtained by setting  , and
. The classical central difference method is obtained by setting ,
, and
. The classical central difference method is obtained by setting ,
 and .
and .
The Newmark method  is second-order time-accurate if and only if .
For undamped linear systems, it is unconditionally stable if and only if
is second-order time-accurate if and only if .
For undamped linear systems, it is unconditionally stable if and only if
 and
and  .
.
The generalized method is second-order time-accurate if and only if
 .
For undamped systems, it is unconditionally stable for linear problems if and only if
.
For undamped systems, it is unconditionally stable for linear problems if and only if
 and
and  .
It maximizes high-frequency dissipation when
.
It maximizes high-frequency dissipation when

where  is the user-specified high-frequency dissipation
is the user-specified high-frequency dissipation  .
.
- The central difference method for linear and nonlinear structural dynamic and time-domain acoustic analyses implemented in AERO-S
enforces the following equation of equilibrium

where
Given , and , it solves the above equation as follows

This central difference method for linear and nonlinear
structural dynamic and linear time-domain acoustic analyses computes the
acceleration as follows
 For this reason, AERO-S automatically lumps the mass matrix
For this reason, AERO-S automatically lumps the mass matrix  when this method is selected
so that it becomes explicit.
when this method is selected
so that it becomes explicit.
- The explicit modified wave equation method for linear time-domain acoustic analysis implemented in AERO-S
enforces the following equation of equilibrium

where  is the damping matrix associated with a non-absorbing boundary condition when such a condition is imposed,
and
is the damping matrix associated with a non-absorbing boundary condition when such a condition is imposed,
and  is a real-valued parameter.
is a real-valued parameter.
Given  , and , it solves the above equation as follows
, and , it solves the above equation as follows



For  and
and  , the explicit modified wave equation method is fourth-order time-accurate.
For and
, the explicit modified wave equation method is fourth-order time-accurate.
For and  , experience reveals that for many applications, this method delivers an almost
sixth-order time-accuracy. For
, experience reveals that for many applications, this method delivers an almost
sixth-order time-accuracy. For  , the explicit modified wave equation method is second-order time-accurate.
, the explicit modified wave equation method is second-order time-accurate.
Linear Heat Transfer Analysis
Nonlinear Heat Transfer Analysis
Structural Damping
Note that for the purpose of structural dynamic analysis, structural damping can be represented in AERO-S using
two different approaches:
Note 1: Explicit time-integration algorithms are currently not supported for finite element models with rigid elements, massless
and/or moment-of-inertia-less degrees of freedom, or linear multipoint constraints.
Note 2: Whenever an implicit time-integration algorithm is selected, an equation solver must be specified under the STATICS command.
Note 3: For nonlinear thermal analysis (see NONLINEAR), the appropriate midpoint rule algorithm is automatically selected by this command.
Note 4: Currently, the reduction of inequality constraints
such as those associated with contact problems is supported only for
nonlinear implicit structural dynamic computations,
and only for those cases where the constraints are linear and enforced
using the Lagrange multipliers method.
The input format of this command is given below.
IACC
| For both linear and nonlinear
explicit and implicit dynamic computations, the initial acceleration can
be either set to zero, or computed by AERO-S to satisfy equilibrium at
 . The sub-command keyword . The sub-command keyword IACC enables the user to make this choice (characters).
|
flagIACC
| On/Off flag (characters). The default value is On.
|
On
| In this case, the acceleration is automatically initialized by AERO-S to satisfy equilibrium at
. This initialization requires the solution of a linear system of
equations where the left-hand side operator is the mass matrix.
For implicit dynamic computations, the solver specified under STATICS command is used for this purpose.
|
Off
| In this case, the acceleration is automatically initialized by AERO-S to zero.
|
STABLE
| Sub-command keyword for managing
the time-step of a linear or nonlinear, structural dynamic or acoustic
time-integration using the explicit central difference method
(characters).
|
option
| This integer parameter specifies how to manage the computational time-step for an explicit simulation.
|
0
| In this case, the time-step is not managed and the computations are performed using the specified computational time-step
tm (see below).
|
1
| In this case, which is also the default case, AERO-S estimates automatically the critical time-step — that is, the
maximum stability time-step — and multiplies it by the specified coefficient coeff (see below). In the case of the linear explicit central difference method, AERO-S
estimates the critical time-step by computing the largest
eigenvalue of the finite element model using the power method. In the
case of the nonlinear explicit central difference method,
AERO-S estimates the critical time-step by an element-dependent method and updates this estimate every freq time-steps. If the specified computational time-step tm (see below) is larger than the
product of the critical time-step and coeff, this product is used instead for the computation.
|
2
| In this case, AERO-S computes automatically the critical time-step as described above for option
= 1. However in this case,
the explicit computations are performed using a computational
time-step equal to the product of the estimated critical time-step and coeff (see below), regardless of the value of the specified
computational time-step tm (see below).
|
coeff
| Real-valued coefficient for managing the computational time-step (see above). The default value is  . .
|
tol
| Error tolerance for computing
the highest eigenvalue of the finite element model using the power
method (real). The default value is .
|
maxitr
| Maximum number of iterations for
computing the highest eigenvalue of the finite element model using the
power method (integer). The default value is .
|
freq
| Integer parameter specifying the
frequency (every so many time-steps) at which the critical time-step is
re-estimated during nonlinear explicit computations (see above). The
default value is
 . .
|
smsc
| Integer-valued parameter that can be used to activate selective mass scaling. The default value is .
|
0
| In this case, no selective mass scaling is performed.
|
1
| In this case, selective mass
scaling is activated for nonlinear, explicit dynamic computations.
Specifically, if at the start of the simulation the stability time-step
of an element is less
than tm (see below), the element mass matrix of that element is scaled so that its stability time-step is equal to tm.
|
dedt
| Real-valued parameter that can
be used to activate element deletion using a minimum stability time-step
criterion. The default value is
. If at any time the stability time-step of an
element is less than the specified value of this parameter, the
element is deleted. This option is enabled only for nonlinear, explicit
dynamic computations.
|
MODAL
| Sub-command keyword (characters) for:
- Requesting the construction of a linear structural dynamic ROM based on a Reduced-Order Basis (ROB) of the type
eigen — and therefore consisting of mass-orthonormalized eigen vectors — which must be inputted using the first
format of the READMODE command.
- Performing the requested linear structural dynamic analysis using this structural dynamic ROM — which amounts to
performing a linear modal superposition analysis.
As in the case of a dynamic analysis using direct time-integration, the initial
displacement and velocity conditions can be inputted in a generalized coordinates system, the finite element coordinates
system, or both (see IDISPLACEMENTS and IVELOCITIES).
If tt (see below) is set to zero, AERO-S will exit after constructing the requested structural dynamic
ROM.
|
SROM
| Sub-command keyword (characters) for:
- Requesting the construction offline of a structural dynamic ROM based on:
- A primal ROB which must be inputted using the second format of the READMODE command and identified by
rob_id_1 (see below).
- And when applicable, a dual ROB which must be inputted using the second format of the READMODE command
and identified using
rob_id_L+1 (see below).
- Requesting the construction offline of a structural
dynamic ROM for an unrestrained structural system, in a floating
reference frame, based on (see FLOATINGFRAME):
- The rigid body modes of the system, which are automatically computed by AERO-S.
- A (partial) primal ROB associated with the flexible modes of the system, which must be inputted using the second format of the READMODE command
and identified using
rob_id_1 (see below).
- The modal superposition of all aforementioned modes, which is characterized in general by a nonlinear coupling between the rigid and flexible structural modes.
- Performing the requested structural dynamic analysis
online using the constructed structural dynamic ROM. In the case of a
standard ROM, the initial displacement and velocity conditions
can be inputted in a generalized coordinates system, the finite
element coordinates system, or both (see IDISPLACEMENTS and IVELOCITIES)
— that is, as in the case of a dynamic
analysis using direct time-integration. In the case of a
structural dynamic ROM formulated in a floating reference frame, the
initial values of the generalized velocity degrees of freedom (dofs)
associated with the rigid body modes should be specified in FLOATINGFRAME using the
RMIV sub-command keyword and those of the dofs associated with the structural deformation
modes should be specified in IVELOCITIES using the MODAL sub-command keyword.
- Reconstructing the high-dimensional solution offline using RODC, the ROB — or local ROBs — specified in this command via
rob_id_1 —
or rob_id_1, rob_id_2 ... rob_id_L — and inputted in READMODE.
If tt (see below) is set to zero, AERO-S will exit after constructing the requested structural dynamic ROM.
|
rob_id_1
| Integer number identifying the primal structural ROB inputted using READMODE (integer). Its default value is 0. Note
that whereas a mass-orthonormalized primal structural
ROB can be used for both explicit and implicit dynamic
computations using the corresponding SROM, an identity-orthonormalized
primal structural ROB can be used only for implicit dynamic
computations using the corresponding SROM.
|
rob_id_2 ... rob_id_L
| Optional suite of integer
numbers identifying a suite of primal local ROBs, in which case model
reduction based on the method of local ROBs is activated (integers). Note
that
whereas a mass-orthonormalized primal structural ROB can be used
for both explicit and implicit dynamic computations using the
corresponding SROM, an identity-orthonormalized primal
structural ROB can be used only for implicit dynamic computations
using the corresponding SROM.
|
CONTACT
| Optional sub-command keyword
specifying that the following entry pertains to a dual ROB needed for
the reduction of a contact problem (characters).
|
rob_id_L+1
| Optional integer number identifying the dual structural ROB inputted using READMODE (integer). It is needed only for the reduced-order solution of contact problems.
|
TROM
| Sub-command keyword (characters) for:
- Requesting the construction of a linear dynamic thermal (heat transfer) ROM based on an identity-orthogonal POD ROB inputted using READMODE.
- Performing the requested linear dynamic thermal analysis using this linear thermal ROM.
If tt (see below) is set to zero, AERO-S will exit after constructing the requested linear dynamic thermal ROM.
|
MECH or ACOU or HEAT
| The sub-command keyword MECH can be used to request a structural dynamic analysis (characters).
The sub-command keyword ACOU can be used to request a time-domain acoustic analysis (characters).
The sub-command keyword HEAT can be used to request a thermal (heat transfer) analysis (characters).
|
| Newmark coefficient for a second-order system (real). Set and
to specify the explicit central difference method.
|
| Newmark coefficient for a second-order system (real).
|

| Generalized coefficient for a second-order system (real). To obtain the standard Newmark algorithm, set  . The default is . The default is  . .
|

| Generalized coefficient for a second-order system (real). To obtain the standard Newmark algorithm, set  . The default is . The default is  . .
|
| Generalized infinite frequency spectral radius for a second-order system (real).
When this option is used and this coefficient is specified in the range  , , , and are automatically set to , , , and are automatically set to

which results in a second-order unconditionally stable scheme that minimizes low frequency dissipation. The parameter
 can be set to dissipate higher frequencies — which are usually spurious, numerical frequencies — while
minimizing the dissipative side effect of the lower frequencies.
For can be set to dissipate higher frequencies — which are usually spurious, numerical frequencies — while
minimizing the dissipative side effect of the lower frequencies.
For  , the midpoint rule is recovered. Otherwise, the smaller is the value attributed to within
the range , the larger is the set of higher frequencies that are dissipated and the larger is the amount of dissipation
that is introduced for these frequencies. This option is particularly useful for stabilizing dynamic
fluid-structure computations in the presence of constraints or rigid elements, as these introduce infinite frequencies in
the numerical model. In this case, , the midpoint rule is recovered. Otherwise, the smaller is the value attributed to within
the range , the larger is the set of higher frequencies that are dissipated and the larger is the amount of dissipation
that is introduced for these frequencies. This option is particularly useful for stabilizing dynamic
fluid-structure computations in the presence of constraints or rigid elements, as these introduce infinite frequencies in
the numerical model. In this case,  is a recommended value, but the optimal value is problem dependent. is a recommended value, but the optimal value is problem dependent.
|
| For
, the explicit modified wave equation method is fourth-order
time-accurate. Furthermore, for many applications, experience shows that
for
, this method behaves almost like a sixth-order time-accurate scheme.
|
HEAT
| Sub-command keyword which preceds the parameter of the Newmark algorithm for a first-order time-dependent system (characters).
|
| Main parameter of the
generalized trapezoidal family of methods for first-order systems
(real). This parameter must be chosen within  . .
|
TIME
| Sub-command keyword for specifying time-interval parameters (characters).
|
th
| Integration time-step for
thermal analysis (real). This time-step should be put to zero if a
structural dynamic or time-domain acoustic analysis is to be performed.
|
tm
| Integration time-step for a structural dynamic or time-domain acoustic analysis (real).
|
tt
| End of time-interval for
time-integration (real); beginning of time-interval for time-integration
is zero for all types of time-dependent analyses.
|
RAYDAMP
| This sub-command keyword is active only in the context of the option MECH. It is used for specifying global
Rayleigh proportional damping coefficients — that is, Rayleigh
proportional damping coefficients to be applied
to the entire structure (characters). However, these coefficients
are treated as default values as they can be overwritten by
specifying counterpart material- or element-level coefficients in MATERIAL.
|

| Rayleigh damping stiffness coefficient (real). In the nonlinear case, this coefficient is assigned
at each iteration to the initial linearized stiffness matrix and the product of these two quantities, which remains
constant through the nonlinear iterations, constitutes the contribution to the damping term.
|

| Rayleigh damping mass coefficient (real).
|
MODDAMP
| Sub-command keywords for signaling that the following lines specify modal damping ratios (characters).
This option is active only when the sub-commands MECH and MODAL are also specified — that is,
for a dynamic analysis of a mechanical system using modal superposition. If a mode is repeated,
the modal damping ratio values are added for that mode. If both RAYDAMP and MODDAMP commands are
specified, and the keyword MODAL is also specified, then modal damping takes precedence
over Rayleigh damping.
|
MODE#
| Mode ID number (integer).
|
MDV
| Modal damping ratio (also known as modal damping factor and modal  of critical damping and usually denoted by of critical damping and usually denoted by  ) for mode ) for mode MODE# (real).
|
TDENFORCE
| For implicit dynamic computations with TIEDSURFACES and/or CONTACTSURFACES constraints, the discrete kinematic constraint equations are automatically formulated
by AERO-S using its mortar method. In this case, the user can specify in CONSTRAINTS, TIEDSURFACES, or CONTACTSURFACES the penalty, Lagrange multiplier, or augmented
Lagrange multiplier method for enforcing these constraints.
For explicit dynamic computations with TIEDSURFACES and/or CONTACTSURFACES constraints however, the discrete kinematic
constraint equations can be either defined using a node-to-segment approach and enforced using ACME's enforcement module,
or defined using AERO-S's mortar method and enforced using its penalty method. TDENFORCE is the
sub-command keyword which can be used to choose between either of these two options (characters).
|
flagTDENFORCE
| On/Off flag (characters). The default value is On.
|
On
| In this case, the discrete kinematic constraint equations are defined using a node-to-segment approach and the constraint
forces are computed using ACME's enforcement module.
|
Off
| In this case, the discrete kinematic constraint equations are defined using AERO-S's mortar method and the
constraint forces are computed using its penalty method.
|
maxItrTDENFORCE
| Optional parameter that can be
used to specify the maximum number of outer iterations for contact
enforcement when performed using the library ACME (integer). The default value is 1.
|
tolTDENFORCE
| Optional parameter that can be
used to specify the absolute tolerance for monitoring the convergence of
the outer iterations of the contact enforcement performed by the
library ACME
(real). The default value is 0.
|
tiTDE
| Optional parameter that can be
used to specify the time at which contact detection and enforcement is
activated (real). The default value is 0. This parameter can be used to
speed up execution
time when it can be determined a
priori that no contact will occur during the first part of a
simulation.
|
tfTDE
| Optional parameter that can be
used to specify the time at which contact detection and enforcement is
deactivated (real). The default value is infinity. This parameter can be
used to speed
up execution time when it can be determined a priori that no
contact will occur during the final part of a simulation.
|
IAEROF
| For linear and nonlinear implicit dynamic computations, when flagIACC is set to On and the AERO command is specified in the AERO-S ASCII Input Command Data
file to perform a fluid-structure computation using the tandem AERO-F-AERO-S, the user can request to either ignore or account for the contribution of the initial
aeroelastic forces in the computation of the initial acceleration of the structural subsystem. The sub-command keyword IAEROF enables the user to make this choice (characters).
|
flagIAEROF
| On/Off flag (characters). The default value is Off.
|
On
| In this case, SendInitialForce must be set to True in the ASCII Input Command Data File of AERO-F, in which case the aeroelastic forces are accounted for in the
computation of the initial acceleration of the structural subsystem.
|
Off
| In this case, SendInitialForce must be set to False (or omitted) in the ASCII Input Command Data File of AERO-F and the contribution of the initial aeroelastic
forces is neglected in the computation of the initial acceleration of the structural subsystem.
|
34 EIGENVALUE PROBLEMS
The EIGEN command statement is used to request the construction and solution of a generalized eigenvalue problem of the form

where  and
and  are two finite element square matrices,
are two finite element square matrices,  is the rectangular matrix of generalized eigenvectors, and
is the rectangular matrix of generalized eigenvectors, and  is the diagonal matrix of corresponding eigenvalues.
Currently, only the subspace iteration method (the default choice) and the ARPACK package are available in AERO-S for this purpose.
is the diagonal matrix of corresponding eigenvalues.
Currently, only the subspace iteration method (the default choice) and the ARPACK package are available in AERO-S for this purpose.
The input format of this command is given below. An example input file can be found in FEM.d/fem_examples/Eigen.d.
Note 1: The usage of the EIGEN command requires the simultaneous usage of the STATICS command to specify an equation solver. This solver must be chosen
according to the properties of and (most importantly, watch out for the case where — or in the shifted case  — is singular).
— is singular).
Note 2: When is singular and no shift is specified:
- If the GRBM command is specified in the input file:
- If the
sparse or skyline equation solver is specified under the STATICS command, the set of zero energy modes returned by the EIGEN command is the union of the set of rigid body modes
computed by GRBM, the set of zero energy modes
(mechanisms) determined by the chosen equation solver, and any other
zero energy mode captured only by the eigen solver.
- If a different equation solver is specified under the STATICS command, the set of zero energy modes returned by the
EIGEN command is the union of the set of rigid body modes computed by GRBM
and any other zero energy mode captured only by the eigen solver.
- On the other hand, if only the TRBM command is specified in the input file, the set of zero energy modes returned by the
EIGEN command is the set of zero energy modes computed by the chosen eigen solver.
VERSION
SHIFT
NSBSPV nsbspv
NEIGPA neigpa
TOLEIG toleig
TOLJAC toljac
ARPACK which mode
ARPACK lbound nshifts
ARPACK lbound ubound neigps
MAXITR maxitr
|
VERSION |
|
explicit
| In this case, the matrix is used explicitly when constructing the reduced generalized
eigen problem in the subspace iteration method. Otherwise (default), the reduced generalized eigen
problem is constructed by exploiting some mathematical identities to avoid using explicitly
the matrix which has been factored by then. Note that specifying the explicit
version of the subspace iteration algorithm incurs additional memory storage.
|
SHIFT |
|
|
| Value of a specified shift for the matrix (real).
|
NSBSPV |
|
nsbspv
| In the case of the subspace iteration method (default eigensolver), nsbspv denotes the number of subspace iteration vectors and
should be set to the minimum between twice the number of requested eigen pairs,  neigpa, and neigpa + 8. If rigid body modes are expected,
the previous formula should be increased by the total number of rigid body modes. In the case of ARPACK, nsbspv denotes the number of Krylov vectors (per shift,
if a shifting strategy is used).
|
NEIGPA |
|
neigpa
| Number of requested eigen pairs. If rigid body modes are found, their number is included in the specified value of neigpa.
|
TOLEIG |
|
toleig
| Tolerance for the convergence of the subspace iteration method.
|
TOLJAC |
|
toljac
| Tolerance for the Jacobi Determinant algorithm used in the subspace iteration method.
|
ARPACK
| The presence of this keyword under the EIGEN command specifies the usage of the ARPACK eigensolver in the specified
mode (see mode below). Otherwise, the default choice is the subspace iteration method. The ARPACK choice is required whenever one
of the two matrices or is indefinite, or one or both of them are singular. Indefinite systems arise: (1) if the analysis involves the HELMHOLTZ,
IMPEDANCE, or EIGEN command with a positive shift (see SHIFT in EIGEN) or for buckling analysis (see ARPACK in EIGEN),
or (2) the structural model includes rigid and/or joint elements (see TOPOLOGY), linear multi-point constraints (see LMPC), or tied
surfaces (see TIEDSURFACES), and the Lagrange multiplier method
is chosen for enforcing the associated constraints (see CONSTRAINTS). In either case, the equation solver must be properly chosen in STATICS.
|
which
| Keyword (characters) to specify which eigenpairs to be computed by ARPACK.
This keyword can take one of the following values.
|
LA
| In this case, the neigpa eigenpairs whose eigenvalues are just to the right of the shift are computed. This
is the default value of which when the shift is zero (  ). ).
|
SA
| In this case, the neigpa eigenpairs whose eigenvalues are just to the left of the shift are computed.
|
BE
| In this case, neigpa eigenpairs with eigenvalues on either side of the shift are computed. This
is the default value of which when the shift is non zero (  ). ).
|
mode
| Integer identifier to specify the mode in which to run ARPACK. It can take one of the following values.
|
3
| This default mode, which is the
shift-invert mode, is recommended for all generalized eigenvalue
problems except those for which the matrix is indefinite.
Hence, this mode is particularly not recommended for buckling analysis.
|
4
| This mode is recommended for generalized eigenvalue problems where the matrix is indefinite. Hence, this mode is particularly recommended for buckling analysis.
In this case, a nonzero shift should be specified in SHIFT (see above).
|
lbound
| Lower bound of a set or range of eigenvalues to be computed by ARPACK (real).
|
nshifts
| Number of shifts to be used by ARPACK when computing the neigpa eigenvalues that are greater than lbound (integer). The specific values of the
shifts are automatically selected by ARPACK, and neigpa/nshifts eigenpairs are computed per shift.
|
ubound
| Upper bound of a range of eigenvalues to be computed by ARPACK (real).
|
neigps
| When a range of eigenvalues [lbound, ubound] is specified, ARPACK computes all eigenpairs whose eigenvalues lie within this range.
In this case, a first shift is set to lbound and neigps consecutive eigenvalues within the range [lbound, ubound] are computed.
Then, a recursive procedure in which the largest previously computed eigenvalue is chosen as a new shift and neigps new eigenvalues within
the range [lbound, ubound] are computed using this shift is applied until all eigenvalues within the specified range are captured.
The default value for neigps is 50.
|
MAXITR |
|
maxitr
| Maximum number of iterations for the eigensolver. The default value is  nsbspv.
|
35 ELEMENT TOPOLOGY *S*
|
Command Statement: TOPOLOGY
|
The TOPOLOGY command is used to signal that the following data lines correspond to the connectivity and type of each element.
Note 1: Different structural and solid mechanics elements (M = Mechanic) support different material laws (see MATLAW). In general, all such elements support the standard linear elastic
constitutive equation that can be specified in MATERIAL. In addition:
- The three-dimensional solid elements (type 17, 23, 24, 25, 72, 91, 92, and 97) support the pre-defined material laws
Linear, HenckyElastic, MooneyRivlin, NeoHookean, Ogden, StVenantKirchhoff,
BilinearPlastic, FiniteStrainPlastic, LogStrainPlastic, SimoPlastic, ViscoLinearElastic,
ViscoMooneyRivlin, ViscoNeoHookean, and ViscoStVenantKirchhoff (see MATLAW).
- The shell elements
15 and 1515 support the pre-defined material laws J2Plasticity,
LinearPlaneStress,
PlaneStressBilinearPlastic, ViscoLinearPlaneStress, ShellFabricMap, ShellFabricMat, ShellViscoFabricMap, and ShellViscoFabricMat (see MATLAW).
- The shell element
16 supports the pre-defined material laws HypoElastic, J2Plasticity, KK1, and
KK2 (see MATLAW).
- The membrane elements
128 and 129 support the pre-defined material laws LinearPlaneStress, HyperElasticPlaneStress, ViscoLinearPlaneStress,
ViscoHyperElasticPlaneStress,
PlaneStressMooneyRivlin, PlaneStressNeoHookean,
PlaneStressBilinearPlastic, PlaneStressFiniteStrainPlastic,
PlaneStressViscoMooneyRivlin, PlaneStressViscoNeoHookean, FabricMap, FabricMat, ViscoFabricMap, and ViscoFabricMat (see MATLAW).
Note 2: For flexible beam elements (type 6, 7, or 14), AERO-S supports a run-time generation
of local frames that is activated either when the target flexible beam element is identified under the EFRAMES command
and a third node is specified to generate its local frame, or when a third node is found in the definition of a
flexible beam element within this command for the same purpose. The only requirement for the third node is that it does
not be colinear with the other two nodes defining the flexible beam element and its local -axis. Under the EFRAMES command,
the third node defines the local  plane. Under this command, it defines the local
plane. Under this command, it defines the local  plane. Using the third node
option under this command for a flexible beam element relieves the user from specifying a local frame for this element
under the
plane. Using the third node
option under this command for a flexible beam element relieves the user from specifying a local frame for this element
under the EFRAMES command. An example illustrating the third node option in the TOPOLOGY command can be
found in APPENDIX 3.
Note 3: In a linear dynamic analysis, the freeplay-induced
forces and moments are interpreted as configuration-dependent and
automatically treated as piecewise constant (see PIECEWISE in STATICS).
Note 4: Currently, only the SPOOLES and MUMPS sparse direct solvers and the FETI-DP(H) solvers can handle rigid elements.
Note 5: Thermal loads (see TEMPERATURES)
are currently implemented only for the truss, Euler beam, Timoshenko
beam, 4-noded plane stress/plane strain, 4-noded as well as 10-noded
tetrahedron,
8-noded as well as 20-noded and 32-noded brick, 6-noded as well as
15-noded and 26-noded penta elements, and all 3- and 4-noded shell
elements.
Note 6: The heat radiation elements 56, 57, and 58 are primarily nonlinear thermal elements.
Hence, the presence of any of these elements in a thermal model usually implies a nonlinear analysis
and therefore requires specifying the NONLINEAR command in the ASCII Input Command Data file. However,
in the presence of such elements in the thermal model but absence of the NONLINEAR command in the aforementioned
input file, AERO-S performs a linearized thermal (perturbation) analysis where the conductivity matrix is
adjusted by the Jacobian of the finite element treatment of the radiation boundary condition evaluated at an
equilibrium temperature field that must be specified in this case using the ETEMP command. In principle,
the equilibrium temperature field is the solution of a related nonlinear steady thermal analysis problem with
radiation boundary conditions; therefore, it captures the effect of the ambient (reference) temperature of the enclosure
receiving the radiation which is specified in the parameter Tr of the MATERIAL command. However,
the linearized thermal (perturbation) problem solved by AERO-S in the presence of a heat radiation
element in the thermal model but absence of the NONLINEAR command is not affected by this reference temperature.
Note 7: For DEM (Discontinuous Enrichment Method) and DGM
(Discontinuous Galerkin Method) elements, Q, T, and H
designate a quadrilateral, a triangle in two dimensions and a
tetrahedron in three dimensions, and an hexahedron, respectively.
In the notation Q-X-Y, T-X-Y, and H-X-Y, X denotes the number of
enrichment functions in the element and Y denotes the number of
Lagrange multiplier degrees of freedom per edge or face of the element.
In the notation X1xX2-Y for elastodynamics, X1 denotes
the number of directions of the plane wave enrichment functions, X2
denotes the number of enrichment functions per wave direction
(X2 = 2 (one pressure and one shear wave) in two dimensions and X2 = 3
(one pressure and two shear waves) in three dimensions),
and Y denotes the number of Lagrange multiplier degrees of freedom per
edge of face of the element. The connectivity (geometry
and local node numbering) of all Q, T, and H DEM and DGM elements is
that of Q, T, and H higher-order isoparametric elements,
respectively. Hence, for each DEM element, the degree of the polynomial
field can be deduced from the number of nodes of that element.
Note 8: The fluid elements (type 301, 302, 311, 312, 321, and 331) are active only in the following cases: (1) a mass computation
using the MASS command, (2) a sloshing eigen computation using the SLOSH and related commands, (3) a hydroelastic
eigenvalue computation using the EIGEN, HEFRS, HEFSB and related commands.
The input format of this command is given below.
ELEMENT# ELEMENT_TYPE CONNECTIVITY_NODES
|
ELEMENT#
| Element identification number whose type and connectivity are to be specified (integer).
|
ELEMENT_TYPE: | M=Mechanic - A=Acoustic (Helmholtz or Time-Domain) - H=Heat- C=Coupled Thermoelastic - F=Fluid
|
| 1 | M: 3d truss (bar) with 3 dof/node (Figure 1).
|
| 2 | M: 2d 4-node plane stress/plane strain quadrilateral with 2 dof/node (Figure 2). Currently, a consistent
mass matrix is not available for this element.
|
| 3 | H: 3d 4-node quadrilateral with 1 dof/node (Figure 2).
|
| 4 | M: 2d 3-node triangle with 2 dof/node (Figure 3). Currently, a consistent
mass matrix is not available for this element.
|
| 6 | M: 3d 2-node Bernoulli beam with 6 dof/node (Figure 1).
|
| 7 | M: 3d 2-node Timoshenko beam with 6 dof/node (Figure 1). Currently, a consistent mass matrix
is not available for this element.
|
| 8 | M: 3d 3-node triangular AQR shell with 6 dof/node (Figure 3).
Currently, a consistent mass matrix is not available for this element.
|
| 88 | M: 3d 4-node shell with 6 dof/node that splits into 2 triangular shells of type 8
(Figure 2). Currently, a consistent mass matrix is not available for this element.
|
| 9 | H: 3d 2-node line with 1 dof/node (Figure 1).
|
| 10 | H: 2d 4-node quadrilateral with 1 dof/node (Figure 2).
|
| 11 | M: 3d 1-node (lumped) torsional spring with 3 dof/node for linear analysis (Figure 4).
|
| 12 | M: 3d 1-node (lumped) translational spring with 3 dof/node for linear analysis.
|
| 15 | M: 3d 3-node triangular AQR shell with 6 dof/node and composite as well as nonlinear material
capability (Figure 3). Note that only a lumped mass matrix is available for this
element. Hence, this element effectively replaces the elements 8 and 20 even though both are still
supported.
|
| 1515 | M: 3d 4-node quadrilateral AQR shell with 6 dof/node and composite as well as nonlinear
material capability (Figure 2). Note that only a lumped mass matrix is available
for this element. Hence, this element effectively replaces the elements 88 and 2020 even though
both are still supported.
|
| 16 | M: 3d Belytschko-Tsay 4-node quadrilateral or degenerated quadrilateral (Figure 2),
or 3-node triangular shell with 6 dof/node and 1-point quadrature rule (Figure 3),
and nonlinear material capability.
Currently, this element is available only for explicit dynamic analyses.
|
| 17 | M: 3d 8-node brick with 3 dof/node (Figure 5).
|
| 18 | M: 3d 4-node shear panel with 3 dof/node (Figure 2). Currently, a consistent mass matrix
is not available for this element.
|
| 19 | M: 3d 3-node triangular membrane with 6 dof/node (Figure 3; only in-plane and drilling stiffnesses). Currently, a consistent mass matrix is not available for this element.
|
| 20 | M: 3d 3-node triangular composite or orthotropic shell with 6 dof/node (Figure 3). Currently, a consistent mass matrix is not available for this element.
|
| 2020 | M: 3d 4-node composite or orthotropic shell with 6 dof/node (Figure 2).
Currently, a consistent mass matrix is not available for this element.
|
| 21 | M: 3d translational spring-link with 3 dof/node for linear analysis (Figure 1).
|
| 22 | M: 3d torsional spring-link with 3 dof/node for linear analysis (Figure 1).
|
| 23 | M: 3d 4-node tetrahedron with 3 dof/node (Figure 6) and nonlinear material capability.
|
| 24 | M: 3d 6-node pentahedron with 3 dof/node (Figure 7) and nonlinear material capability.
|
| 25 | M: 3d 10-node tetrahedron with 3 dof/node (Figure 8) and nonlinear material capability.
|
| 26 | M: 3d 2-node damper element with 3 dof/node (Figure 1).
|
| 27 | M: 3d 2-node or curved 3-node cable with 3 dof/node (Figure 26).
In general, this element is designed for nonlinear analysis (NONLINEAR),
in which case its constitutive law is

 However, this element can also be used in a linear analysis, in which case its constitutive law becomes
However, this element can also be used in a linear analysis, in which case its constitutive law becomes
 Hence, for a linear analysis, this element reduces to a two-node (or curved three-node), bar-like element.
Hence, for a linear analysis, this element reduces to a two-node (or curved three-node), bar-like element.
|
| 30 | A: 2d 4-node quadrilateral with 1 dof/node (Figure 2).
|
| 31 | A: 2d 4-node quadrilateral GLS element with 1 dof/node (Figure 2).
|
| 32* | A: 2d 8-node quadrilateral with 1 dof/node (Figure 9).
|
| 33* | A: 2d 4-node quadrilateral bubble element with 1 dof/node (Figure 2).
|
| 34* | A: 2d 4-node quadrilateral two-level bubble element with 1 dof/node (Figure 2).
|
| 35 | A: 2d 3-node triangle with 1 dof/node (Figure 3).
|
| 36 | A: 2d 3-node triangular GLS element with 1 dof/node (Figure 3).
|
| 38* | A: 2d 6-node triangle with 1 dof/node (Figure 10).
|
| 40 | A: 3d 4-node tetrahedron with 1 dof/node (Figure 6).
|
| 41 | A: 3d 4-node tetrahedral GLS element with 1 dof/node (Figure 6).
|
| 42 | A: 3d 10-node tetrahedron with 1 dof/node (Figure 8).
|
| 44 | A: 3d 8-node brick GLS element with 1 dof/node (Figure 5).
|
| 45* | A: 3d 8-node brick with 1 dof/node (Figure 5).
|
| 46 | H: 3d 3-node triangular thermal (heat conduction) element (Figure 3).
|
| 4646 | H: 3d 4-node quadrilateral thermal (heat conduction) element that splits into 2 triangular elements of type 46 (Figure 2).
|
| 47 | H: 3d 2-node line with 1 dof/node for boundary convection (Figure 1).
|
| 48 | H: 3d 4-node quadrilateral with 1 dof/node for boundary convection (Figure 2).
|
| 49 | H: 3d 3-node triangle with 1 dof/node for boundary convection (Figure 3).
|
| 50 | H: 3d 4-node, 10-node, 20-node, or 35-node tetrahedron with 1 dof/node.
These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line (Figure 11).
|
| 51 | H: 3d 8-node brick with 1 dof/node (Figure 5).
|
| 52* | M: 3d 6-node triangular shell (Figure 10).
|
| 53 | H: 2d 3-node triangular thermal (heat conduction) element (Figure 3).
|
| 56 | H: 3d 2-node heat radiation element (Figure 1).
|
| 57 | H: 3d 3-node triangular heat radiation element (Figure 3).
|
| 58 | H: 3d 4-node quadrilateral heat radiation element (Figure 2).
|
| 59 | A: 2d 6-node axisymmetric triangular element with 1 dof/node (Figure 10).
|
| 60 | A: 2d 4-node axisymmetric quadrilateral with 1 dof/node (Figure 2).
|
| 61 | A: 2d 3-node axisymmetric triangle with 1 dof/node (Figure 3).
|
| 62 | A: 2d 8-node axisymmetric quadrilateral with 1 dof/node (Figure 9).
|
| 65 | M: 3d 2-node rigid truss (bar) (Figure 1); enforces constant length of the element.
|
| 66 | M: 3d 2-node rigid beam of non zero length (Figure 1);
enforces constant length of the element, equal rotations of the cross
sections at its two nodes,
and other constraints between its
rotational and translational dofs to simulate a genuinely rigid beam.
|
| 67 | M: 3d 2-node rigid link (translational and rotational, Figure 1);
for each specified dof at one node, it enforces equality to the
corresponding dof at the other node. Therefore, this element
enforces constant length like element type 66; however, it also enforces
additional constraints and therefore is different from element type 66.
|
| 68 | M: 3d 2-node rigid translational link (Figure 1);
for each specified translational dof at one node, it enforces equality
to the corresponding dof at the other node. Therefore, this element
enforces constant length like element type 65; however, it also enforces
additional constraints and therefore is different from element type 65.
|
| 69 | M: 3d 2-node rigid rotation link (Figure 1); for each rotational dof at one node, enforces equality to the corresponding dof at the other node.
|
| 70 | M: 3d 8-node rigid brick with 3 dof/node (Figure 5); enforces constant distance between each pair of its nodes (special case of element type 71).
|
| 71 | M: 3d rigid line, plane, or solid element with 3 dof/node and anywhere from 3 to 32 nodes per element (Figure 12); enforces constant distance between each pair of its nodes.
|
| 72 | M: 3d 20-node brick (Figure 12) with 3 dof/node and nonlinear material capability.
|
| 73 | M: 3d 3-node rigid shell (Figure 3); equivalent to two rigid beam, each defined by an edge of the element (special case of type 74).
|
| 74 | M: 3d rigid line, plane, or solid element with 6 dof/node and anywhere from 3 to 32 nodes per element (Figure 13);
enforces constant distance between each pair of its nodes, equal values
of the rotational dofs at all nodes, and other constraints to simulate a
genuinely rigid element.
|
| 76 | M: 3d 4-node rigid shell (Figure 2); equivalent to three rigid beam, each defined by an edge of the element (special case of type 74).
|
| 77 | M: 3d 1-node point-to-point constraint element with 3 dof/node.
|
| 78 | M: 3d 1-node point-to-line constraint element with 3 dof/node.
|
| 79 | M: 3d 1-node point-to-plane constraint element with 3 dof/node.
|
| 81 | H: 2d 4-node contact resistance thermal element with 1 dof/node that can be inserted between two thermal elements of type 10 (Figure 2).
|
| 82 | H: 3d 8-node contact resistance thermal element with 1 dof/node that can be inserted between two thermal elements of type 51 (Figure 5).
|
| 83 | H:
3d 6-node contact resistance thermal element with 1 dof/node that can
be inserted between two thermal elements of type 50 with 4 nodes each (Figure 7).
|
| 84 | H: 2d 3-node triangular bulk fluid (thermal) element with 1 dof/node. The first node appearing in the
connectivity list of this element must be inside the bulk fluid, and the other two nodes
must be located at the interface boundary between the bulk fluid and the surrounding material.
The temperature at the first node is by definition the average temperature of the bulk fluid (Figure 14).
|
| 85 | H: 3d 4-node tetrahedron bulk fluid (thermal) element with 1 dof/node. The first
node appearing in the connectivity list of this element must be inside the bulk fluid, and the other three nodes
must be located at the interface boundary between the bulk fluid and the surrounding material.
The temperature at the first node is by definition the average temperature of the bulk fluid (Figure 15).
|
| 86 | H: 3d 5-node pyramidal bulk fluid (thermal) element with 1 dof/node. The first
node appearing in the connectivity list of this element must be inside the bulk fluid, and the other four nodes
must be located at the interface boundary between the bulk fluid and the surrounding material.
The temperature at the first node is by definition the average temperature of the bulk fluid (Figure 16).
|
| 87 | M: 3d 4-node quadrilateral membrane with 6 dof/node (Figure 2; only in-plane and drilling stiffnesses). Currently, a consistent mass matrix is not available for this element.
|
| 90 | A: 3d 6-node wedge with 1 dof/node (Figure 7).
|
| 91 | M: 3d 32-node serendipity brick with 3 dof/node (Figure 13) and nonlinear material capability.
|
| 92 | M: 3d 26-node serendipity wedge with 3 dof/node (Figure 17) and nonlinear material capability.
|
| 93 | A: 3d 32-node serendipity brick with 1 dof/node (Figure 13).
|
| 94 | A: 3d 26-node serendipity wedge with 1 dof/node (Figure 17).
|
| 95 | A: 3d 8-node, 27-node, 64-node, or 125-node hexahedron with 1 dof/node.
These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line
(Figure 18). They also support the PML (Perfectly Matching Layer) computational technology.
|
| 96 | A: 3d 4-node, 10-node, 20-node, or 35-node tetrahedron with 1 dof/node (Figure 11).
These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line
They also support the PML (Perfectly Matching Layer) computational technology.
|
| 97 | M: 3d 15-node wedge with 3 dof/node and nonlinear material capability (Figure 31).
|
| 98 | A: 2d 4-node, 9-node, 16-node, or 25-node quadrilateral with 1 dof/node.
These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line
(Figure 19). They also support the PML (Perfectly Matching Layer) computational technology.
|
| 99 | A: 2d 3-node, 6-node, or 10-node triangle with 1 dof/node.
These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line
(Figure 20). They also support the PML (Perfectly Matching Layer) computational technology.
|
| 100 | M: 2d 4-node, 9-node, 16-node, or 25-node quadrilateral with 3 dof/node. These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line (Figure 19).
|
| 101 | M: 2d 3-node, 6-node, or 10-node triangular element with 3 dof/node. These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line (Figure 20).
|
| 102 | M: 3d 8-node, 27-node, 64-node, or 125-node hexahedron with 3 dof/node. These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line (Figure 18).
|
| 103 | M: 3d 4-node, 10-node, 20-node, or 35-node tetrahedron with 3 dof/node. These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line (Figure 11).
|
| 105 | A: 3d 8-node, 27-node, 64-node, or 125-node spectral hexahedron with 1 dof/node. These spectral elements use a special local node-numbering for connectivity which goes line-by-line (Figure 18).
|
| 106 | M: 3d 2-node rigid beam of arbitrary length, including zero length (Figure 1);
enforces constant length of the element, equal rotations of the cross
sections at its two nodes, and other
constraints between its rotational and translational dofs to simulate a
genuinely rigid beam.
|
| 108 | A: 2d 4-node, 9-node, 16-node, or 25-node spectral quadrilateral element with 1 dof/node. These spectral elements use a special local node-numbering for connectivity which goes line-by-line (Figure 19).
|
| 109 | H: 3d 8-node, 27-node, 64-node, or 125-node hexahedron with 1 dof/node. These "p-type" elements use a special local node-numbering for connectivity which goes line-by-line (Figure 18).
|
| 111 | M: 3d fabric truss with 3 dof/node (Figure 1). Currently, a consistent mass matrix
is not available for this element.
|
| 118 | M: 3d 2-node planar joint with 6 dof/node (Figure 27).
This element has a co-rotating reference
frame attached to each of its two nodes. Both frames have
the same orientation in the undeformed
configuration and therefore can be viewed, as far as input is
concerned, as the same frame. The
orientation of this frame in the undeformed configuration must be
specified under EFRAMES, using the same format as for a beam. In this format, the
and axes of the local frame correspond to the and
axes of the co-rotating reference frame
at node 1 in its undeformed
configuration. These axes should be defined so that the position of node
2
is constrained to lie in the plane they
define.
|
| 119 | M: 3d 2-node welded joint with 6 dof/node (Figure 30).
This element constrains the relative translations and rotations between two nodes.
|
| 120 | M: 3d 2-node spherical joint with 3 dof/node. This element constrains the relative
translations between two nodes (Figure 21).
|
| 121 | M: 3d 2-node translational joint with 3 rotational dof/node (Figure 28).
This element constrains the relative rotations between two nodes.
|
| 122 | M: 3d 2-node universal joint with 6 dof/node (Figure 22).
This element has a co-rotating reference frame attached to each of its two nodes.
Both frames have the same orientation in the undeformed configuration and therefore
can be viewed, as far as input is concerned, as the same frame.
The orientation of this frame in the undeformed configuration must be specified under
EFRAMES, using the same format as for a beam. In this format, the axis of the local frame corresponds to the
orientation in the undeformed configuration of the axis of the co-rotating
reference frame at node 2, and the axis of the local frame corresponds to the orientation in the undeformed configuration
of the axis of the co-rotating reference frame at node 1. These two axes should be defined so that they remain orthogonal
during the deformations.
|
| 123 | M: 3d 2-node revolute joint with 6 dof/node (Figure 23).
This element has a co-rotating reference frame attached to each of its two nodes.
Both frames have the same orientation in the undeformed configuration and therefore
can be viewed, as far as input is concerned, as the same frame.
The orientation of this frame in the undeformed configuration must be specified under
EFRAMES, using the same format as for a beam. In this format, the axis of the
local frame corresponds to the orientation in the undeformed configuration of the axis of free
relative rotation.
|
| 124 | M: 3d 2-node cylindrical joint with 6 dof/node (Figure 24).
This element has a co-rotating reference frame attached to each of its two nodes.
Both frames have the same orientation in the undeformed configuration and therefore
can be viewed, as far as input is concerned, as the same frame.
The orientation of this frame in the undeformed configuration must be specified under
EFRAMES, using the same format as for a beam.
In this format, the axis of the local frame corresponds to the orientation in the undeformed configuration of the axis of free
relative displacement and rotation.
|
| 125 | M: 3d 2-node prismatic joint with 6 dof/node (Figure 25).
This element has a co-rotating reference frame attached to each of its two nodes.
Both frames have the same orientation in the undeformed configuration and therefore
can be viewed, as far as input is concerned, as the same frame.
The orientation of this frame in the undeformed configuration must be specified under
EFRAMES, using the same format as for a beam.
In this format, the axis of the local frame defines the orientation in the undeformed configuration of the axis of free
relative translation.
|
| 126 | M: 3d 2-node revolute joint-with-driver and 6 dof/node (Figure 23)
and a relative rotation (between node 2
and node 1, defined as rotation of node 2 - rotation of node 1)
around the joint axis of rotation that
can be prescribed using a time-dependent law specified in
MATERIAL (for static analysis, the relative rotation is set to the initial value of the chosen
law). This element has a co-rotating reference frame attached to each of its two nodes.
Both frames have the same orientation in the undeformed configuration and therefore
can be viewed, as far as input is concerned, as the same frame.
The orientation of this frame in the undeformed configuration must be specified under
EFRAMES, using the same format as for a beam. In this format, the axis of the
local frame corresponds to the orientation in the undeformed configuration of the axis of forced
relative rotation.
|
| 127 | M: 3d 2-node pin-in-slot joint with 6 dof/node (Figure 29).
This element has a co-rotating reference
frame attached to each of its two nodes. Both frames have the
same orientation in the undeformed
configuration and therefore can be viewed, as far as input is concerned,
as the same frame.
The orientation of this frame in the
undeformed configuration must be specified under EFRAMES, using the same format as for a beam.
In this format, the -axis of the local frame corresponds to the orientation in the undeformed configuration of the axis of free relative
translation, and its -axis corresponds to the orientation in the undeformed configuration of the axis of free relative rotation.
|
| 128 | M: 3d 4-node plane stress quadrilateral membrane with 3 dof/node (Figure 2).
|
| 129 | M: 3d 3-node plane stress triangular membrane with 3 dof/node (Figure 3).
|
| 131 | M: 3d 1-node discrete mass and inertia element with 6 dof/node. It accepts an offset as an
attribute (see MATERIAL) and therefore offers a functionality not provided by the DIMASS command.
|
| 132 | M: 3d 2-node massless rigid beam of non zero length (Figure 1);
enforces constant length of the element, equal rotations of the cross
sections at
its two nodes, and other constraints
between its rotational and translational dofs to simulate a genuinely
rigid beam. Because this element is designed to be always
massless, it is computationally more efficient than its
counterpart, element type 66, equipped with a zero density.
|
| 133 | M: 3d 2-node massless rigid beam (Figure 1)
of arbitrary length, including zero length; enforces constant length of
the element, equal rotations
of the cross sections at its two nodes,
and other constraints between its rotational and translational dofs to
simulate a genuinely rigid beam. Because this element is
designed to be always massless, it is computationally more
efficient than its counterpart, element type 106, equipped with a zero
density.
|
| 134 | M: 3d 2-node prismatic joint-with-driver and 6 dof/node (Figure 25) and a
relative displacement (between node 2 and node 1) along the joint axis of displacement that is
prescribed using a time-dependent law specified in MATERIAL
(for static analysis, the relative
displacement is set to the initial value
of the chosen law). This element has a co-rotating reference
frame attached to each of its two nodes.
Both frames have the same orientation in the undeformed
configuration and therefore can be viewed
as far as input is concerned as the same frame. The
orientation of this frame in the
undeformed configuration must be specified under EFRAMES,
using the same format as for a beam. Its axis defines the orientation in the undeformed
configuration of the axis of prescribed relative translation.
|
| 150 | M: 3d 4-node rigid tetrahedron with 3 dof/node (Figure 6).
|
| 151 | M: 3d 6-node rigid pentahedron with 3 dof/node (Figure 7).
|
| 177 | M: 3d 2-node point-to-moving-point constraint element with 3 dof/node.
|
| 178 | M: 3d 3-node point-to-moving-line constraint element with 3 dof/node.
|
| 179 | M: 3d 4-node point-to-moving-plane constraint element with 3 dof/node.
|
| 180 | M: 3d 8-node Q1-P0 hexahedron with 3 dof/node (Figure 5) with nonlinear material capability. This element, which uses a 3-field mixed formulation, is suitable
for modeling incompressible and nearly incompressible materials with large displacements.
|
| 181 | M: 3d 20-node Q2-P0 hexahedron with 3 dof/node (Figure 5) with nonlinear material capability. This element, which uses a 3-field mixed formulation, is suitable
for modeling incompressible and nearly incompressible materials with large displacements.
|
| 182 | M: 3d 20-node Q2-P1 hexahedron with 3 dof/node (Figure 5) with nonlinear material capability. This element, which uses a 3-field mixed formulation, is suitable
for modeling incompressible and nearly incompressible materials with large displacements.
|
| 183 | M: 3d 4-node P1-P0 tetrahedron with 3 dof/node (Figure 6) with nonlinear material capability. This element, which uses a 3-field mixed formulation, is suitable
for modeling incompressible and nearly incompressible materials with large displacements.
|
| 200 | M:
3d 2-node uniaxial translational spring with 3 dof/node for linear or
nonlinear analyses. The initial orientation of the spring axis is
aligned with that of the element
defined by its two nodes: hence, this
element cannot have a zero length.
|
| 201 | M:
3d 2-node uniaxial translational spring with 6 dof/node for linear or
nonlinear analyses. The initial orientation of the spring axis is the
local -axis of the element frame.
It must be specified under EFRAMES,
using the same format as for a beam. This translational spring can
connect with any other element with 6 dof/node without
raising any mechanism issue. Furthermore,
it distinguishes itself from element type 200 in that it can have a
zero length.
|
| 202 | M:
3d 2-node uniaxial torsional spring with 3 rotational dof/node for
linear or nonlinear analyses. The initial orientation of the spring axis
is the local -axis
of the element frame. It must be specified under EFRAMES, using the same format as for a beam.
|
| 203 | M: 3d 2-node uniaxial tension-only translational spring with 3 dof/node and an optional freeplay model, for linear or nonlinear analyses. The parameters of the optional freeplay model
can be specified in MATERIAL.
The initial orientation of the spring axis is aligned with that of the
element defined by its two nodes: hence, this element cannot have a zero
length.
|
| 204 | M: 3d 2-node uniaxial tension-only or compression-only translational spring with 6 dof/node and an optional freeplay model, for linear or nonlinear analyses.
The parameters of the optional freeplay model can be specified in MATERIAL. The initial orientation of the spring axis is the local -axis of the element
frame. It must be specified under EFRAMES, using the same format as for a beam. The element acts as a tension-only translational spring if the dot product
of the local -axis specified under EFRAMES
and the axis implied by the ordering of the two nodes defining this
element is positive. Otherwise, it acts as a compression-only
translational spring.
|
| 205 | M: 3d 2-node uniaxial tension-only or compression-only torsional spring with 3 rotational dof/node and an optional freeplay model, for linear or nonlinear analyses.
The parameters of the optional freeplay model can be specified in MATERIAL. The initial orientation of the spring axis is the local -axis of the element
frame. It must be specified under EFRAMES, using the same format as for a beam. The element acts as a tension-only rotational spring if the dot product
of the local -axis specified under EFRAMES
and the axis implied by the ordering of the two nodes defining this
element is positive. Otherwise, it acts as a compression-only
rotational spring.
|
| 220 | M: 3d 2-node spherical joint spring combination with 6 dof/node (Figure 21).
This element is equivalent to one
spherical joint (type 120) and three embedded torsional springs (type
202).
The initial orientation of the first
embedded spring's axis is the local -axis of the element frame. The initial orientation of the second embedded spring's axis
is the local -axis of the element frame. The initial orientation of the third embedded spring's axis is the local -axis of the element frame. This information must
be specified under EFRAMES, using the same format as for a beam element.
|
| 221 | M: 3d 2-node translational joint spring combination element with 6 dof/node (Figure 28).
This element is equivalent to one translational joint (type 121) and three embedded translational
springs (type 201). The initial orientation of the first embedded spring's axis is the local -axis of the element frame.
The initial orientation of the second embedded spring's axis is the local -axis of the element frame. The initial orientation
of the third embedded spring's axis is the local -axis of the element frame.
This information must be specified under EFRAMES, using the same format as for a beam.
|
| 222 | M: 3d 2-node universal joint spring combination element with 6 dof/node (Figure 22).
This element is equivalent to one universal joint (type 122) and two embedded torsional spring
elements (type 202). The initial orientation of the first embedded spring's axis is the local -axis of the element frame. The initial orientation of the second embedded spring's axis is
the local -axis of the element frame. This information must be specified under EFRAMES, using the same format as for a beam.
|
| 223 | M: 3d 2-node revolute joint spring combination element with 6 dof/node (Figure 23). This
element is equivalent to one revolute joint (type 123) and one embedded torsional spring
element (type 202). The initial orientation of the embedded spring's axis is the local -axis of
the element frame. This information must be specified under EFRAMES, using the same format as
for a beam.
|
| 224 | M: 3d 2-node cylindrical joint spring combination element with 6 dof/node (Figure 24).
This element is equivalent to one cylindrical joint (type 124), one embedded translational
spring (type 201), and
one embedded torsional spring (type 202). The initial orientation of the first
(translational) embedded spring's axis is the local -axis of the element frame. The initial
orientation of the second (torsional) embedded spring's axis is also the local -axis of the
element frame. This information must be specified under EFRAMES, using the same format as for
a beam element.
|
| 225 | M: 3d 2-node prismatic joint spring combination element with 6 dof/node (Figure 25).
This element is is equivalent to one prismatic joint (type 125) and one embedded
translational spring (type 201). The initial orientation of the embedded spring's axis is
the local -axis of the element frame. This information must be specified under EFRAMES,
using the same format as for a beam.
|
| 226 | M: 3d 2-node revolute joint-with-actuator with 6 dof/node (Figure 23).
This element is equivalent to one
revolute joint spring combination element (type 223) and two equal and opposite embedded follower
(see FORCES) moments applied to the two nodes of the element. The magnitude of these moments
is prescribed using a time-dependent law specified in MATERIAL
(for static analysis, the
magnitude of the moments is set to the
initial value of the chosen law). This element has a
co-rotating reference frame attached to
each of its two nodes. Both frames have the same orientation
in the undeformed configuration and
therefore can be viewed as far as input is concerned as the same
frame. The orientation of this frame in
the undeformed configuration must be specified under
EFRAMES, using the same format as for a beam. Its
-axis defines the orientation in
the undeformed configuration of the axis
about which the embedded moment applied to the second node
of the element acts, and also the initial
orientation of the embedded spring's axis.
|
| 227 | M: 3d 2-node pin-in-slot joint spring combination element with 6 dof/node (Figure 29).
This element is is equivalent to one
pin-in-slot joint (type 127), one embedded translational spring
element (type 201), and one embedded
torsional spring (type 202). The initial orientation of the first
embedded (translational) spring's axis is
the local -axis of the element frame.
The initial orientation of the second embedded (torsional) spring's axis is the local -axis of the element frame.
This information must be specified under EFRAMES, using the same format as for a beam.
|
| 234 | M: 3d 2-node prismatic joint-with-actuator element with 6 dof/node (Figure 25).
This element is equivalent to one
prismatic joint spring combination
element (type 225) and two equal and opposite embedded follower
(see FORCES) forces applied to the two nodes of the element. The magnitude of these forces
is prescribed using a time-dependent law specified in MATERIAL
(for static analysis, the
magnitude of the forces is set to the
initial value of the chosen law). This element has a
co-rotating reference frame attached to
each of its two nodes. Both frames have the same orientation
in the undeformed configuration and
therefore can be viewed as far as input is concerned as the same
frame. The orientation of this frame in
the undeformed configuration must be specified under
EFRAMES, using the same format as for a beam. Its
-axis defines the orientation in
the undeformed configuration of the
direction in which the embedded force applied to the second node
of the element acts, and also the initial
orientation of the embedded spring's axis.
|
| 280 | M: 3d 8-node Q1-P0 incompressible hexahedron with 3 dof/node (Figure 5)
with nonlinear material capability. This element, which uses a 4-field
mixed formulation,
is suitable for modeling incompressible
and nearly incompressible materials with large displacements.
|
| 301 | F: 2d 4-node quadrilateral with 1 dof/node (Figure 2) for modeling an incompressible,
inviscid fluid — in the presence of gravity — using a displacement-potential formulation, and
computing sloshing modes.
|
| 302 | F: 2d 2-node element with 1 dof/node for modeling the free-surface of an incompressible, inviscid
fluid using a displacement-potential formulation (Figure 1). For two-dimensional sloshing
or hydroelastic mode computations, it is to be used with element type 301.
|
| 311 | F: 3d 4-node tetrahedron with 1 dof/node (Figure 6) for modeling an incompressible,
inviscid fluid — in the presence of gravity — using a displacement-potential formulation, and
computing sloshing modes.
|
| 312 | F: 3d 3-node triangle with 1 dof/node for modeling the free-surface of an incompressible,
inviscid fluid using a displacement-potential formulation (Figure 3).
For
three-dimensional sloshing or
hydroelastic mode computations, it is to be used with element type 311.
|
| 321 | F: 2d 4-node quadrilateral with 1 dof/node (Figure 2) for modeling an incompressible,
weightless fluid using a displacement-potential formulation, and computing hydroelastic vibration
modes.
|
| 323 | M: This element is a variant of element type 223 that is equipped with a freeplay model (Figure 23).
Hence, it is a 3d 2-node revolute joint
spring combination element with a nonlinear (or piecewise linear,
see PIECEWISE in STATICS) torsional spring and 6 dof/node. The parameters of its freeplay model can be specified in MATERIAL.
The initial orientation of the embedded spring's axis is the local -axis of the element frame. This information must be specified under EFRAMES,
using the same format as for a beam.
|
| 325 | M: This element is a variant of element type 225 that is equipped with a freeplay model (Figure 25).
Hence, it is a 3d 2-node prismatic joint
spring combination element with a nonlinear (or piecewise linear,
see PIECEWISE in STATICS) translational spring and 6 dof/node. The parameters of its freeplay model can be specified in MATERIAL.
The initial orientation of the embedded spring's axis is the local -axis of the element frame. This information must be specified under EFRAMES,
using the same format as for a beam.
|
| 331 | F: 3d 4-node tetrahedron with 1 dof/node (Figure 6) for modeling an incompressible,
weightless fluid using a displacement-potential formulation, and computing hydroelastic vibration
modes.
|
| 333 | H: 3d 2-node line with 1 dof/node for ablation associated with the  ablation model (Figure 1). ablation model (Figure 1).
|
| 334 | H: 3d 3-node triangle 1 dof/node for ablation associated with the ablation model (Figure 3).
|
| 335 | H: 3d 4-node quadrilateral with 1 dof/node for ablation associated with the ablation model (Figure 2).
|
| 1100 | A: 2d 4-node Helmholtz DGM element Q-4-1 (Figure 19 with p = 2).
|
| 1101 | A: 2d 4-node Helmholtz DGM element Q-8-2 (Figure 19 with p = 2).
|
| 1102 | A: 2d 4-node Helmholtz DGM element Q-16-4 (Figure 19 with p = 2).
|
| 1103 | A: 2d 4-node Helmholtz DGM element Q-32-8 (Figure 19 with p = 2).
|
| 1110 | A: 2d 3-node Helmholtz DGM element T-4-1 (Figure 20 with p = 2, or Figure 3).
|
| 1111 | A: 2d 3-node Helmholtz DGM element T-8-2 (Figure 20 with p = 2, or Figure 3).
|
| 1120 | A: 2d 4-node Helmholtz DEM element Q-4-1 (Figure 19 with p = 2).
|
| 1121 | A: 2d 4-node Helmholtz DEM element Q-8-2 (Figure 19 with p = 2).
|
| 1122 | A: 2d 4-node Helmholtz DEM element Q-16-4 (Figure 19 with p = 2).
|
| 1123 | A: 2d 4-node Helmholtz DEM element Q-32-8 (Figure 19 with p = 2).
|
| 1130 | A: 2d 3-node Helmholtz DEM element T-4-1 (Figure 20 with p = 2, or Figure 3).
|
| 1131 | A: 2d 3-node Helmholtz DEM element T-8-2 (Figure 20 with p = 2, or Figure 3).
|
| 1150 | A: 3d 8-node Helmholtz DGM element H-6-1 (Figure 18 with p = 2).
|
| 1151 | A: 3d 8-node Helmholtz DGM element H-26-4 (Figure 18 with p = 2).
|
| 1152 | A: 3d 8-node Helmholtz DGM element H-56-8 (Figure 18 with p = 2).
|
| 1153 | A: 3d 8-node Helmholtz DGM element H-98-12 (Figure 18 with p = 2).
|
| 1160 | A: 3d 4-node Helmholtz DGM element T-6-1 (Figure 11 with p = 2, or Figure 6).
|
| 1161 | A: 3d 4-node Helmholtz DGM element T-26-4 (Figure 11 with p = 2, or Figure 6).
|
| 1162 | A: 3d 4-node Helmholtz DGM element T-56-8 (Figure 11 with p = 2, or Figure 6).
|
| 1170 | A: 3d 8-node Helmholtz DEM element H-6-1 (Figure 18 with p = 2).
|
| 1171 | A: 3d 8-node Helmholtz DEM element H-26-4 (Figure 18 with p = 2).
|
| 1172 | A: 3d 8-node Helmholtz DEM element H-56-8 (Figure 18 with p = 2).
|
| 1173 | A: 3d 8-node Helmholtz DEM element H-98-12 (Figure 18 with p = 2).
|
| 1200 | M: 2d 4-node Elastodynamic DGM element Q-4x2-2 (Figure 19 with p = 2).
|
| 1201 | M: 2d 4-node Elastodynamic DGM element Q-16x2-8 (Figure 19 with p = 2).
|
| 1220 | M: 2d 4-node Elastodynamic DEM element Q-4x2-2 (Figure 19 with p = 2).
|
| 1250 | M: 3d 8-node Elastodynamic DGM element H-6x3-3 (Figure 18 with p = 2).
|
| 1251 | M: 3d 8-node Elastodynamic DGM element H-26x3-15 (Figure 18 with p = 2).
|
| 1252 | M: 3d 8-node Elastodynamic DGM element H-50x3-28 (Figure 18 with p = 2).
|
CONNECTIVITY_NODES |
These should be listed in a stacked fashion on a single line. The various orderings are graphically depicted in the
figures below.
|
Figure 1: local node numbering for element types 1, 6, 7, 9, 21, 22, 26, 47, 56, 65--69, 111, 302, 333
Figure
2: local node numbering for element types 2, 3, 88, 10, 1515, 16, 18,
2020, 30, 31, 33, 34, 4646, 48, 58, 76, 81, 87, 128, 301, 321, 335
Figure
3: local node numbering for element types 4, 8, 15, 16, 19, 20, 35, 36,
46, 49, 53, 57, 73, 129, 312, 334, 1110,1111,1130,1131
Figure 4: local node numbering for element type 11
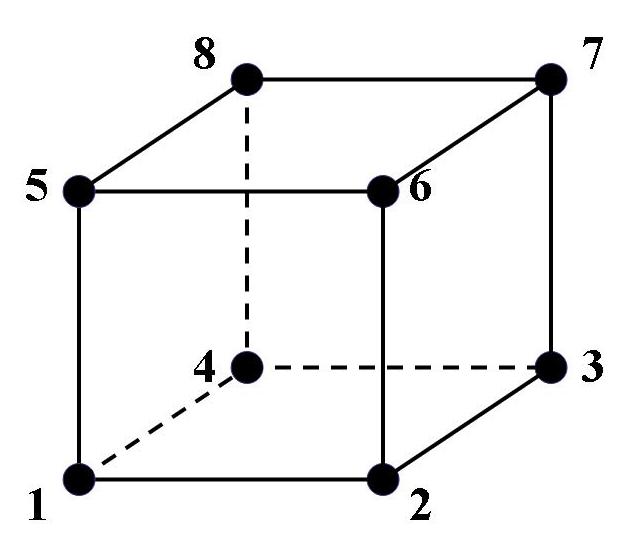
Figure 5: local node numbering for element types 17, 44, 45, 51, 70, 82, 180, 181, 182, 280
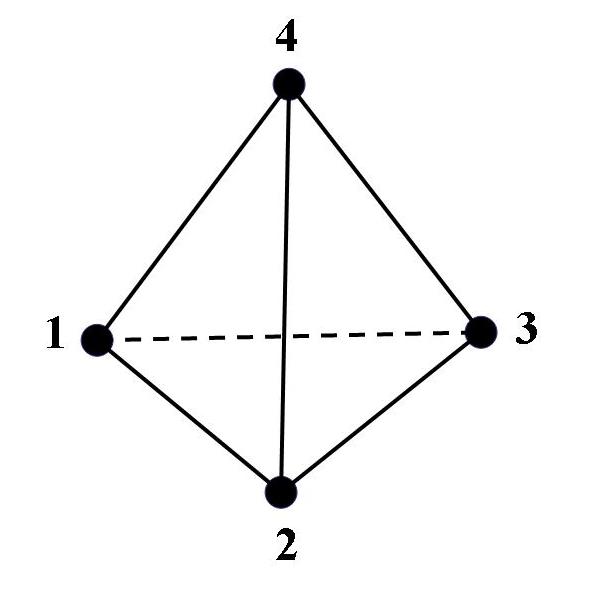
Figure 6: local node numbering for element types 23, 40, 41, 150, 183, 311, 331, 1160, 1161, 1162
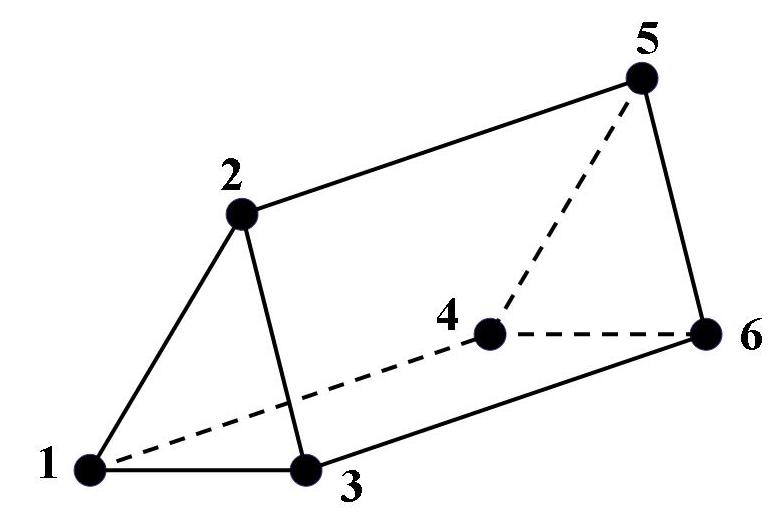
Figure 7: local node numbering for element types 24, 83, 90, 151
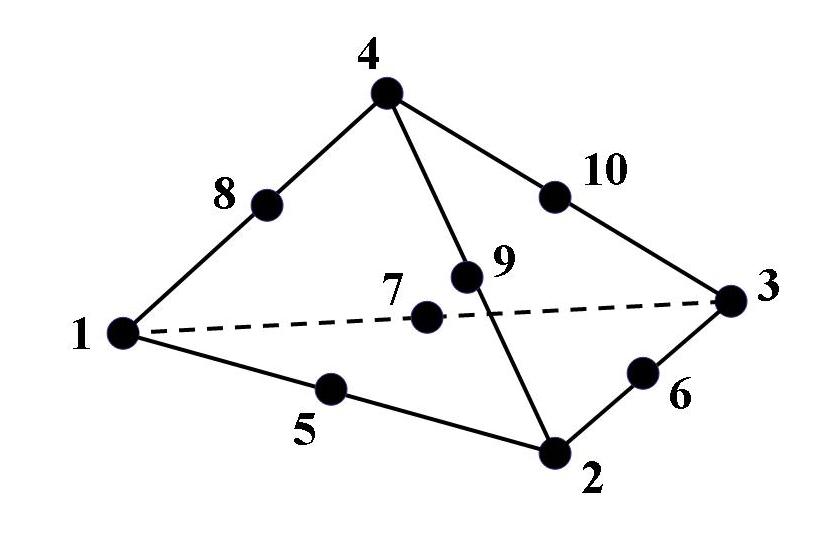
Figure 8: local node numbering for element types 25, 42
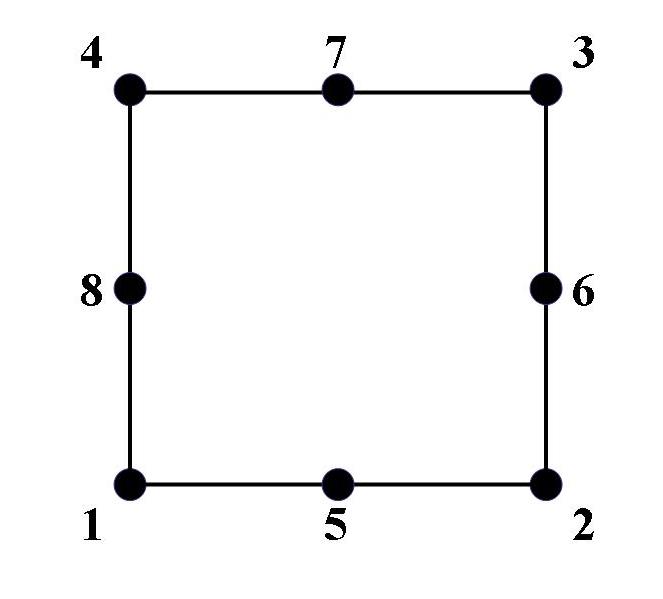
Figure 9: local node numbering for element type 32
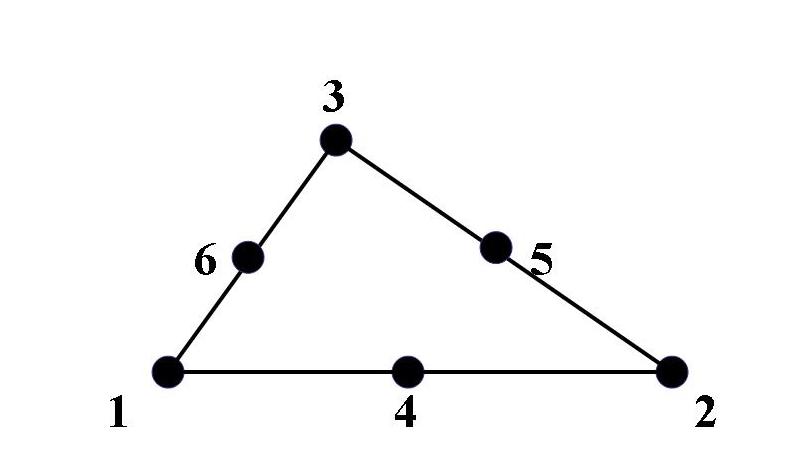
Figure 10: local node numbering for element types 38, 52
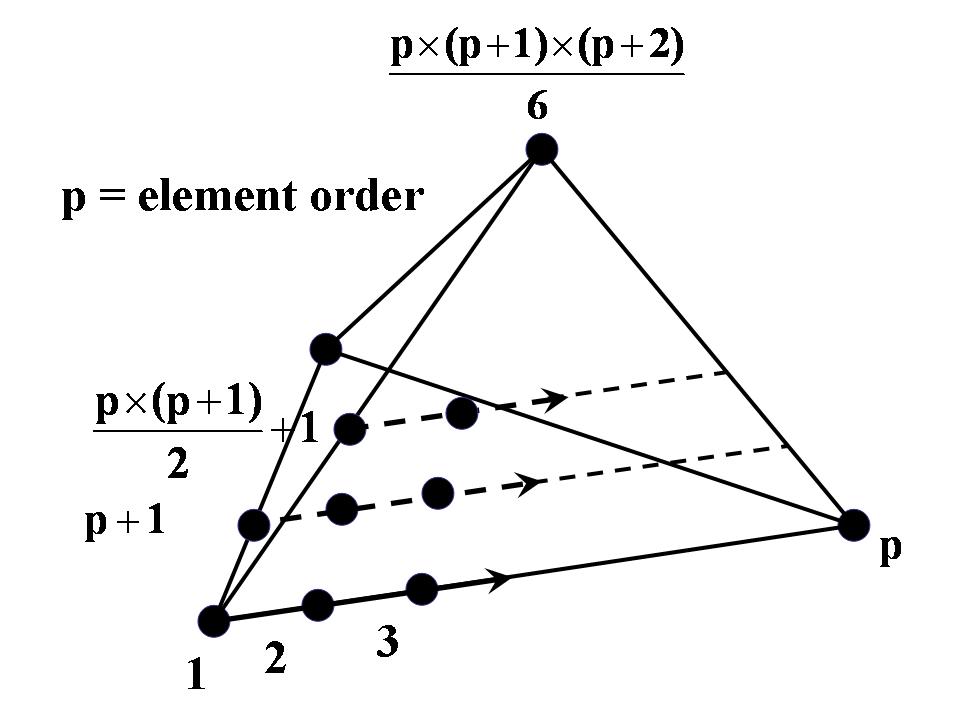
Figure 11: local node numbering for element types 50, 96, 103, 1160, 1161, 1162
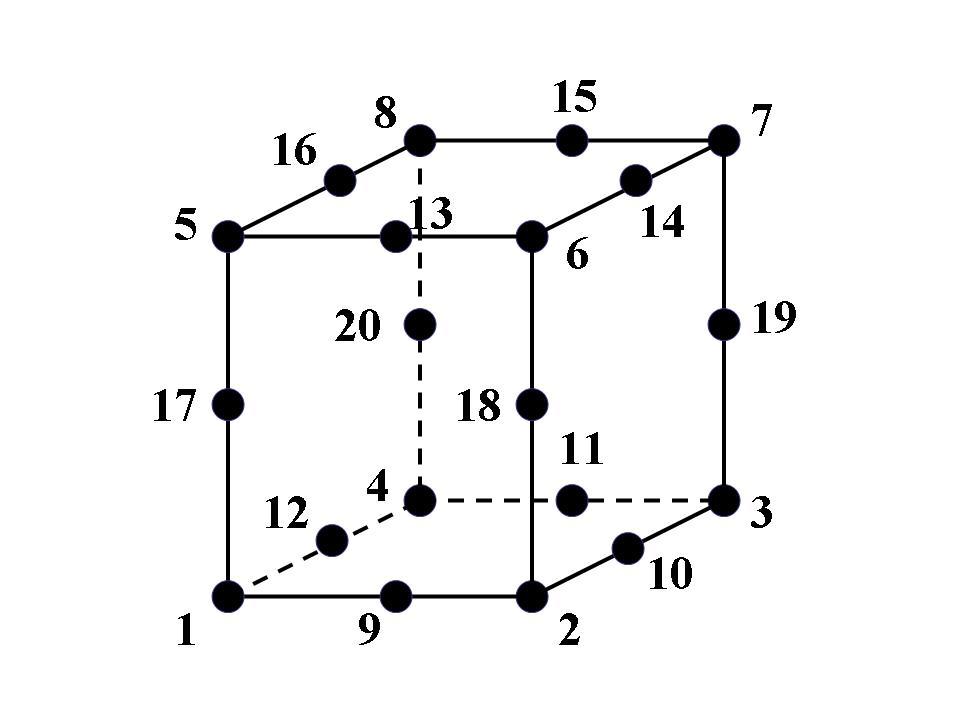
Figure 12: local node numbering for element types 71, 72
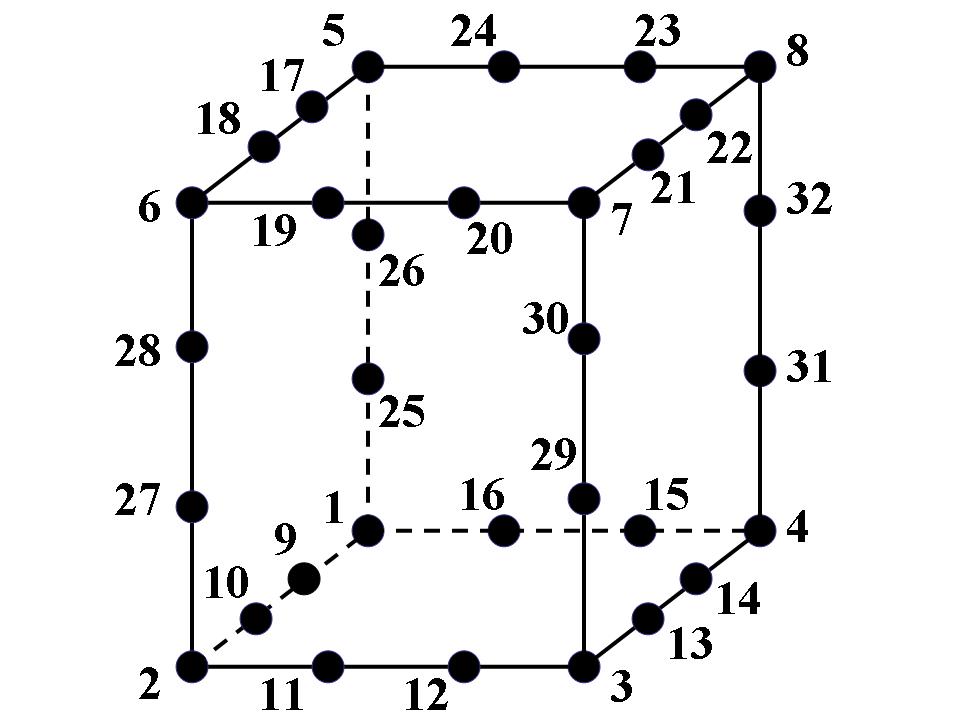
Figure 13: local node numbering for element types 74, 91, 93
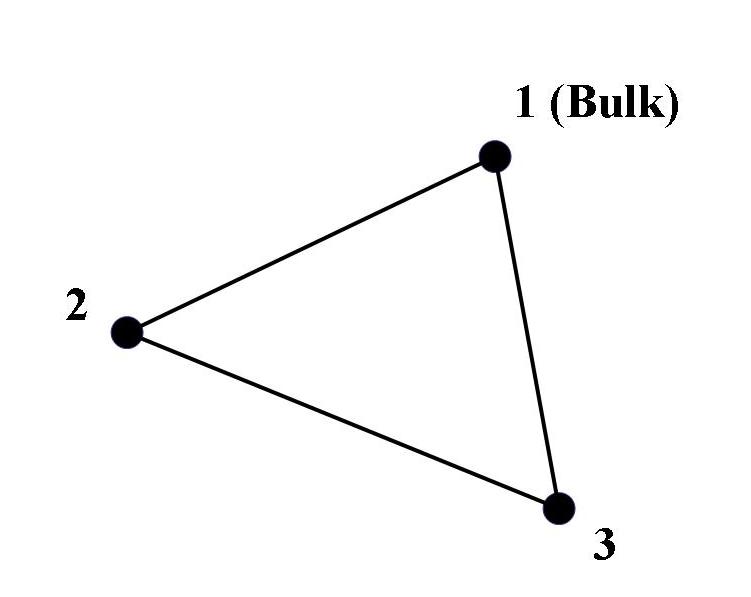
Figure 14: local node numbering for element type 84
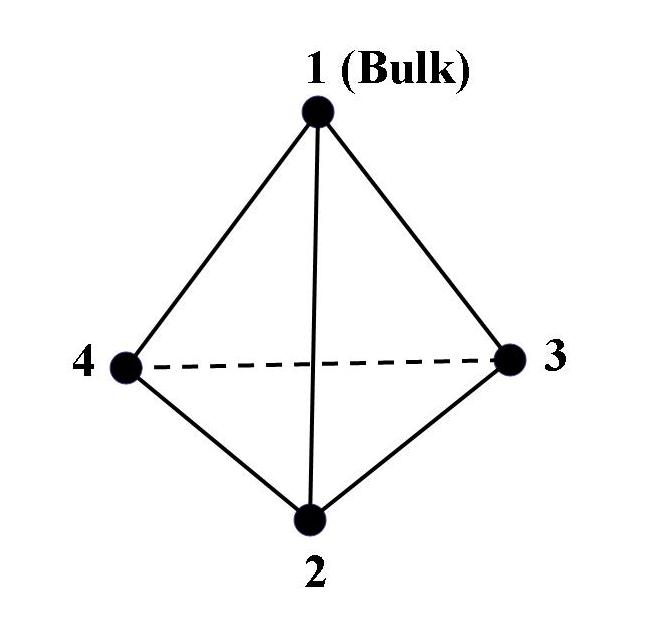
Figure 15: local node numbering for element type 85
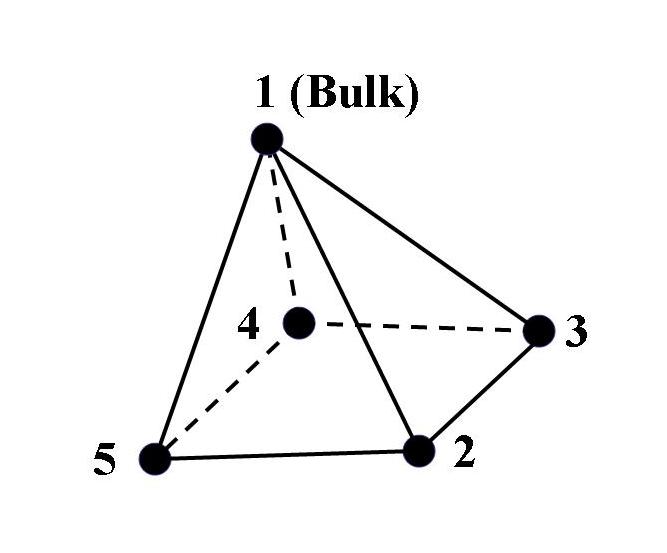
Figure 16: local node numbering for element type 86
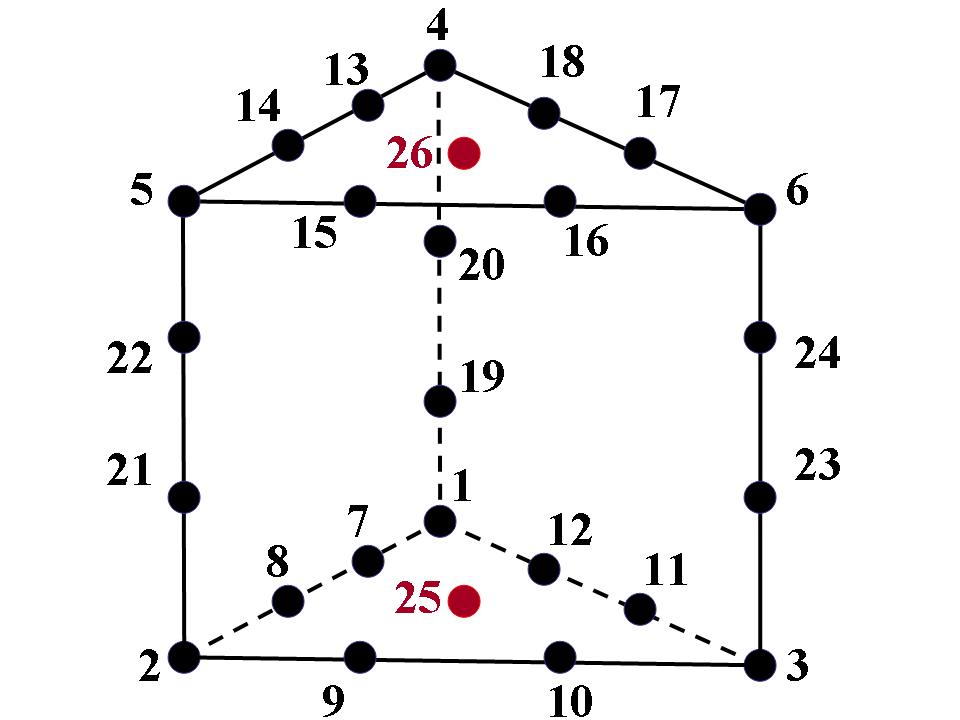
Figure 17: local node numbering for element types 92, 94
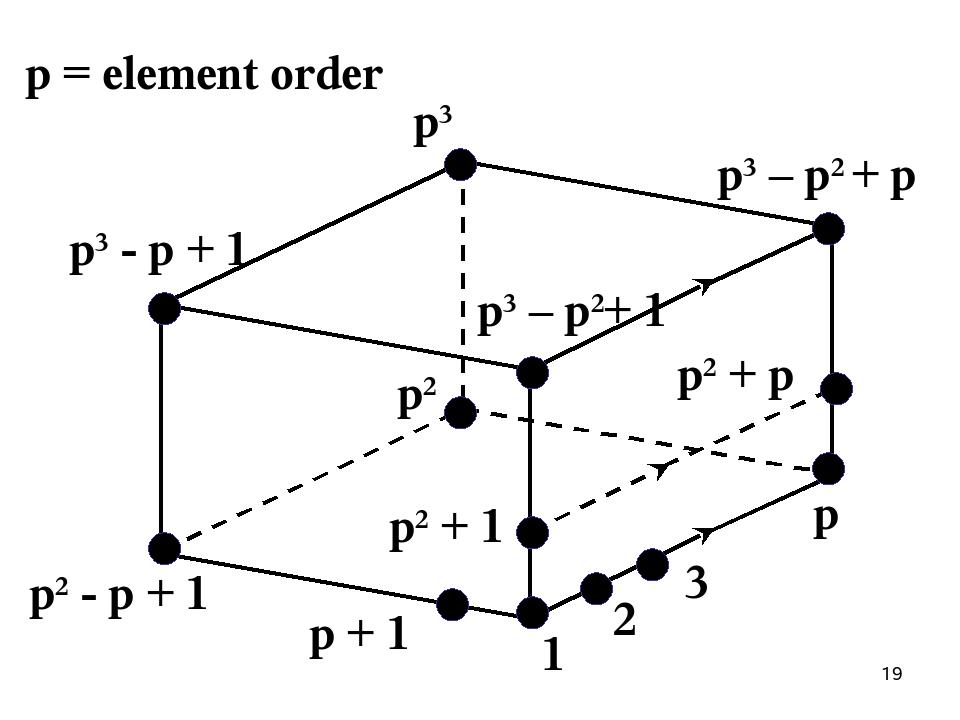
Figure
18: local node numbering for element types 95, 102, 105, 109, 1150,
1151, 1152, 1153, 1170, 1171, 1172, 1173, 1250, 1251, 1252
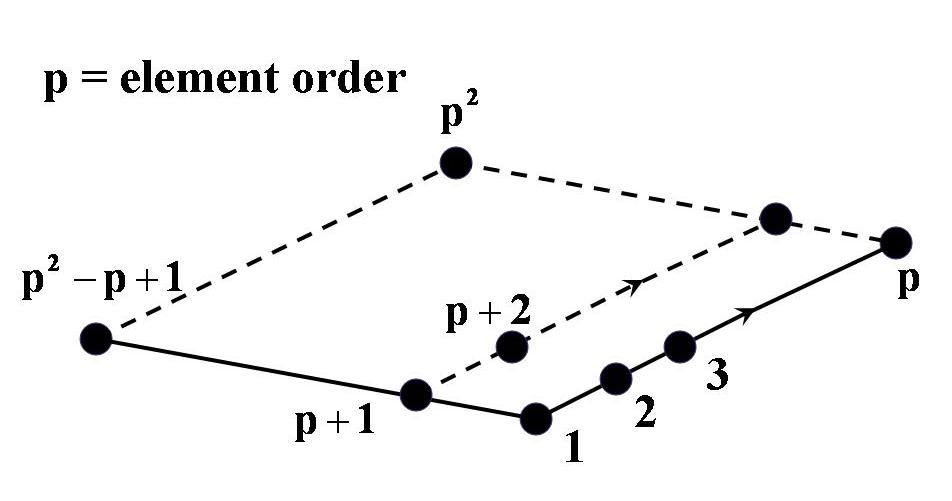
Figure 19: local node numbering for element types 98, 100, 108, 1100, 1101, 1102, 1103, 1120, 1121, 1122, 1123, 1200, 1201, 1220
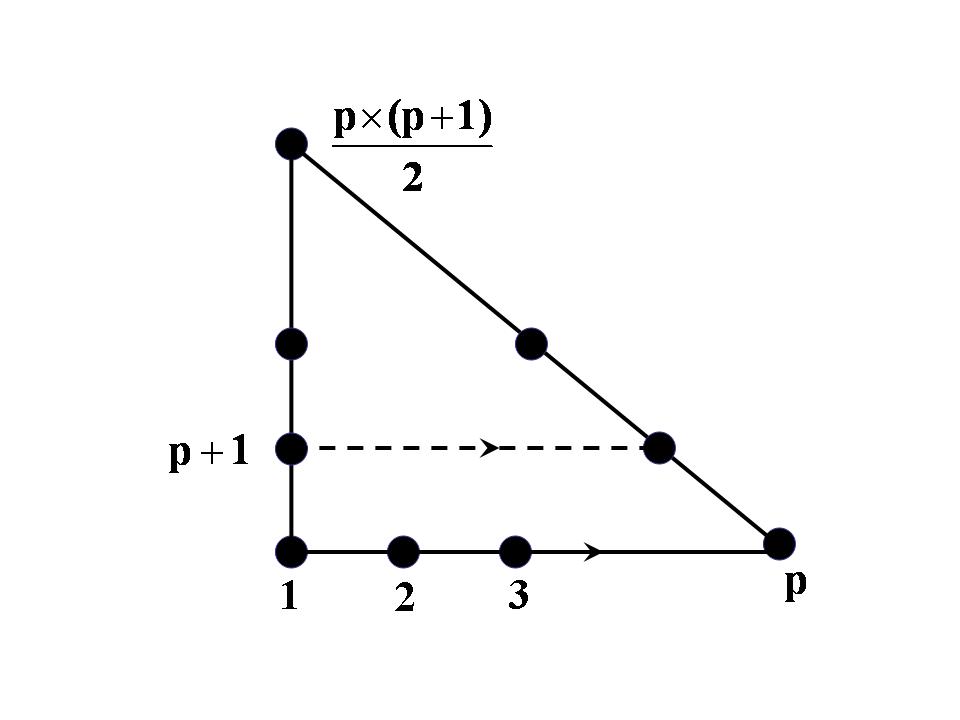
Figure 20: local node numbering for element types 99, 101, 1110, 1111, 1130, 1131
Figure 21: element types 120, 220

Figure 22: element types 122, 222
Figure 23: element types 123, 126, 223, 226, 323

Figure 24: element types 124, 224
Figure 25: element types 125, 134, 225, 234, 325
Figure 26: element type 27
Figure 27: element type 118
Figure 28: element types 121, 221
Figure 29: element types 127, 227
Figure 30: element type 119
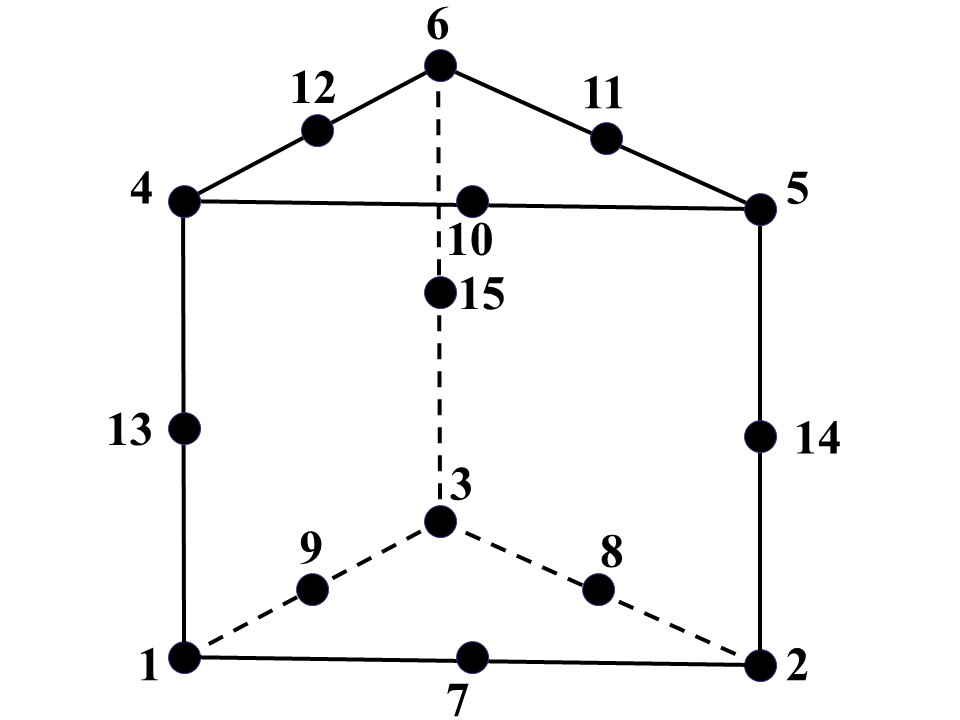
Figure 31: element type 97
36 ENABLING REDUCTION AND HYPER REDUCTION USING LOCAL REDUCED-ORDER BASES
|
Command Statement: LOCROB
|
The LOCROB command should be used to enable the reduction or hyper reduction of nonlinear structural dynamic computation
using local Reduced-Order Bases (ROBs), following the theory described in
D. Amsallem, M. Zahr and C. Farhat, "Nonlinear Model Order Reduction Based on Local Reduced-Order Bases,"
International Journal for Numerical Methods in Engineering, Vol. 92, pp. 891-916 (2012).
Note 1: Currently, AERO-S supports reduced-order computations using the method of local ROBs only for
implicit dynamic problems.
Note 2: Using a set of local ROBs instead of a single (global) ROB requires repeating in the same ASCII Input Command Data file
and for each local ROB, the commands READMODE, ATTRIBUTES, the sub-command keywords PODROB and TRNSOL
of the command RMSHC, and the sub-command keywords CENTROID and AUXI of this command.
For example, the -th occurrence of the command READMODE specifies the filename and size of the -th local ROB,
the -th occurrence of the command ATTRIBUTES specifies the element weights of the reduced mesh associated with
the -th local ROB, etc.
The input format of this command is given below.
CENTROID | <pathandfilename1>
| AUXI | <pathandfilename2>
|
|
CENTROID
| Sub-command keyword for specifying a file containing the centroid of a snapshot cluster generated by ROBC (characters).
This sub-command and its input are needed when sampling a mesh using RMSHC and local bases, or when performing a nonlinear
structural dynamic computation using local ROBs without hyper reduction.
|
<pathandfilename1>
| Path and name of a file containing the centroid of a snapshot cluster (characters).
|
AUXI
| Sub-command keyword for specifying a file containing auxiliary quantities generated by RMSHC that are required for enabling a fast online
selection of the appropriate local ROB during a nonlinear
structural dynamic computation performed using a hyper reduced
computational model (characters).
|
<pathandfilename2>
| Path and name of a file containing the auxiliary quantities required for enabling a fast online selection of
the appropriate local ROB during a computation performed using a hyper reduced nonlinear computational model
(characters).
|
37 END
The END statement is used to indicate the end-of-file.
It should always be the last statement.
38 EQUATION SOLVER CONFIGURATION
Command Statement: SOLVERCNTL SOLVER_ID
|
The main purpose of the SOLVERCNTL command statement is to support the solverhandle solver of the STATICS
command, which is nothing but a properly configured
equation solver (here, configuring an equation solver refers to setting
its parameters, if it has any). Its main benefits are two-fold:
- To enable the configuration of a multi-level FETI-DP solver, which cannot be performed within the STATICS command, and then its selection in the STATICS command as a
solverhandle solver.
- To configure outside the STATICS command, in a manner that is clearer and less prone to errors than within the STATICS command, one or multiple other equation solvers and attribute to each of them a
SOLVER_ID;
then, at each simulation of interest, one of these solverhandle solvers can be selected as needed by specifying in the STATICS command the solver solverhandle SOLVER_ID. Hence, unlike the above benefit, this one is purely for conveniency.
The input format of this command is given below.
Note 1: All METHODs and PARAMETERS specifiable in STATICS can also be specified in this command.
Note 2: Specifying a FETI-DP solver as a coarse solver of a
global FETI-DP solver, including recursively, corresponds to configuring
a multi-level FETI-DP solver.
In this case:
- The original subdomains are treated as superelements and these are
rearranged recursively into coarse-level-subdomains at each coarse level
where the coarse solver is specified to be
FETI DP.
- For a two-level FETI-DP solver, the number of
coarse-level-subdomains is by default the number of MPI processes, and
each coarse-level-subdomain is constructed as the agglomeration of the
original
subdomains assigned to an MPI process. Alternatively, a coarse-level
mesh decomposition can be specified for each coarse level by including
in the directory where the simulation is launched a file named
decomposition.N, with
the integer N being the number of subdomains in the previous level mesh
decomposition. The format of this file is the same as that of the
original decomposition file.
- For a three-or-higher-level FETI-DP solver, a coarse-level mesh
decomposition must be specified for each coarse level except the last
one. At the last coarse level, the default setting described above
applies,
but the user can also specify an alternative mesh partition even at this
coarse level by inputting the corresponding file as described above.
- At each coarse level, an agglomerated coarse subdomain must
consist of subdomains of a previous decompositon that were assigned to
the same CPU. Hence, a user who wishes to input a specific
"decomposition.N" file
must have knowledge of the content of the CPUMAP file described in BINARY in order to satisfy this requirement (which is otherwise automatically satisfied by each default mesh decomposition).
- Only primal augmentation is supported (see STATICS).
SOLVER_ID
| Non-negative integer which identifies
explicitly a configured equation solver – that is, an equation solver
and a set of values for its parameters, when applicable (integer). This
equation
solver can be selected in STATICS as the solver solverhandle SOLVER_ID.
|
METHOD
| See STATICS. Any METHOD that can be specified and configured in STATICS can also be specified and configured here.
|
PARAMETERS
| See STATICS. Any solver parameter that can be specified in STATICS can also be specified here. However, only the parameters relevant to the equation solver specified in METHOD above
should be specified here.
|
39 FIELD WEIGHTS FOR MESH DECOMPOSITION
|
Command Statement: FWEIGHTS
|
In order to achieve load balancing when generating a mesh partition, the second-step of the non-trivial
mesh partitioning strategy (see DECOMPOSE) accounts for the different weights (or weighting coefficients, see WEIGHTS)
attributed to the elements of the given mesh according to their type (see TOPOLOGY). The default values attributed
by AERO-S to these elements types are based on
their relative computational complexity. For each different field — that is, Mechanic, Heat, Coupled Thermoelastic,
Fluid, or Acoustic — these weights range between 1 and some higher value that is field-dependent.
The command WEIGHTS can be used to reset, if desired, some or all of these weights to some user-specified values.
For a multidisciplinary simulation such as fluid-structure using AERO-S alone, the command FWEIGHTS
can be used to attribute to each involved field (for example, Mechanic and Acoustic) a weight to
allow DECOMPOSE to account additionally for the relative computational complexity of a typical element of this
field to those of the typical elements of the other fields involved in the simulation. In this case, the weight  of each element type (whether its default value or that set using WEIGHTS) is automatically reset by
AERO-S to the ratio
of each element type (whether its default value or that set using WEIGHTS) is automatically reset by
AERO-S to the ratio
where  is the weight of the field of element type
is the weight of the field of element type  , the scope of
, the scope of  is defined by all fields
specified using this command.
is defined by all fields
specified using this command.
The input format of this command is given below.
ACOU | acou_weight
| FLUI | flui_weight
| MECH | mech_weight
| HEAT | heat_weight
|
|
ACOU
| Sub-command keyword for specifying a weight to the field Acoustic (see TOPOLOGY).
|
acou_weight
| Weight to be attributed to the field Acoustic (real).
|
FLUI
| Sub-command keyword for specifying a weight to the field Fluid (see TOPOLOGY).
|
flui_weight
| Weight to be attributed to the field Fluid (real).
|
MECH
| Sub-command keyword for specifying a weight to the field Mechanic (see TOPOLOGY).
|
mech_weight
| Weight to be attributed to the field Mechanic (real).
|
HEAT
| Sub-command keyword for specifying a weight to the field Heat (see TOPOLOGY).
|
heat_weight
| Weight to be attributed to the field Heat (real).
|
40 FLUID/STRUCTURE INTERFACE
|
Command Statement: FSINTERFACE
|
The FSINTERFACE command statement can be used to
define the fluid/structure interface in a coupled elastoacoustic
frequency
response problem where: (1) the computational acoustic fluid and
structural domains are discretized using either a single mesh, or two
different meshes
with matching or non-matching discrete interfaces, and (2) in either
case, each of these two computational domains has its own representation
of the fluid/structure interface in the form of a discrete surface
defined using SURFACETOPO. In this scenario, the command statement FSINTERFACE is
used to define more specifically the fluid/structure interface as the pairing of these two surfaces.
The input format of this command is given below.
Note 1: In this case, the capabilities of the ACME library are used to generate the fluid-structure coupling coefficients.
SURF_PAIR_ID# FLUID_SURF STR_SURF
|
or
SURF_PAIR_ID# FLUID_SURF STR_SURF NORMAL_TOL TANGENTIAL_TOL
|
SURF_PAIR_ID#
| Id number of the surface pair to be described (integer).
|
FLUID_SURF
| Identification of the fluid surface (see SURFACETOPO) (integer).
|
STR_SURF
| Identification of the structure surface (see SURFACETOPO) (integer).
|
NORMAL_TOL
| Normal search tolerance used by ACME to identify interactions, default value is 0.1 (float) (see Figs. 1.2 and 1.3 in
Section 1.3 of ACME's User Reference Manual).
|
TANGENTIAL_TOL
| Tangential search tolerance used by ACME to identify interactions, default value is 0.001 (float) (see Figs. 1.2 and 1.3 in
Section 1.3 of ACME's User Reference Manual).
|
41 FORCE TIME TABLE-MECHANICS AND ACOUSTICS
Command Statement: MFTT [TABLE_ID]
|
The MFTT command statement can be used to implement time-dependent tensor-product forms of the boundary
conditions enforced by the commands FORCE, ATDDNB, ATDROB, and PRESSURE.
Pairs of time and amplification values are input. Linear interpolation is also used for “in between” points.
When applied with the FORCE command, the result is the amplification of the force value.
When applied with the ATDDNB command, the result is the amplification of the resulting distributed
Neumann boundary condition. When applied with the ATDROB command, the result is the amplification
of the right hand-side of the distributed Robin boundary condition.
TIME_1 AMP_1
. .
. .
. .
TIME_n AMP_n
|
TABLE_ID
| Optional non-negative integer
which uniquely identifies a force-time table so that it can be
associated with a "load" set to define the "load" case for a dynamic
analysis using
the LOADCASE command. The default value is 0. Hence, the MFTT command can be repeated as many times as desired within the same input file using
each time a different value for TABLE_ID and different data.
|
TIME_1
| A specified time point (float).
|
AMP_1
| A specified amplification value at time point TIME_1 (float). This amplification factor is automatically set to zero for all times prior to the earliest specified time point
and all times later than the latest specified time point.
|
42 GEOMETRIC RIGID BODY MODES
A singular finite element stiffness matrix arises in a linear or
nonlinear static or quasistatic analysis, or in an eigen analysis,
if, for example, any of the following conditions are encountered:
- The underlying problem is formulated without sufficient Dirichlet boundary conditions.
- The finite element model contains mechanisms or other oddities that generate singularities.
- The underlying problem contains redundant constraints and the Lagrange multiplier method is chosen for enforcing them (see CONSTRAINTS).
In this case:
- In the context of a linear static or quasistatic analysis, the
GRBM command can be used to:
- Determine the rigid body modes of the prevailing stiffness matrix that are due to a lack of sufficient Dirichlet
boundary conditions or LMPCs to guarantee its invertibility.
- Assist, using the above information, the direct equation solvers
sparse and skyline, and, to some extent,
the iterative solver FETI-DP (see STATICS and Note 4 below) in solving the admissible system of linear
equations governed by this singular matrix. For an EIGEN analysis however, this assistance is performed only when the
shift is zero.
- In the context of an EIGEN (structural) analysis, the
GRBM command can be used to:
- Determine the rigid body modes of the prevailing stiffness matrix that are due to a lack of sufficient
Dirichlet boundary conditions or LMPCs to guarantee its invertibility.
- Use the above information to assist, if no shifting is requested (see EIGEN), the direct equation solvers
sparse
and skyline and, to some extent, the iterative solver FETI-DP (see STATICS and Note 4 below), in solving
the admissible system of linear equations governed by this singular matrix each time they are called by the chosen eigensolver.
Specifically, this command has two distinct effects:
- It requests the computation of the rigid body modes of an unrestrained, partially
restrained, or even restrained finite element model using the hybrid geometric-algebraic method published
in C. Farhat and M. Geradin, "On the General Solution by a Direct Method of
a Large-Scale Singular System of Linear Equations: Application to the Analysis of Floating Structures," International
Journal for Numerical Methods in Engineering, Vol. 41, pp. 675-696 (1998). This hybrid method combines a geometry-based
algorithm and the SVD factorization of the matrix of constraints associated with any specified boundary conditions and/or
LMPCs. The SVD factorization relies on the first tolerance specified under this command for identifying the deemed
singular values associated with the rigid body modes due to insufficient Dirichlet boundary conditions or LMPCs.
In this case, AERO-S prints on the screen the total number of rigid body modes discovered by
GRBM.
Then, the rigid body modes themselves are used, for example, to assist the RBMFILTER command, or support the EIGEN
command. This first aspect of the GRBM command is independent however of the solution method specified in STATICS.
- When the direct method
sparse or skyline is selected under the STATICS command as the equation solver,
this command triggers the computation of the generalized inverse of the singular finite element stiffness matrix in
factored form using the algorithm also published in C. Farhat and M. Geradin, "On the General Solution by a Direct Method of
a Large-Scale Singular System of Linear Equations: Application to the Analysis of Floating Structures," International
Journal for Numerical Methods in Engineering, Vol. 41, pp. 675-696 (1998). This algorithm relies on the information
computed by the hybrid geometric-algebraic method outlined above — that is, the number of rigid body modes,
and in some cases, the rigid body modes themselves, discovered and constructed by GRBM.
In some cases, a finite element matrix can have a larger number of singularities (also known as nullities) than that
due to the presence of rigid body modes. This is true, for example, when the finite element model contains mechanisms.
To address this issue, when the GRBM command is specified and skyline or sparse is chosen in STATICS
as
the equation solver, the generalized inverse of the stiffness matrix is
computed in factored form using the aforementioned hybrid
geometric-algebraic algorithm, and its pivots are monitored for small values using the second tolerance specified under this
command. When these small values are correctly deemed to be zero pivot values, the solvers skyline and sparse
capture the additional singular modes due to mechanisms or other model oddities.
Note 1: See TRBM for an alternative method for analyzing singular systems. Note however that whereas the rigid body modes
computed by the GRBM command are "pure" translational and rotational modes, those computed using the TRBM command
may be linear combinations of translational and rotational modes.
Note 2: This command can be used together with the TRBM command. If both GRBM and TRBM commands are specified
in the same AERO-S ASCII Input Command Data file, then:
- If the analysis to be performed is a linear static or quasistatic analysis and the equation solver specified in
STATICS is the
sparse or skyline solver, or if this analysis is an eigen (structural) analysis,
GRBM can be used to (see also Note 4 below regarding the case of the iterative solver FETI-DP):
- Determine the rigid body modes of the prevailing stiffness matrix that
are due to a lack of sufficient Dirichlet boundary conditions or LMPCs to guarantee the invertibility of this matrix.
- Assist the direct equation solvers
sparse and skyline (see STATICS) in solving the admissible system
of linear equations governed by this singular matrix. For an EIGEN analysis, this assistance is performed however only
when the shift is zero.
Therefore the TRBM command is ignored in this case.
- Otherwise:
GRBM is used to determine, for the purpose of information and only for this purpose, the rigid body modes
of the prevailing stiffness matrix that are due to a lack of sufficient Dirichlet
boundary conditions or LMPCs to guarantee the invertibility of this matrix.
- TRBM is used to assist the direct equation solver specified in STATICS in solving the admissible system of
linear equations governed by this singular matrix.
Note 3: In some cases, the tangent stiffness matrix associated with an unrestrained or partially restrained nonlinear
finite element model can have fewer rigid body modes than that which can be predicted for its linear
finite element model counterpart. For this reason, the GRBM command cannot reliably assist the direct equation
solvers sparse and skyline (see STATICS) in solving singular system of linearized equations
associated with a nonlinear finite element analysis. In this case, the alternative TRBM command should be use
for this purpose.
Note 4: If a FETI-1 or FETI-2 solver is specified under STATICS, the rigid body modes of the floating subdomains are
computed using the same hybrid geometric-algebraic method and their singular matrices are factored using the same
aforementioned algorithm (see the subsection of STATICS focused on FETI parameters). If a FETI-DP solver is
specified under STATICS, the first tolerance specified under this command is used for detecting and computing
the rigid body modes of the global stiffness matrix.
or
 
| By default, the implementation of the hybrid geometric-algebraic method underlying this command computes
the rotational rigid body modes by rotating the structure about the node of the mesh with the smallest ID number.
However, this option can be used to specify a different point about which to rotate this model for the
aforementioned purpose (for example, its center of gravity), by inputting the , and coordinates of
this point.
|
VALUE_1
| Tolerance for identifying the zero singular values of the constraint matrix analyzed by the hybrid
geometric-algebraic method for finding the rigid body modes of a finite element model (real).
Its default value is 1.0e-6.
|
VALUE_2
| Tolerance for capturing algebraically the mechanisms and other model oddities that cause a finite element
stiffness matrix to be singular, and which cannot be detected by the geometric-algebraic method alone
(real). Its default value is 1.0e-16.
|
VALUE_3
| Optional integer parameter for the case where the problem contains LMPCs. It can take either of the following
two values:
VALUE_3 = 0. In this case, the nodes involved in each LMPC are assumed to be fully connected
in the same way, for example, as nodes which are connected by beam elements. In this case:
- The
GRBM command can be processed much faster than otherwise.
- However, it may also underestimate or overestimate the total number of rigid body modes.
If it underestimates it, the direct equation solvers
sparse and skyline (see STATICS) can
be expected to recover nevertheless the correct total number of rigid body modes of the singular system they
are applied to, because they automatically monitor the small pivots during the factorization of the governing
matrix using the tolerance VALUE_2. On the other hand, if GRBM overestimates the total number of
rigid body modes, these direct solvers will recover in general the wrong rigid body modes and
therefore deliver an incorrect solution of the linear singular system of equations to which they are applied.
For this reason, this setting of VALUE_3 should be used with care — that is, when the user has sufficient
insight in the problem to be solved to conclude that GRBM may at worst underestimate the correct number of
rigid body modes. For example, this setting is perfectly safe for a problem where two bodies
are connected with tied surfaces and therefore is recommended for this case.
VALUE_3 = 1 (default value). In this case, the above assumption about GRBM and LMPCs
is not made. For this reason, GRBM is in general more reliable when VALUE_3 is set to 1,
but its processing may be computationally more intensive in this case.
|
43 GEOMETRIC STIFFENING DUE TO PRESTRESS
The GEPS command statement is essentially a switch that turns on
the accounting of pre-stress effects in the form of a geometric stiffness
matrix . This geometric stiffness matrix is computed around a
displacement field specified under the IDISP6 command which must
be present in the input file. A sample input file illustrating the use
of GEPS can be found in FEM.d/fem_examples/Buckle.d/
The effect of this switch on the EIGEN command statement is
to replace the stiffness matrix by the tangent stiffness matrix and
therefore compute the modes of the structure around the deformed
position implied by the displacement field specified under the IDISP6 command.
Its effect on the DYNAMICS and STATICS commands is to replace the
stiffness matrix by the tangent stiffness matrix around the displacement field
specified under the IDISP6 command, including in aeroelastic
applications.
Note 1: The GEPS command can be used in any linear analysis that is not a modal analysis, and in an EIGEN analysis.
Note 2: The theory underlying the effect of initial stress involves three different configurations:
the pre-stress-free configuration  , the pre-stressed configuration , and the deformed configuration
obtained after applying a loading to . In principle, the passage from to could involve
large displacements, rotations, and/or deformations, but the passage from to is restricted to
small displacements and rotations. This principle defines the scope for the
, the pre-stressed configuration , and the deformed configuration
obtained after applying a loading to . In principle, the passage from to could involve
large displacements, rotations, and/or deformations, but the passage from to is restricted to
small displacements and rotations. This principle defines the scope for the GEPS command. In AERO-S,
an analysis which accounts for pre-stress effects using this command is performed using the geometry of , the
displacement field (including rotations, when applicable) that defines the passage from to , and any set of
external loads that does not include the loads responsible for the passage from to . Therefore, any
outcome of an analysis using the GEPS command — including that outputted in OUTPUT — should be interpreted
as an incremental outcome which can be superposed to the outcome associated with or responsible for the passage from to .
Note 3: The PRELOAD command defines a related capability which nevertheless differs in two important
aspects. Firstly, an analysis using the PRELOAD command is performed on the geometry of . Secondly and more importantly,
the PRELOAD command can be used in all of linear, nonlinear, static, transient, and eigen analyses. However, preloads can be
currently inputted to truss and membrane elements only.
Note 4: If an aeroelastic analysis is requested with all of the GEPS, IDISP6, and IDISPLACEMENTS commands present in the input file, AERO-S interprets
the IDISPLACEMENTS command and its content as the initialization of the incremental displacement field from the configuration to the configuration . In this case, it sends to the
fluid code at each time-step the sum of the updated incremental displacement and the displacement inputted under the IDISP6
command. Hence, this scenario is particularly suitable
for the case where the fluid code is started from an updated CFD mesh
position. If on the other hand an aeroelastic analysis is requested
with only the GEPS and IDISP6 commands present in the input file, AERO-S
understands that the incremental displacement field is initialized to
zero. However, it communicates
in this case with the fluid code in a very special manner: at the first
time-step, it sends to the fluid code the initial value of the
incremental displacement field (which in this case is zero),
and at each subsequent time-step, the sum of the updated incremental
displacement and the displacement specified under the IDISP6 command. Hence, the latter scenario is particularly suitable
for the case where the fluid code is started from an undeformed CFD mesh.
44 GLOBAL SIMULATION PARAMETERS
|
Command Statement: PARAMETERS
|
The PARAMETERS command can be used to set some global parameters of a simulation of interest.
Its input format is given below.
ACME
| Sub-command keyword for specifying the mode of execution of the contact search algorithm of the ACME library (characters).
|
flagACME
| Specifies the mode of execution of the contact search algorithm of the ACME library (integer). Three choices are available:
|
0
| Sequential (default). Currently, this is the only choice available for the mortar method.
|
1
| Parallel with centralized input on the host machine.
|
2
| Parallel with distributed input.
This option requires a specialized decomposition where a pair of master
and slave entities must be in the same subdomain.
|
AGRESSIVE_TOLERANCES
| Sub-command keyword for activating an aggressive
automatic determination of the contact search tolerances, when this
search is performed using the ACME library (characters). In this
context, the term aggressive implies that the tolerances are set
less conservatively in an attempt to reduce the cost of the contact
search, possibly sacrificing some robustness.
|
ANDES_ALPHA
| Sub-command keyword for specifying the algorithmic parameter for shell elements 15 and 1515 (characters).
|
| Specifies the value of the algorithmic parameter for shell elements 15 and 1515 (real). The default value is 1.5. For thin shells with high membrane stresses, the 0 value is
recommended.
|
ANDES_BETAB
| Sub-command keyword for specifying the algorithmic parameter  for shell elements 15 and 1515 (characters). for shell elements 15 and 1515 (characters).
|
| Specifies the value of the algorithmic parameter for shell elements 15 and 1515 (real). The default value is 1.
|
ANDES_BETAM
| Sub-command keyword for specifying the algorithmic parameter  for shell elements 15 and 1515 (characters). for shell elements 15 and 1515 (characters).
|
| Specifies the value of the algorithmic parameter
for shell elements 15 and 1515 (real). The default value is 0.32. For
very thin shells with high membrane stresses, the 0 value is
recommended.
|
ANDES_CLR
| Sub-command keyword for specifying the algorithmic parameter clr for shell elements 15 and 1515 (characters).
|
clr
| Specifies the value of the algorithmic parameter clr for shell elements 15 and 1515 (real). The default value is 0.
|
ANDES_CQR
| Sub-command keyword for specifying the algorithmic parameter cqr for shell elements 15 and 1515 (characters).
|
cqr
| Specifies the value of the algorithmic parameter cqr for shell elements 15 and 1515 (real). The default value is 1.
|
AUTO_TOL
| Sub-command keyword for
activating an automatic determination of the contact tolerances, when
contact search is performed using the ACME library(characters).
|
DEFAULT_PENALTY
| Sub-command keyword for
activating the default penalty parameter when contact enforcement is
performed using the ACME library (characters). In this case, the penalty
parameter specified in
the AERO-S Input Command Data file is ignored.
|
GLOBAL_SEARCH_CULL
| Sub-command keyword for
activating the following contact search option when contact search is
performed using the ACME library (characters). When this option is
activated, a full contact
search is performed only once; subsequent searches can update
existing interactions but cannot find new ones.
|
MORTAR_INTEGRATION
| Sub-command keyword for specifying the number of integration points to be used for the mortar method (characters).
|
numPTS
| Specifies the number of
integration points to be used in the mortar method (integer). Six
choices are avaliable: 1, 3, 6 (default value), 7, 12 and 16.
|
MORTAR_SCALING
| Sub-command keyword for specifying a scaling of the constraint function in the mortar method (characters).
|
scalingFCT
| Scaling factor to be applied to the constraint function in the mortar method (real). The default value is 1.
|
NLMEM_PTYPE
| Sub-command keyword for
specifying how the pressure load is to be defined for nonlinear membrane
elements 128 and 129 (characters).
|
flagPRS
| Specifies how the pressure load
is to be defined for nonlinear membrane elements 128 and 129 (integer).
Two choices are available:
|
0
| In this case (which is the default case), the pressure is defined as the force per unit area , where is the area in the current/updated configuration.
|
1
| In this case, the pressure is defined as the force per unit area  , where is the area in the reference/undeformed configuration.
Note that for the pressure defined on element faces identified using the SURFACETOPO command, or on elements other than elements 128 and 129, this is the only definition of pressure
currently available. , where is the area in the reference/undeformed configuration.
Note that for the pressure defined on element faces identified using the SURFACETOPO command, or on elements other than elements 128 and 129, this is the only definition of pressure
currently available.
|
NO_GHOSTING
| Sub-command keyword for deactivating ghosting in a contact search performed using the ACME library (characters).
|
NO_MULTIPLE_INTERACTIONS
| Sub-command keyword for
disabling multiple interactions in the contact search, when this search
is performed using the ACME library (characters).
|
NO_NORMAL_SMOOTHING
| Sub-command keyword for
deactivating normal smoothing in the contact search, when this search is
performed using the ACME library (characters).
|
NO_SECONDARY
| Sub-command keyword for deactivating the secondary decomposition in the contact search of the ACME library (characters).
|
NO_WARPED_VOLUME
| Sub-command keyword for
activating an option to accelerate contact search when using the ACME
library (characters). This option should be activated only when none of
the quadrilateral
faces of the contact or tied surfaces are initially warped or can
become warped during the simulation.
|
OLD_DYNAMIC_SEARCH
| Sub-command keyword for
disabling the so-called new augmented method for contact search when
this search is performed using the ACME library (characters).
|
PARTITION_GAP
| Sub-command keyword for
activating the following option in the contact search, when this search
is performed using the ACME library (characters). The purpose of this
option is to partition a
gap into the part that occurs durring the current computational
time-step and that which pre-existed at the previous computational
time-step.
|
RESOLUTION_TYPE
| Sub-command keyword for
specifying the type of normal smoothing in contact when the contact
search is performed using the ACME library (characters).
|
flagRT
| Specifies the type of normal
smoothing (integer): 0 specifies that a node-based normal is to be used,
while 1 (which is the default value) specifies that an edge-based
normal is
to be used.
|
SHARP_NON_SHARP_ANGLE
| Sub-command keyword for
specifying the minimum angle parameter used for multiple interactions
and normal smoothing when contact search is performed using the ACME
library (characters).
|
theta
| Specifies the value of the minimum angle parameter in degrees (float). The default value is 30 degrees.
|
SHELL_SIMPLE_LOFTING
| Sub-command keyword for
activating an alternative simplified lofting algorithm in the contact
search of the ACME library (characters).
|
SKIP_PHYSICAL_FACES
| Sub-command keyword for
activating the following option in the contact search, when this search
is performed using the ACME library (characters). This option disables a
feature of the ACME
library designed to identify certain corner cases that may be
difficult for the search algorithm to otherwise handle.
|
45 GRAVITATIONAL ACCELERATION
|
Command Statement: GRAVITY
|
The GRAVITY command is used to specify directional
gravitational acceleration constants. The input format is given below.
Note 1: By default, AERO-S computes all element gravity loads by a consistent approach,
except for explicit dynamic computations (see DYNAMICS), in which case AERO-S always uses
a lumped approach for this purpose. If a consistent mass matrix is not available for a particular element (see TOPOLOGY),
then AERO-S uses in all cases a lumped gravity load for that element.
Alternatively, the LUMPED command can be used to instruct AERO-S to compute all element mass matrices and
gravity loads by a lumped approach.
COEFF_X
| Gravitational Acceleration Constant in the X direction.
|
COEFF_Y
| Gravitational Acceleration Constant in the Y direction.
|
COEFF_Z
| Gravitational Acceleration Constant in the Z direction.
|
46 GROUPS
|
Command Statement: GROUPS
|
The GROUPS command can be used to organize elements into groups according to their
attribute number (see ATTRIBUTES), and nodes into groups according to the integer number identifying them or the
surface to which they belong (see SURFACETOPO). For example, the notion of a group of elements is used by the RANDOM command to
attribute a defined random material property to a group of elements. That of a group of nodes is
used by the OUTPUT command to output computed results for groups of nodes.
Note 1: Group identifiers must be contiguous integers starting from 1.
or
A STARTING_ATTRIBUTE# ENDING_ATTRIBUTE# GROUP#
|
or
or
N STARTING_NODE# ENDING_NODE# GROUP#
|
or
N SURFACE SURFACE# GROUP#
|
A
| Sub-command keyword (character) signaling that elements are to be grouped according to their attribute number — that is,
all elements whose attribute is the same as ATTRIBUTE# or within the
range [STARTING_ATTRIBUTE#, ENDING_ATTRIBUTE#] are to be put in the same group GROUP#.
|
ATTRIBUTE#
| Attribute ID number of the elements to be placed in the same group GROUP# (integer).
|
STARTING_ATTRIBUTE#
| First attribute ID number of a sequence of attribute ID numbers that define the group GROUP# (integer).
|
ENDING_ATTRIBUTE#
| Last attribute ID number of a sequence of attribute ID numbers that define the group GROUP# (integer).
|
N
| Sub-command keyword (character) signaling that nodes are to be grouped according to their node identifying number —
that is, the node whose identifying number is NODE# or all nodes whose identifying numbers are within the
range [STARTING_NODE#, ENDING_NODE#] are to be put in the same group GROUP#.
|
N SURFACE
| Sub-command keywords (characters) signaling that nodes are to be grouped according to the surface to which they belong, and
therefore according to the integer number identifying that surface (see SURFACETOPO).
|
NODE#
| ID number of the node to be placed in the group GROUP# (integer).
|
STARTING_NODE#
| First node ID number of a sequence of node ID numbers that define the group GROUP# (integer).
|
ENDING_ATTRIBUTE#
| Last node ID number of a sequence of node ID numbers that define the group GROUP# (integer).
|
GROUP#
| Group ID number of the constructed group of elements or nodes (integer).
|
47 HEAT CONDUCTION COEFFICIENT-TEMPERATURE TABLE
The CCTT command can be used to describe, for a
given material, the evolution of the heat conduction coefficient with
temperature. This evolution can be
specified here in a curve (or one-dimensional table) defined by pairs of
heat conduction coefficient and temperature values. Linear
interpolation is used for "in between" points,
and the extrema values are adopted for "outside" points. Several curves
can be specified, one after the other. Each curve is identified by an
ID number as described below.
Note 1: Currently, this command is supported only by the 4-noded tetrahedral termal element (type 50).
CURVE | curve_id
| T_1 | k_1
| | . |
| | . |
| | . |
| T_n | k_n
|
|
CURVE
| Sub-command keyword (characters)
that signals the definition of a heat conduction
coefficient-temperature curve (or one-dimensional table).
|
curve_id
| ID number for the following curve (or one-dimensional table) (integer).
|
T_i
| A specified temperature value (real).
|
YM_i
| A specified heat conduction coefficient value at temperature T_i (real).
|
48 HEAT ZERO ENERGY MODE
This command is effective only for quasistatic and transient thermal, thermoelastic, and aerothermal analyses involving
thermal zero energy modes — that is, a singular conductivity matrix — when the equation solver specified under the
STATICS command is the sparse or skyline solver. In this case, the constant temperature mode
and the generalized inverse of the conductivity matrix are computed using a hybrid physics-algebraic algorithm,
rather than the tolerance-based algorithm associated with the TRBM command.
49 HEAT ZERO ENERGY MODES FILTER
|
Command Statement: HZEMFILTER
|
This command is effective for thermal simulations involving
thermal zero energy modes. When this command is specified in the input
file and the thermal problem contains zero energy modes, a non-trivial projector is constructed. In a static or
quasistatic analysis, the transpose of this projector is applied to the (possibly variable)
right hand-side to make sure that the external
load is self-equilibrated and therefore admissible. In a dynamic analysis: a) this projector is
applied to the initial solution (initial displacement and velocity fields), and b)
at each time-step, the transpose of this projector is applied to the (time-dependent) right-hand side of the
equation being solved. In all cases, the net effect is to work with (and output) a solution
where the thermal zero energy modes have been filtered out.
The constructed projector can be written as  where I
is the identity matrix, Z is the matrix of the zero energy modes of
the thermal system (always computed with the HZEM method),
and Q is either the identity matrix for static analysis, or the capacity matrix for quasistatic and dynamic
analyses. Hence, in a quasistatic analysis, this command requires the specific heat to
be present in the material properties specified under the
where I
is the identity matrix, Z is the matrix of the zero energy modes of
the thermal system (always computed with the HZEM method),
and Q is either the identity matrix for static analysis, or the capacity matrix for quasistatic and dynamic
analyses. Hence, in a quasistatic analysis, this command requires the specific heat to
be present in the material properties specified under the MATERIAL command.
50 HELMHOLTZ
|
Command Statement: HELMHOLTZ
|
The command statement HELM can be used to specify an absorbing boundary condition, and/or a set of incident plane waves or point source terms associated
with spherical waves for a frequency-domain acoustic or elastoacoustic (Helmholtz) problem. Its input format is given below.
Note 1: For AERO-S, the time-harmonic form of the solution of a formulated Helmholtz problem is  , where
, where  denotes the scalar field of
interest — for example, the pressure perturbation —
denotes the scalar field of
interest — for example, the pressure perturbation —  is its amplitude, and
is its amplitude, and  denotes its circular frequency.
When the formulated Helmholtz problem includes an incident wave of amplitude
denotes its circular frequency.
When the formulated Helmholtz problem includes an incident wave of amplitude  (which can also be specified as a souce term), AERO-S solves this problem
for the scattered amplitude
(which can also be specified as a souce term), AERO-S solves this problem
for the scattered amplitude  .
.
Note 2: If an incident plane wave or a point source term is specified under this command (currently, only one or the other can be specified under
HELM), and other Dirichlet boundary conditions are also specified under HDIR, only the Dirichlet boundary condition  associated
with the amplitude of the incident wave or point source terms specified under
associated
with the amplitude of the incident wave or point source terms specified under HELM are applied to the formulated Helmholtz problem.
BGTL |
|

| Order (0, 1, or 2) of the generalized Bayliss-Gunburger-Turkel non reflecting condition to be
applied on the artificial boundary specified under the HARB command (integer).
|

| This real number (float) is to be used only when the artificial
boundary (see HARB)
is supposed to be either a sphere or an ellipsoid, and some geometric approximations generated by AERO-S are
to be overwritten by values that can in that case be evaluated exactly. Otherwise, should simply not be inputted.
For a sphere, the curvature of , which is otherwise automatically approximated by AERO-S is overwritten
by  . Similarly, for an ellipsoid of the form . Similarly, for an ellipsoid of the form  , ,  . .
|

| This real number (float) is to be used only when the artificial
boundary (see HARB) is
supposed to be an ellipsoid, and some geometric approximations generated by AERO-S are to be overwritten by values
that can in that case be evaluated exactly. Otherwise, should simply not be inputted.
For an ellipsoid of the form ,  . .
|
POINTSOURCE
| Keyword indicating that the Dirichlet and/or Neumann boundary conditions (see HDIR and HDNB) of the acoustic (Helmholtz) or elastoacoustic problem defined by this command are associated
with a time-harmonic spherical wave of the form  , where , where  , and propagated by a point source located at the point , and propagated by a point source located at the point  (character).
Multiple spherical waves and point sources can be specified under
this command leading to multiple acoustic or elastoacoustic analyses.
Hence, this line should be followed by a line specifying the
number of point sources and spherical waves,
(character).
Multiple spherical waves and point sources can be specified under
this command leading to multiple acoustic or elastoacoustic analyses.
Hence, this line should be followed by a line specifying the
number of point sources and spherical waves,  , and lines specifying for each wave its point source . When used to define Neumann boundary conditions (see HDNB), this option is
available only for the faces of type 10 and 11 (see HDNB). , and lines specifying for each wave its point source . When used to define Neumann boundary conditions (see HDNB), this option is
available only for the faces of type 10 and 11 (see HDNB).
|
|
| Number of point sources propagating spherical waves (integer).
|

| x coordinate of the location of a point source (float).
|

| y coordinate of the location of a point source (float).
|

| z coordinate of the location of a point source (float).
|
PLANEWAVE
| Keyword indicating that the Dirichlet and/or Neumann boundary conditions (see HDIR and HDNB) of the acoustic (Helmholtz) or elastoacoustic problem defined by this command are associated
with an incident time-harmonic plane wave of the form  (character). Multiple such waves can be specified under this command
leading to multiple acoustic or elastoacoustic analyses.
Hence, this line should be followed by a line specifying the
number of plane waves to be considered,
(character). Multiple such waves can be specified under this command
leading to multiple acoustic or elastoacoustic analyses.
Hence, this line should be followed by a line specifying the
number of plane waves to be considered,  , and lines specifying for each wave its direction of propagation , and lines specifying for each wave its direction of propagation  . .
|
|
| Number of incident planar waves (integer).
|

| Normalized x component of the direction of a planar wave (float).
|

| Normalized y component of the direction of a planar wave (float).
|

| Normalized z component of the direction of a planar wave (float).
|
51 HELMHOLTZ ANALYSIS (AXISYMMETRIC/PARTIALLY AXISYMMETRIC)
|
Command Statement: AXIHELMHOLTZ
|
The command statement AXIHELMHOLTZ can be used to:
- Activate the acoustic analysis in the frequency domain (Helmholtz) of an axisymmetric or partially axisymmetric scatterer.
- Specify the acoustic analysis parameters including the directions of the incident planar wave.
The computational technology underlying this command is that described in:
- U. Hetmaniuk and C. Farhat, "A Fictitious Domain Decomposition
Method for the Solution of Partially Axisymmetric Acoustic Scattering
Problems - Part II: Neumann Boundary Conditions,"
International Journal for Numerical Methods in Engineering,
Vol. 58, pp. 63-81 (2003)
- U. Hetmaniuk and C. Farhat, "A Finite Element-Based
Fictitious Domain Decomposition Method for the Fast Solution of
Partially Axisymmetric Sound-Hard Acoustic Scattering Problems,"
Finite Elements in Analysis and Design, Vol. 39, pp.
707-725 (2003)
- C. Farhat and U. Hetmaniuk, "A Fictitious Domain
Decomposition Method for the Solution of Partially Axisymmetric Acoustic
Scattering Problems – Part I: Dirichlet Boundary Conditions,"
International Journal for Numerical Methods in Engineering,
Vol. 54, pp. 1309-1332 (2002)
Note 1: This command should be used together with the following commands, as needed: AXIHARB, AXIHASFFP, AXIHCFNO, AXIHDIR, AXIHFFP, AXIHLMPC, AXIHNEUFD,
AXIHNEURD, AXIHNOBAS, AXIHWAN, and DECOMPOSE.
Note 2: This command is currently supported by the following two-dimensional, axisymmetric element types (see TOPOLOGY): type 59 (6-node triangle), type 60 (4-node quadrilateral),
type 61 (3-node triangle), and type 62 (8-node quadrilateral).
Note 3: This command is currently supported only by the FETI solver (see STATICS), with the following restrictions:
- For local and coarse solvers: only
sparse and skyline may be requested.
- For the interface equation solver: only
gcr and agmres may be requested.
- For the solution of multiple systems: acceleration is available
only for systems with multiple right sides arising from multiple planar
wave incident directions, using for
gcr the pair of
sub-command keyword and corresponding numerical value MAXORTH maxorth_v, and for agmres the pair of sub-command keyword and corresponding numerical value
DEFLATION_size deflation_size_v.
Note 4: In the case of a partially axisymmetric scatterer and Neumann (sound-hard) boundary conditions, the user must:
- Specify, in addition to the two-dimensional mesh associated with the
computational domain of the axisymmetric component of the scatterer,
a three-dimensional mesh discretizing the fictitious computational
domain associated with its non-axisymmetric component.
- Use the command AXIHNEUFD to specify the nodal Neumann (sound-hard) boundary conditions and the command AXIHCFNO to specify the set of constrained fictitious nodes.
- Use a special mesh decomposition where:
- In the header of the decomposition file, the number of subdomains is set to -(
NSUB_AXI + 1), where NSUB_AXI is the number of subdomains into which the
two-dimensional mesh associated with the computational domain of the axisymmetric component of the scatter is decomposed.
- All elements discretizing the fictitious domain are placed in the last subdomain.
Note 5: When one or more planar wave incident directions
is/are specified using this command, the directions specified using the
commands AXIHDIR, AXIHLMPC, and/or AXIHNEURD
are ignored.
The input format of this command is given below.
PLANEWAVE
| Sub-command keyword to specify one or more incident planar waves (characters).
|
| Number of incident planar waves (integer).
|
| Normalized component of the planar wave incident direction (real).
|
| Normalized component of the planar wave incident direction (real).
|
| Normalized component of the planar wave incident direction (real).
|
NMODES nmodes_v
| This pair of sub-command keyword
(characters) and corresponding numerical value (integer) specifies the
number of Fourier modes to be used in the expansion of the solution in
the
two-dimensional computational domain associated with the
axisymmetric component of the scatterer.
|
NTSLICES ntslices_v
| This pair of sub-command keyword
(characters) and corresponding numerical value (integer) is relevant
only for postprocessing the three-dimensional solution. It specifies the
number of angular
(  ) slices ( ) slices (  ) of the overall computational domain where to postprocess the
solution at the locations obtained by rotating the two-dimensional mesh
associated
with the axisymmetric component of the scatterer (integer).
) of the overall computational domain where to postprocess the
solution at the locations obtained by rotating the two-dimensional mesh
associated
with the axisymmetric component of the scatterer (integer).
|
52 HELMHOLTZ ARTIFICIAL ABSORBING BOUNDARY CONDITIONS *S*
The HARB command statement is used to specify the artificial boundary on which
the absorbing condition specified in the HELMHOLTZ command (see HELMHOLTZ) is to be applied.
The input format is given below.
Note 1: In frequency-domain computations, the absorbing condition
is applied in general to the solution variable. Because it does not
make sense to absorb the
incident field, AERO-S works in this case with the scattered field as the solution variable.
Note 2: The BGTL (Bayliss-Gunzberger-Turkel-Like) absorbing boundary condition (see HELMHOLTZ) of order 0 can be applied to any face type described below.
The BGTL of order 1 or 2 can be applied only to the face types 1, 2, 3, and 6 described below.
Note 3: When using a BGTL absorbing boundary condition, the face types chosen for constructing the artificial boundary must be compatible with
the faces of the Helmholtz elements (see TOPOLOGY) they overlay (see summary table given below).
| FACE_TYPE | Problem Dimension | BGTL Order | ELEMENT_TYPE
|
|---|
| 1 | 2D | 0,1,2 | 30,31,33,34,35,36
|
| 2 | 2D | 0,1,2 | 32,38
|
| 3 | 3D | 0,1,2 | 40,41
|
| 4 | 3D | 0 | 44,45
|
| 6 | 3D | 0,1,2 | 42
|
| 10 | 3D | 0 | 95
|
| 11 | 3D | 0 | 96
|
| 12 | 2D | 0 | 98
|
| 13 | 2D | 0 | 99
|
FACE# FACETYPE CONNECTIVITY_NODES
|
FACE#
| Face (or edge in two dimensions)
id number whose type and connectivity are to be specified (integer). In
practice, this id number is ignored by AERO-S.
|
FACE_TYPE |
|
| 1
| 2-node line segment. To be used with two-dimensional linear elements.
|
| 2
| 3-node line segment. To be used with two-dimensional quadratic elements.
|
| 3
| 3-node triangular face. To be used with three-dimensional linear tetrahedral element.
|
| 4
| 4-node quad face. To be used with three-dimensional linear hexahedral element.
|
| 6
| 6-node triangular face. To be used with three-dimensional quadratic tetrahedral element.
|
| 10
| 4, 9, 16 or 25-node quadrilaterial face. To be used with three-dimensional full isoparametric hexahedral elements.
|
| 11
| 3, 6, 10 or 15-node triangular face. To be used with three-dimensional full isoparametric tetrahedral elements.
|
| 12
| 2, 3, 4 or 5-node line segment. To be used with two-dimensional full isoparametric quadrilateral elements.
|
| 13
| 2, 3 or 4-node line segment. To be used with two-dimensional full isoparametric triangular elements.
|
CONNECTIVITY_NODES
| These should be listed in a stacked fashion on a single line, and numbered
clockwise (when looking from outside in three dimensions).
|
53 HELMHOLTZ ARTIFICIAL ABSORBING BOUNDARY CONDITIONS (AXISYMMETRIC/PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHARB
|
The command AXIHARB is relevant only to the
frequency-domain acoustic (Helmholtz) analysis of an axisymmetric or
partially axisymmetric scatterer (see AXIHELMHOLTZ),
where
it can be used to specify an axisymmetric BGTL
(Bayliss-Gunzberger-Turkel-Like) absorbing boundary condition on the
chosen artificial boundary of the two-dimensional mesh associated with
the
axisymmetric component of the scatterer. Its input format is given
below.
BGTL | |
| SURFR | SURFZ |
| NODE1# | NODE2# | [NODE3#]
| | ... | |
| | ... | |
| NODE1# | NODE2# | [NODE3#]
|
|
BGTL
| Specifies the order (0, 1, or 2)
of the generalized Bayliss-Gunzburger-Turkel non reflecting condition
as well as the shape of the artificial boundary on which this
condition is applied (integer). Note that the shape of must be consistent with that implied by the list of nodes inputted below. The following values of this parameter
are supported:
0: basic Sommerfeld condition.
-1: first-order BGTL condition applied on an artificial boundary
corresponding to the projection on the
two-dimensional mesh associated with the axisymmetric component of the
scatterer of a cylinder of revolution parameterized in three parts by:
-
 = =  SURFR  , ,  SURFR ,  SURFR
-
 = =  SURFZ , SURFZ  SURFZ , SURFZ
On the two-dimensional mesh, a corner of is replaced by a circle and the two edges connecting at a corner are assumed to have the same size.
1: first-order BGTL condition applied on an artificial boundary
corresponding to the projection on the
two-dimensional mesh associated with the axisymmetric component of the
scatterer of an ellipsoid of revolution parameterized by:
-
 SURFR  , ( , (SURFR  ) )
-
 - -SURFZ  , ( , (SURFZ )
-2: second-order BGTL condition applied on an artificial boundary
corresponding to the projection on the
two-dimensional mesh associated with the axisymmetric component of the
scatterer of a cylinder of revolution parameterized in three parts by:
- =
SURFR , SURFR , SURFR
- =
SURFZ , SURFZ SURFZ , SURFZ
On the two-dimensional mesh, a corner of is replaced by a circle and the two edges connecting at a corner are assumed to have the same size.
2: second-order BGTL condition applied on an artificial boundary corresponding to the projection on the two-dimensional mesh associated with the axisymmetric component
of the scatterer of an ellipsoid of revolution parameterized by:
-
SURFR , (SURFR )
- -
SURFZ , (SURFZ )
|
SURFR
| Real-valued coefficient contributing to the parameterization of the artificial boundary (real). See above.
|
SURFZ
| Real-valued coefficient contributing to the parameterization of the artificial boundar y (real). See above.
|
NODE1#
| ID number of the first node of a
line element of the two-dimensional mesh associated with the
axisymmetric component of the scatterer, contributing to the geometrical
definition of the
artificial boundary (integer).
|
NODE2#
| ID number of the second node of
the same line element of the two-dimensional mesh associated with the
axisymmetric component of the scatterer, contributing to the geometrical
definition of the
artificial boundary (integer).
|
NODE3#
| ID number of the optional third
node of the same line element of the two-dimensional mesh associated
with the axisymmetric component of the scatterer, contributing to the
geometrical
definition of the artificial boundary (integer).
|
54 HELMHOLTZ AUXILIARY SURFACE FAR-FIELD PATTERN (AXISYMMETRIC/PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHASFFP
|
The command AXIHASFFP is relevant only to the
frequency-domain acoustic (Helmholtz) analysis of an axisymmetric or
partially axisymmetric scatterer (see AXIHELMHOLTZ).
It can be used to describe, using line elements that are edges of the
two-dimensional mesh associated with the axisymmetric component of the
scatterer,
a closed auxiliary surface that can be used to compute the far-field pattern of the solution: this makes this command (and the related
command AXIHNOBAS) necessary for computing (correctly) the far-field pattern (see AXIHFFP). The closed auxiliary surface should not intersect any component of the scatterer.
Note 1: Currently, the description by line elements of the closed
auxiliary surface must refer to nodes of the two-dimensional mesh
associated with the axisymmetric component of the scatterer
defined in NODES.
The input format of this command is given below.
LINE_ELEMENT# | LINE_ELEMENT_TYPE | SC | CONNECTIVITY_NODES
| | ... | | |
| | ... | | |
| LINE_ELEMENT# | LINE_ELEMENT_TYPE | SC | CONNECTIVITY_NODES
|
|
LINE_ELEMENT#
| ID number of a line element
corresponding to an edge of the two-dimensional mesh and contributing to
the description of the auxiliary surface defined above (integer). The
type and
connectivity of this edge should be specified as described below
(integer). Currently, this parameter is ignored by AERO-S.
|
LINE_ELEMENT_TYPE
| Line element type (integer).
|
| 11
| 2-node line segment, to be used with two-dimensional axisymmetric linear elements.
|
| 12
| 3-node line segment, to be used with two-dimensional axisymmetric quadratic elements.
|
SC
| Sommerfeld constant (real). Currently this value is ignored by AERO-S.
|
CONNECTIVITY_NODES
| List of node ID numbers describing the connectivity of a line segment (integers).
|
55 HELMHOLTZ CONSTRAINED FICTITIOUS NODES (PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHCFNO
|
The command AXIHCFNO is relevant only to the frequency-domain acoustic (Helmholtz) analysis of a partially axisymmetric scatterer (see AXIHELMHOLTZ)
with Neumann (sound-hard)
boundary conditions. It can be used to identify the list of nodes in the
fictitious domain located on the intersection between the axisymmetric
and non-axisymmetric surfaces of the scatterer,
where AXIHNEUFD can then compute the appropriate source term. Its input format is given below.
NODE#
| ID number of a node of the
three-dimensional mesh located on the intersection between the
axisymmetric and non-axisymmetric surfaces of the scatterer (integer).
|
56 HELMHOLTZ DIRICHLET BOUNDARY CONDITIONS *S*
The HDIR command statement is used to specify nodal Dirichlet boundary conditions
for a frequency-domain acoustic scattering (Helmholtz) problem. The input format is given below.
Note 1: When the keyword PLANEWAVE or POINTSOURCE is specified under HELMHOLTZ, it overwrites the REAL_PART_VALUE
and IMAGINARY_PART_VALUE (see below) by , where is the amplitude of an incident time-harmonic plane wave specified by PLANEWAVE, or
an that of an incident time-harmonic spherical wave propagating from a source located at a point specified by POINTSOURCE.
NODE# DOF# REAL_PART_VALUE IMAGINARY_PART_VALUE
|
NODE#
| Node number where the Dirichlet boundary condition is specified (integer).
|
DOF#
| Degree of freedom local number where the boundary condition is specified (integer). This number should be set to 8.
|
REAL_PART_VALUE
| Real part of the value of the specified boundary condition (float).
|
IMAGINARY_PART_VALUE
| Imaginary part of the value of the specified boundary condition (float).
|
57 HELMHOLTZ DIRICHLET BOUNDARY CONDITIONS (AXISYMMETRIC/PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHDIR
|
The command AXIHDIR is relevant only to the
frequency-domain acoustic (Helmholtz) analysis of an axisymmetric or
partially axisymmetric scatterer (see AXIHELMHOLTZ).
It can be used to specify nodal Dirichlet (sound-soft) boundary
conditions on the two-dimensional mesh associated with the axisymmetric
component of the scatter of the form  , where
, where
 is the scattered wave,
is the scattered wave,  is the amplitude of the incident time-harmonic planar wave specified in AXIHELMHOLTZ or below (see also HELMHOLTZ),
is the pure imaginary number satisfying
is the amplitude of the incident time-harmonic planar wave specified in AXIHELMHOLTZ or below (see also HELMHOLTZ),
is the pure imaginary number satisfying  , is the wavenumber specified in AXIHWAN,
, is the wavenumber specified in AXIHWAN,  is the vector position of a point in space,
is the vector position of a point in space,
 is the normalized direction of the incident planar wave, and is in general a complex-valued constant.
is the normalized direction of the incident planar wave, and is in general a complex-valued constant.
Note 1: When a planar wave incident direction is specified in AXIHELMHOLTZ, the direction specified in this command is ignored.
Note 2: In this context, the classical Dirichlet (sound-soft) boundary condition corresponds to  .
.
The input format of this command is given below.
CR
| Real part of the constant of the Dirichlet (sound-soft) boundary condition  (real). (real).
|
CI
| Imaginary part of the constant of the Dirichlet (sound-soft) boundary condition (real).
|
| Normalized component of the planar wave incident direction (real).
|
| Normalized component of the planar wave incident direction (real).
|
| Normalized component of the planar wave incident direction (real).
|
NODE#
| ID number of a node of the
two-dimensional mesh where the nodal Dirichlet (sound-soft) boundary
condition is specified (integer).
|
58 HELMHOLTZ DISTRIBUTED NEUMANN BOUNDARY CONDITION *S*
The HDNB command statement can be used to specify on all or segments of the surface of a scatterer
a distributed Neumann boundary condition of the form  ,
where the superscripts
,
where the superscripts  and designate scattered and incident quantities, respectively. The incident time-harmonic wave
can be a time-harmonic plane wave specified by
and designate scattered and incident quantities, respectively. The incident time-harmonic wave
can be a time-harmonic plane wave specified by PLANEWAVE, or a time-harmonic spherical wave propagating from a source located at a point
specified by POINTSOURCE in HELMHOLTZ. Note that for problems involving a nonhomogenous fluid, HDNB can only be used to define a surface that is submerged
entirely in one and only one fluid.
The input format of this command is given below.
FACE# FACE_TYPE CONNECTIVITY_NODES
|
FACE#
| Face (or edge in two dimensions)
id number whose type and connectivity are to be specified (integer). In
practice, this id number is ignored by FEM.
|
FACE_TYPE |
|
| 1
| 2-node line segment. To be used with two-dimensional linear elements.
|
| 2
| 3-node line segment. To be used with two-dimensional quadratic elements.
|
| 3
| 3-node triangular face. To be used with three-dimensional linear tetrahedral elements.
|
| 4
| 4-node quad face. To be used with three-dimensional linear hexahedral elements.
|
| 6
| 6-node triangular face. To be used with three-dimensional quadratic tetrahedral elements.
|
| 10
| 4, 9, 16 or 25-node quadrilaterial face. To be used with three-dimensional full isoparametric hexahedral elements.
|
| 11
| 3, 6, 10 or 15-node triangular face. To be used with three-dimensional full isoparametric tetrahedral elements.
|
| 12
| 2, 3, 4 or 5-node line segment. To be used with two-dimensional full isoparametric quadrilateral elements.
|
| 13
| 2, 3 or 4-node line segment. To be used with two-dimensional full isoparametric triangular elements.
|
CONNECTIVITY_NODES
| These should be listed in a stacked fashion on a single line, and numbered
counter clockwise (when looking from infinity in three dimensions).
|
59 HELMHOLTZ FAR-FIELD PATTERN (AXISYMMETRIC/PARTIALLY AXISYMMETRIC) *S*
Command Statement: AXIHFPP INCREMENT
|
The command AXIHFFP is relevant only to the
frequency-domain acoustic (Helmholtz) analysis of an axisymmetric or
partially axisymmetric scatterer (see AXIHELMHOLTZ),
where
it can be used to activate the outputting to a file of the far-field
pattern of the acoustic pressure field. However: this field is computed
only if the user also specifies
in the AERO-S ASCII Input Command Data file the command AXIHASFFP; and it is correctly computed only if the user also specifies in the aforementioned file
the command AXIHNOBAS.
The output file will have the prefix specified in OUTPUT for the result GHELMHOL and the extension ".ffp". It will contain on each line four
values " , , real-part(ffp), imaginary-part(ffp)".
The first two quantities are the spherical angles (expressed in radians) that determine the direction  .
The number of output lines depends on the parameter
.
The number of output lines depends on the parameter INCREMENT (see below).
The input format of this command is given below.
INCREMENT
| Specifies the number of longitudinal directions where to evaluate the far-field pattern: (INCREMENT/2)+1) latitudinal directions are also considered and
therefore the far-field pattern is evaluated at ((INCREMENT/2)+1))*INCREMENT points uniformly distributed in spherical coordinates.
|
60 HELMHOLTZ LINEAR MULTIPOINT CONSTRAINTS
The HLMPC command statement is used to specify a set of complex linear multipoint constraint
equations of the form
in a frequency-domain acoustic model.
There is no limitation on the number of multipoint constraints, or number of degrees of freedom
related by the same constraint equation.
The format of this command statement is as follows.
Note 1: The Lagrange multiplier method for enforcing the
constraints associated with this command is supported only by the
FETI-DP family of solvers, the GMRES solver, and the SPOOLES and MUMPS
direct sparse solvers (see STATICS).
CONSTRAINT# | RHS | CONSTRAINT_METHOD
| NODE# | DOF# | REAL-PART-COEFF | IMAGINARY-PART-COEFF
| | . | | |
| | . | | |
| NODE# | DOF# | REAL-PART-COEFF | IMAGINARY-PART-COEFF
|
|
CONSTRAINT#
| This corresponds to the constraint equation number i (integer).
|
RHS
| This is the right-hand side  of the i-th
constraint equation (float). It can have both a real and an imaginary
part, in which case the real part is specified first and followed by the
imaginary part. of the i-th
constraint equation (float). It can have both a real and an imaginary
part, in which case the real part is specified first and followed by the
imaginary part.
|
CONSTRAINT_METHOD
| This is the method for enforcing the constraint (characters). The default method is set in CONSTRAINTS and used whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
elimination
| The elimination method.
|
penalty [beta]
| The penalty method. The parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
NODE#
| This is the number of the node contributing the coefficient  of the
i-th constraint equation (integer). of the
i-th constraint equation (integer).
|
DOF#
| This is the local number of the degree of freedom at the node specified above
contributing the coefficient of the i-th constraint equation (integer).
|
REAL_PART_VALUE
| This is the real part of the coefficient of the i-th constraint equation (float).
|
IMAGINARY_PART_VALUE
| This is the imaginary part of the coefficient of the i-th constraint equation (float).
|
61 HELMHOLTZ LINEAR MULTIPOINT CONSTRAINTS (PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHLMPC
|
The command AXIHLMPC is relevant only to the frequency-domain acoustic (Helmholtz) analysis of a partially axisymmetric scatterer (see AXIHELMHOLTZ).
It specifies the (weak) enforcing of a set of complex-valued linear multipoint constraint equations corresponding to:
- (see AXIHDIR)
at the "rotated" nodes of the two-dimensional mesh associated with the
axisymmetric component of the scatterer that lie on the external
surface of the non-axisymmetric component, when the analysis is
performed with Dirichlet (sound-soft) boundary conditions.
- The continuity of the solution across the interface between the
three-dimensional mesh associated with the non-axisymmetric component
of the scatterer and the "rotated" nodes of the two-dimensional
mesh associated with its axisymmetric component, when the analysis is
performed with Neumann (sound-hard) boundary conditions.
Currently, the axisymmetric and non-axisymmetric components of the
scatterer are assumed to have matching discrete interfaces, which
simplifies the expression, input, and processing of these constraints.
Note 1: When a planar wave incident direction is specified in AXIHELMHOLTZ, the direction specified in this command is ignored.
Note 2: In this context, the classical Dirichlet (sound-soft) boundary condition corresponds to .
The input format of this command is given below.
CR
| The setting of this real-valued parameter (real) depends on the boundary conditions of the analysis:
- In the case of Dirichlet (sound-soft) boundary conditions,
CR is the real part of the constant in the boundary condition .
- In the case of Neumann (sound-hard) boundary conditions,
CR should be set to .
|
CI
| The setting of this real-valued parameter (real) depends on the boundary conditions of the analysis:
- In the case of Dirichlet (sound-soft) boundary conditions,
CI is the imaginary part of the constant in the boundary condition (real).
- In the case of Neumann (sound-hard) boundary conditions,
CI should be set to .
|
| Normalized component of the planar wave incident direction (real).
|
| Normalized component of the planar wave incident direction (real).
|
| Normalized component of the planar wave incident direction (real).
|
NODE#
| ID number of a node of the
two-dimensional mesh associated with the axisymmetric component of the
scatterer, where any of the constraints outlined above is to be enforced
(integer).
|
ANGLE1
| Lower bound  of the angular interval of the angular interval  in which the two-dimensional mesh associated with the axisymmetric
component of the scatterer has to be rotated to
match the three-dimensional mesh associated with the
non-axisymmetric component of the scatterer at the interface between
both components (real).
in which the two-dimensional mesh associated with the axisymmetric
component of the scatterer has to be rotated to
match the three-dimensional mesh associated with the
non-axisymmetric component of the scatterer at the interface between
both components (real).
|
ANGLE2
| Upper bound  of the angular interval
in which the two-dimensional mesh associated with the axisymmetric
component of the scatterer has to be rotated to
match the three-dimensional mesh associated with the
non-axisymmetric component of the scatterer at the interface between
both components (real). of the angular interval
in which the two-dimensional mesh associated with the axisymmetric
component of the scatterer has to be rotated to
match the three-dimensional mesh associated with the
non-axisymmetric component of the scatterer at the interface between
both components (real).
|
NWEDGES
| Number of uniform wedges in the interval (integer) that:
- In the case of Dirichlet (sound-soft) boundary conditons,
generate the locations of the rotated nodes of the two-dimensional mesh
associated with the axisymmetric component of the
scatterer, where to apply the linear multipoint constraints.
- In the case of Neumann (sound-hard) boundary conditions,
recover the locations of the nodes of the three-dimensional mesh
associated with the non-axisymmetric component of the
scatterer.
|
62 HELMHOLTZ LOCATIONS WHERE TO COMPUTE THE KIRCHHOFF INTEGRAL
|
Command Statement: KIRLOC
|
When KIRCHHOFF is selected as an OUTPUT result and the surface of the scatterer is defined using the command HSCB,
this command should be used to
specify the locations of the points where the (far-field) solution of a
frequency-domain acoustic or elastoacoustic (Helmholtz) problem
is to be evaluated using the Kirchhoff integral and outputted. These
points do not need to be nodes of the mesh. Usually, but not
necessarily,
they are outside the computational domain, in the far-field. The keyword
KIRLOC should be followed by as many lines as there
are points where it is desired to evaluate the solution of the aforementioned Helmholtz problem.
Each line contains the coordinates of such a point.
The syntax of this command is given below.
X-ORDINATE Y-ORDINATE Z-ORDINATE
|
X-ORDINATE
|
X-ordinate of a point where to evaluate the solution of
the Helmholtz problem to be solved using the Kirchhoff integral (real).
|
Y-ORDINATE
|
Y-ordinate of a point where to evaluate the solution of
the Helmholtz problem to be solved using the Kirchhoff integral (real).
|
Z-ORDINATE
|
Z-ordinate of a point where to evaluate the solution of
the Helmholtz problem to be solved using the Kirchhoff integral (real).
|
63 HELMHOLTZ NEUMANN BOUNDARY CONDITIONS *S*
Command Statement: HNEU [LOADSET_ID]
|
The HNEU command statement is used to specify the nodal Neumann
boundary conditions for a frequency-domain acoustic scattering (Helmholtz)
problem. The input format is given below.
NODE# REAL_PART_VALUE IMAGINARY_PART_VALUE
|
LOADSET_ID
| Optional non-negative integer
which identifies explicitly the "load" set to which the source term
generated by this command belongs to (integer).
The default value is 0. Hence, the HNEU command can be repeated as many times as desired within the same input file using
each time a different value for LOADSET_ID and different data. The LOADCASE command can refer to LOADSET_ID to define one or multiple "load" cases
for static analysis (see the STATICS command and the explanation of its sub-command keyword CASES), and/or the "load" case for dynamic analysis.
|
NODE#
| Node number where the Neumann boundary condition is specified (integer).
|
REAL_PART_VALUE
| Real part of the value of the specified boundary condition (float).
|
IMAGINARY_PART_VALUE
| Imaginary part of the value of the specified boundary condition (float).
|
64 HELMHOLTZ NEUMANN BOUNDARY CONDITIONS – FICTITIOUS DOMAIN (PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHNEUFD
|
The command AXIHNEUFD is only relevant to the frequency-domain acoustic (Helmholtz) analysis of a partially axisymmetric scatterer (see AXIHELMHOLTZ)
with Neumann (sound-hard)
boundary conditions. It can be used to activate the computation of the
source term acting on the external surfaces of the non-axisymmetric
component of the scatterer and that acting on the
intersection between its axisymmetric and non-axisymmetric surfaces. Its
input format is given below.
ELEMENT_TYPE | INT | NYSLICES | Y1 | Y2 | CONNECTIVITY_NODES
|
|
EL_TYPE
| Line element or surface element type (integer).
|
| 4
| 4-node quadrilateral element, to
be used with three-dimensional linear hexahedral elements, to compute
the source term acting on the intersection between the axisymmetric and
non-axisymmetric
surfaces of the scatterer.
|
| 8
| 8-node quadrilateral, to be used
with three-dimensional quadratic hexahedral elements, to compute the
source term acting on the intersection between the axisymmetric and
non-axisymmetric
surfaces of the scatterer.
|
| 11
| 2-node line segment, to be used
with two-dimensional axisymmetric linear elements, to compute the source
term acting on the external surfaces of the non-axisymmetric component
of the scatterer.
|
| 12
| 3-node line segment, to be used
with two-dimensional axisymmetric quadratic elements, to compute the
source term acting on the external surfaces of the non-axisymmetric
component of the
scatterer.
|
| 14
| 4-node quadrilateral, to be used
with three-dimensional linear hexahedral elements, to compute the
source term acting on the external surfaces of the non-axisymmetric
component of the
scatterer.
|
| 18
| 8-node quadrilateral, to be used
with three-dimensional quadratic hexahedral elements, to compute the
source term acting on the external surfaces of the non-axisymmetric
component of the
scatterer.
|
INT
| Integer number that must be set as follows:
|
-1
| for EL_TYPE = 4 and 8.
|
0
| for eL_TYPE = 11, 12, 14, and 18.
|
NYSLICES
| Number of slices in the
(vertical) direction, to compute the source term acting on the
external surfaces of the non-axisymmetric component of the scatterer, or
that acting on the
intersection between its axisymmetric and non-axisymmetric
surfaces (integer).
|
Y1
| Lower bound  (real) of the interval (real) of the interval  (see (see NYSLICES above).
|
Y2
| Upper bound  (real) of the interval (see (real) of the interval (see NYSLICES above).
|
CONNECTIVITY_NODES
| List of node ID numbers describing the connectivity of the line or surface element (integers).
|
65 HELMHOLTZ NEUMANN BOUNDARY CONDITIONS – REAL DOMAIN (AXISYMMETRIC/PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHNEURD
|
The command AXIHNEURD is relevant only to the
frequency-domain acoustic (Helmholtz) analysis of an axisymmetric or
partially axisymmetric scatterer (see AXIHELMHOLTZ).
It can be used to specify, in the real part of the computational domain, nodal boundary conditions corresponding to the Neumann (sound-hard) boundary condition of the form
 , where the superscripts and designate scattered and incident waves, respectively, denotes the normalized outward normal to the
surface of the scatterer, is the amplitude of the incident time-harmonic planar wave specified in AXIHELMHOLTZ or below (see also HELMHOLTZ),
is the pure imaginary number satisfying , is the wavenumber specified in AXIHWAN, is the vector position of a point in space,
is the normalized direction of the incident planar wave, and is in general a complex-valued constant.
, where the superscripts and designate scattered and incident waves, respectively, denotes the normalized outward normal to the
surface of the scatterer, is the amplitude of the incident time-harmonic planar wave specified in AXIHELMHOLTZ or below (see also HELMHOLTZ),
is the pure imaginary number satisfying , is the wavenumber specified in AXIHWAN, is the vector position of a point in space,
is the normalized direction of the incident planar wave, and is in general a complex-valued constant.
Note 1: When a planar wave incident direction is specified in AXIHELMHOLTZ, the direction specified in this command is ignored.
Note 2: In this context, the classical Dirichlet (sound-soft) boundary condition corresponds to .
The input format of this command is given below.
CR
| Real part of the constant of the specified Neumann (sound-hard) boundary condition associated with (real).
|
CI
| Imaginary part of the constant of the specified Neumann (sound-hard) boundary condition associated with (real).
|
| Normalized component of the planar wave incident direction (real).
|
| Normalized component of the planar wave incident direction (real).
|
| Normalized component of the planar wave incident direction (real).
|
NODE1#
| ID number of the first node of
an element of the two-dimensional mesh associated with the axisymmetric
component of the scatterer where the Neumann (sound-hard) boundary
condition is
specified (integer).
|
NODE2#
| ID number of the second node of
an element of the two-dimensional mesh associated with the axisymmetric
component of the scatterer where the Neumann (sound-hard) boundary
condition is
specified (integer).
|
NODE3#
| ID number of the optional third
node of an element of the two-dimensional mesh associated with the
axisymmetric component of the scatterer where the Neumann (sound-hard)
boundary condition is
specified (integer).
|
66 HELMHOLTZ NODES BELOW AUXILIARY SURFACE (AXISYMMETRIC/PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHNOBAS
|
The command AXIHNOBAS is relevant only to the
frequency-domain acoustic (Helmholtz) analysis of an axisymmetric or
partially axisymmetric scatterer (see AXIHELMHOLTZ).
It can be used to list all nodes of the two-dimensional mesh associated
with the axisymmetric component of the scatterer that are enclosed by
the auxiliary surface
defined in AXIHASFFP for the purpose of
computing the far-field pattern of the solution, so that these nodes can
be skipped during the computation of the far-field pattern.
Hence, this command is necessary for correctly computing the far-field
pattern (see AXIHFFP).
The input format of this command is given below.
NODE#
| ID number of a node of the
two-dimensional mesh associated with the axisymmetric component of the
scatterer that is enclosed by the auxiliary surface defined in AXIHASFFP (integer).
|
67 HELMHOLTZ SCATTERER BOUNDARY *S*
The HSCB command statement is used to specify the
surface of a scatterer. It is used to compute the farfield pattern of a
frequency-domain acoustic
solution, and therefore is necessary for the output of that farfield
pattern
(see OUTPUT).
The input format of this command is given below.
FACE# FACE_TYPE CONNECTIVITY_NODES
|
FACE#
| Face (or edge in two dimensions)
id number whose type and connectivity are to be specified (integer). In
practice, this id number is ignored by FEM.
|
FACE_TYPE |
|
| 1
| 2-node line segment. To be used with two-dimensional linear elements.
|
| 2
| 3-node line segment. To be used with two-dimensional quadratic elements.
|
| 3
| 3-node triangular face. To be used with three-dimensional linear tetrahedral elements.
|
| 4
| 4-node quad face. To be used with three-dimensional linear hexahedral elements.
|
| 6
| 6-node triangular face. To be used with three-dimensional quadratic tetrahedral elements.
|
| 10
| 4, 9, 16 or 25-node quadrilaterial face. To be used with three-dimensional full isoparametric hexahedral elements.
|
| 11
| 3, 6, 10 or 15-node triangular. To be used with three-dimensional full isoparametric tetrahedral elements.
|
| 12
| 2, 3, 4 or 5-node line segment. To be used with two-dimensional full isoparametric quadrilateral elements.
|
| 13
| 2, 3 or 4-node line segment. To be used with two-dimensional full isoparametric triangular elements.
|
CONNECTIVITY_NODES
| These should be listed in a stacked fashion on a single line, and numbered
counter clockwise (when looking from outside in three dimensions).
|
68 HELMHOLTZ WAVE NUMBER (AXISYMMETRIC/PARTIALLY AXISYMMETRIC) *S*
|
Command Statement: AXIHWAN
|
The command AXIHWAN is relevant only to the
frequency-domain acoustic (Helmholtz) analysis of an axisymmetric or
partially axisymmetric scatterer (see AXIHELMHOLTZ), where
it can be used to specify the wavenumber for such an analysis. Its input format is given below.
KAPPA
| Wavenumber at which the frequency-domain acoustic analysis is to be performed (real).
|
69 HELMHOLTZ WET INTERFACE BOUNDARY *S*
The HWIB command satement can be used to describe
the wet interface boundary of the structure in a coupled frequency
response elastoacoutic (fluid-structure) problem
where a single mesh is used to discretize both of the computional
acoustic fluid and structural domains. Its input format is given below.
Note 1: This command uses the same input format as HARB and HDNB but is supported only for face types 10, 11, 12 and 13.
Note 2: In this case, the capabilities of the ACME library are not used to generate the fluid-structure coupling coefficients.
FACE# FACETYPE CONNECTIVITY_NODES
|
FACE#
| Face (or edge in two dimensions)
id number whose type and connectivity are to be specified (integer). In
practice, this id number is ignored by FEM.
|
FACETYPE |
|
| 10
| 4, 9, 16 or 25-node
quadrilaterial face (to be used appropriately with three-dimensional
full isoparametric hexahedral elements).
|
| 11
| 3, 6, 10 or 15-node triangular (to be used appropriately with three-dimensional full isoparametric tetrahedral elements).
|
| 12
| 2, 3, 4 or 5-node line segment (to be used appropriately with two-dimensional full isoparametric quadrilateral elements).
|
| 13
| 2, 3 or 4-node line segment (to be used appropriately with two-dimensional full isoparametric triangular elements).
|
CONNECTIVITY_NODES
| These should be listed in a stacked fashion on a single line, and numbered as shown in the following examples:
|
| | 9-noded quad:
|
| | 7 8 9
|
| | 4 5 6
|
| | 1 2 3
|
| | 6-noded triangle:
|
| | 6
|
| | 4 5
|
| | 1 2 3
|
| | etc.
|
70 HYDROELASTIC FLUID/STRUCTURE BOUNDARY
The HEFSB command is used to specify the fluid-structure interface
boundary in a hydroelastic eigenvalue problem. The underlying discrete model
assumes that each node on this interface is shared by fluid and structural elements.
The input format of this command is given below.
Note 1: AERO-S automatically determines that a hydroelastic eigenvalue
problem is to be solved once it finds in the input file the HEFSB command,
or the HEFRS command which specifies its free-surface boundary.
This problem is solved using the added mass approach. The computed frequencies and structural mode shapes
can be output as in a regular structural eigen computation.
FACE# FACE_TYPE CONNECTIVITY_NODES
|
FACE#
| Face (or edge in two dimensions) identification number whose type and connectivity are to be specified (integer).
|
FACE_TYPE |
|
| 1
| 2-node line segment (to be used appropriately with two-dimensional linear elements).
|
| 2
| 3-node line segment (to be used appropriately with two-dimensional quadratic elements).
|
| 3
| 3-node triangular face (to be used appropriately with three-dimensional linear tetrahedral and prismatic elements).
|
| 4
| 4-node quadrilateral face (to be used appropriately with three-dimensional linear hexahedral and prismatic elements).
|
| 6
| 6-node triangular face (to be used appropriately with three-dimensional quadratic tetrahedral elements).
|
| 10
| Quadrilateral face (to be used appropriately with higher-order iso-parametric hexahedral elements).
|
| 11
| Triangular face (to be used appropriately with higher-order iso-parametric tetrahedral elements).
|
| 12
| Line segment (to be used appropriately with higher-order iso-parametric quadrilateral elements).
|
| 13
| Line segment (to be used appropriately with higher-order iso-parametric triangular elements).
|
CONNECTIVITY_NODES
| These should be listed in a stacked
fashion on a single line. The nodes of low-order faces should be ordered
counter-clockwise (when looking
from infinity in three dimensions). Those of higher-order faces (type
10–13) should be ordered from left to right and bottom to top
using any convenient axis system (when viewed from infinity in three
dimensions).
|
71 HYDROELASTIC FREE SURFACE BOUNDARY
The HEFRS command can be used to specify the free surface
boundary either in a hydroelastic eigenvalue problem, or in an acoustic or elastoacoustic (fluid-structure interaction)
problem where the fluid is assumed to be weightless.
At each node located on this free surface, AERO-S automatically
applies a zero
Dirichlet boundary condition for the fluid potential equation in the
first case, and for the scattered pressure
in the second case. For this reason, this command can be also used to
apply these specific Dirichlet boundary conditions wherever
desired in the fluid mesh.
The input format of this command is given below.
Note 1: AERO-S automatically determines that a hydroelastic eigenvalue
problem is to be solved once it finds in the input file the HEFRS command, or the HEFSB command
which specifies its hydroelastic fluid/structure interface boundary. This problem is solved
using the added mass approach. The computed frequencies and structural mode shapes can be output as in a regular
structural eigen computation.
FACE# FACE_TYPE CONNECTIVITY_NODES
|
FACE#
| Face (or edge in two dimensions) identification number whose type and connectivity are to be specified (integer).
|
FACE_TYPE
| Currently, this entry is ignored by AERO-S. Still, it must be assigned a dummy integer value (integer).
|
CONNECTIVITY_NODES
| These should be listed in a stacked fashion on a single line.
|
72 HYPER REDUCTION OF THE INERTIA FORCES ASSOCIATED WITH A CONSTANT MASS MATRIX
|
Command Statement: WEIGHTMASS
|
The command WEIGHTMASS can be used to request during an online computation the hyper reduction
of the inertia forces associated with a constant mass matrix using an inputted reduced mesh and associated
weights, computed using the command RMSHC and the hyper reduction method ECSW.
73 IMPEDANCE ANALYSIS
|
Command Statement: IMPEDANCE [SWEEP_ID]
|
The IMPEDANCE command can be used for two different purposes:
- Signal that the problem to be solved is a forced frequency response vibro-acoustic (aka elastoacoustic and fluid-structure),
structural dynamic, or acoustic problem possibly formulated in an or
 parameter domain and of the form
parameter domain and of the form
 or more specifically,
or more specifically,
 and specify a fast solution algorithm for this problem. In the above block matrix equation, is the pure imaginary number satisfying
and specify a fast solution algorithm for this problem. In the above block matrix equation, is the pure imaginary number satisfying  ,
,  is a frequency whose corresponding circular
frequency is denoted by
is a frequency whose corresponding circular
frequency is denoted by  and related to it by
and related to it by  ,
,  is either a load case (see LOADCASE) or an angle of incidence
(see
is either a load case (see LOADCASE) or an angle of incidence
(see PLANEWAVE in HELMHOLTZ),  ,
,  and
and  are the structural stiffness, mass, and damping matrices, respectively,
are the structural stiffness, mass, and damping matrices, respectively,  and
and  are the acoustic fluid stiffness and mass matrices arising from
the discretization of
the Helmholtz operator, respectively, the matrix
are the acoustic fluid stiffness and mass matrices arising from
the discretization of
the Helmholtz operator, respectively, the matrix  arises when the formulation of the acoustic subproblem includes an absorbing boundary condition,
arises when the formulation of the acoustic subproblem includes an absorbing boundary condition,  is the acoustic fluid density specified in MATERIAL,
is the acoustic fluid density specified in MATERIAL,
 is the speed of sound in the acoustic fluid and is also specified in MATERIAL,
is the speed of sound in the acoustic fluid and is also specified in MATERIAL,  is a fluid-structure coupling matrix,
is a fluid-structure coupling matrix,  ,
,  ,
,  , and
, and  denote the amplitude vectors of the time-harmonic
structural displacement (
denote the amplitude vectors of the time-harmonic
structural displacement (  ), pressure fluctuation field (
), pressure fluctuation field (  ), structural external forcing input (
), structural external forcing input (  ), and acoustic fluid external forcing input (
), and acoustic fluid external forcing input (  ),
respectively, and the superscript
designates the transpose operation. Specifically, this command can be
used to perform: (1) a single frequency/single source analysis, (2) a
single frequency/multiple
sources analysis, (3) a frequency sweep/single source analysis, and (4) a
frequency sweep/multiple source analysis, where a source refers here to
a source term (or right hand-side) associated with
a LOADCASE or an angle of incidence generated using
),
respectively, and the superscript
designates the transpose operation. Specifically, this command can be
used to perform: (1) a single frequency/single source analysis, (2) a
single frequency/multiple
sources analysis, (3) a frequency sweep/single source analysis, and (4) a
frequency sweep/multiple source analysis, where a source refers here to
a source term (or right hand-side) associated with
a LOADCASE or an angle of incidence generated using PLANEWAVE in HELMHOLTZ.
- To identify within a specified range of interest the
eigenvalues missed by a previous eigenvalue computation and their
corresponding eigenvectors.
For the purpose of frequency response analysis, structural damping can be represented in AERO-S using
two different approaches:
- The Rayleigh proportional damping, in which case the matrix
 takes the form
takes the form
 where and are two real scalars that may be specified in this
where and are two real scalars that may be specified in this IMPEDANCE command for the entire structure,
and/or in the MATERIAL command at the material and therefore element level
(see the sub-command keyword DAMPING_TYPE in MATERIAL).
- The concept of loss factor introduced in the Young modulus of a given material — and thererefore at the element
level of a finite element model — as follows
 where
where  denotes the element-level Young modulus, the star superscript designates the "damped" Young modulus, denotes
the pure imaginary number satisfying , the minus sign in
denotes the element-level Young modulus, the star superscript designates the "damped" Young modulus, denotes
the pure imaginary number satisfying , the minus sign in  is due to the convention ,
and
is due to the convention ,
and  is the Young modulus loss factor. In general, is a function of the frequency. This function may be
specified in the MATERIAL command (see the sub-command keyword
is the Young modulus loss factor. In general, is a function of the frequency. This function may be
specified in the MATERIAL command (see the sub-command keyword DAMPING_TYPE in MATERIAL), or more generally in
the form of one or multiple lookup tables (or curves) in SDETAFT.
If the physical domain of the acoustic fluid is unbounded but its computational support is truncated by an artificial boundary
surface, is a complex sparse matrix that arises from the discretization on this surface of the absorbing boundary
specified in HELMHOLTZ. Alternatively, if the computational support of an infinite acoustic fluid domain is truncated
using a perfectly matched layer (PML) whose properties are specified in MATERIAL, is a complex,
non-Hermitian matrix with non-zero entries only at the degrees of freedom inside the PML. If the parameters of the PML are kept
constant when the frequency is varied, or the physical acoustic fluid domain is bounded and delimited by boundary surfaces of
the structural domain, the above block matrix equation can be re-written in terms of complex non-Hermitian matrices
and  so that
so that  .
.
The coupling matrix is automatically constructed by AERO-S when the HWIB or FSINTERFACE
command is
present in the input file, and set to zero otherwise. The amplitude
vector of the time-harmonic structural external forcing input,  ,
can be modeled using either the FORCES or PRESSURE command, as appropriate. The amplitude vector of the time-harmonic
acoustic fluid external forcing input,
,
can be modeled using either the FORCES or PRESSURE command, as appropriate. The amplitude vector of the time-harmonic
acoustic fluid external forcing input,  , can be modeled using the HNEU command, or a combination of the HELMHOLTZ,
HDIR, and HDNB commands, as appropriate.
, can be modeled using the HNEU command, or a combination of the HELMHOLTZ,
HDIR, and HDNB commands, as appropriate.
The case of a purely acoustic problem is governed by the second row of the above block matrix equation after setting  .
That of a purely structural dynamic problem is given by the first row of the above block matrix equation after setting
.
That of a purely structural dynamic problem is given by the first row of the above block matrix equation after setting  .
.
Note 1: When structural damping is modeled using the concept of the Young modulus loss factor or the rubber material
damping approach, the variations of or  , ,
, ,  , and
, and  with the frequency are
described using curves (or lookup tables) that are defined in SDETAFT or RUBDAFT, and the frequency sweep a
nalysis is to be performed using a fast reconstruction algorithm, special attention should be paid to ensure that:
with the frequency are
described using curves (or lookup tables) that are defined in SDETAFT or RUBDAFT, and the frequency sweep a
nalysis is to be performed using a fast reconstruction algorithm, special attention should be paid to ensure that:
- In the frequency band of interest — that is, in the frequency band where a sweep is requested — , , ,
and are defined, as needed.
- The frequency band of interest defined as above does not contain within it, except perhaps at its end points,
any of the frequency points specified in SDETAFT or RUBDAFT to define a curve. This is because the fast frequency
response algorithms implemented in AERO-S assume that , , , and are affine functions
of within the frequency band where the sweep is to be performed.
Note 2: Because of the limitation noted in the second bullet above, the IMPEDANCE command can be repeated multiple times
in the same input file with different parameters to enable a convenient approach for performing a frequency sweep
analysis in a large frequency band where , , , or is not an affine function of the
frequency , but can be well approximated by a piece-wise linear function of : in this case, the frequency band of
interest can be partitioned into multiple contiguous frequency bands within each , , , and
can be assumed to be affine functions of , and a separate IMPEDANCE command can be designed and included in
the same input file for performing a frequency sweep analysis in each frequency band.
Note 3: The brute force approach for performing a frequency sweep analysis consists of rebuilding and solving the problem
 for each sampled parameter point
for each sampled parameter point  . It is obtained by
choosing
. It is obtained by
choosing Taylor 0 for RECONS.
The input format of this command is given below.
SWEEP_ID
| Optional non-negative integer which identifies explicitly a sweep case (integer). The default value is 0.
Hence, the IMPEDANCE command can be repeated as many times as desired within the same input file using
each time a different value for SWEEP_ID and different parameters. Doing so defines a multiple sweep case
that is managed by the IMPEDANCE command itself.
|
FREQ
| Sub-command keyword for specifying a forced frequency in the case of a single frequency response analysis (characters).
|
|
| Value of the forced frequency (real). The corresponding value of is  . .
|
RAYDAMP
| Sub-command keyword for specifying Rayleigh proportional damping coefficients for the entire structure (characters).
|
|
| Rayleigh damping stiffness coefficient (real).
|
|
| Rayleigh damping mass coefficient (real).
|
FREQSWEEP1
| Sub-command keyword for
requesting a frequency sweep analysis using a one-point configuration of
the reconstruction algorithm specified after the sub-command keyword RECONS (characters).
In this case, the following (  ) frequencies are swept in the frequency band ) frequencies are swept in the frequency band 
 This sub-command does not support frequency sweep problems with multiple right hand-sides.
This sub-command does not support frequency sweep problems with multiple right hand-sides.
|

| Frequency defining the center of the frequency band (real).
|

| Frequency sweep increment (real).
|

| Together with and , this parameter defines the frequency band (integer).
|
FREQSWEEP
| Sub-command keyword for requesting a frequency sweep analysis in a frequency band  of interest using a
reconstruction algorithm specified after the sub-command keyword of interest using a
reconstruction algorithm specified after the sub-command keyword RECONS (characters). In this case, the user
can choose between two different schemes for specifying a set of interpolation frequency points within
— that is,
a set of frequencies where the response and its first few
consecutive frequency derivatives are to be computed using the brute
force approach — and then sampling frequencies in and rapidly computing the frequency response function
at these points using the reconstruction algorithm alg specified after the sub-command keyword RECONS
discussed below.
The first scheme, referred to here as the "regular" sampling scheme, introduces  equally-spaced interpolation frequencies
equally-spaced interpolation frequencies  in , including in , including  and and  . Hence, these frequencies
are given by . Hence, these frequencies
are given by

Then, the regular scheme samples each interval  into into  equal
frequency increments, and therefore into ( equal
frequency increments, and therefore into (  ) frequency points including ) frequency points including  and and  ,
where it rapidly reconstructs the frequency response function using the algorithm ,
where it rapidly reconstructs the frequency response function using the algorithm alg.
Hence, the first scheme computes the frequency response at  frequencies in the frequency
band (counting and ). frequencies in the frequency
band (counting and ).
The second scheme, referred to here as the "irregular" sampling scheme, requires the user to specify first on the first line
after the keyword FREQSWEEP the lower end of the frequency spectrum, , and then every other desired
interpolation frequency (in ascending order) on a separate line together with an integer number  specifying the sampling of the interval into
specifying the sampling of the interval into  equal frequency increments. Hence,
it defines ( equal frequency increments. Hence,
it defines (  ) sampling frequencies in including and
. The upper end of the frequency spectrum, , is in this case the last inputted interpolation frequency.
It follows that if, for example, ) sampling frequencies in including and
. The upper end of the frequency spectrum, , is in this case the last inputted interpolation frequency.
It follows that if, for example,  interpolation frequencies are inputted by the user, and is
set to interpolation frequencies are inputted by the user, and is
set to  for all (again, for example), the second scheme computes the frequency response also at
frequencies in the frequency band , including and . for all (again, for example), the second scheme computes the frequency response also at
frequencies in the frequency band , including and .
This sub-command does not support frequency sweep problems with
multiple right hand-sides, except when performing the brute force
approach (see alg below).
|
|
| Lower end of the frequency band of interest (real).
|
|
| Upper end of the frequency band of interest (real).
|
|
| Number of equally-spaced interpolation frequencies to introduce in the frequency band of interest
, including and (integer). Hence, these frequencies are given by
|
|
| When part of the definition of FREQSWEEP, this parameter specifies the number of equally-spaced frequency intervals
in which a frequency "sub-band"  — where and are interpolating
frequencies (see above) — is to be sampled (integer). In this case, is sampled into ( )
frequencies, including and . When part of the definition of — where and are interpolating
frequencies (see above) — is to be sampled (integer). In this case, is sampled into ( )
frequencies, including and . When part of the definition of FREQSWEEPA or FREQSWEEPAW,
this parameter specifies the number of equal size frequency intervals in which the frequency band of interest is to be sampled (integer).
In this case, is sampled into ( ) frequencies, including and . When part of the definition of FREQSWEEP, the
inputted value of this parameter must satisfy . When part of the definition of FREQSWEEPA or FREQSWEEPAW, it must satisfy  .
In both cases, the frequency response function is computed at all sampled frequency points. .
In both cases, the frequency response function is computed at all sampled frequency points.
|
|
| Interpolation frequency (real).
|
|
| Number of equal size frequency increments in which a frequency interval of the form
is to be sampled (integer). In this case, is sampled into ( )
frequency points.
|
FREQSWEEPA
| Sub-command keyword requesting an adaptive frequency sweep analysis in a frequency band of interest
using a reconstruction algorithm specified after the sub-command keyword RECONS
(characters). In this case, the user can
set the maximum number of interpolation frequencies, specifiy the
number of frequencies to sample and at which to reconstruct
the frequency response function, specify the reconstruction
algorithm, and tune some of the parameters of the automatic
adaptation procedure. This sub-command supports frequency sweep
problems with multiple right hand-sides.
|
FREQSWEEPAW
| Sub-command keyword requesting an adaptive sweep analysis in the or domain using a windowing strategy with a rotating buffer along
the frequency axis, and a reconstruction algorithm specified after the sub-command keyword RECONS (characters). The frequency is varied in the band of interest,
and the parameter  , when applicable, is varied in another band of interest , when applicable, is varied in another band of interest  or in a set of values or in a set of values  .
This sub-command supports frequency sweep problems with multiple right hand-sides. .
This sub-command supports frequency sweep problems with multiple right hand-sides.
|
IMOR
| Speficies an interpolatory model order reduction algorithm for the adaptive frequency sweep procedures associated with
the sub-command keywords FREQSWEEPA and FREQSWEEPAW (characters). Currently, three options are available: (1) KrylovGalProjection,
(2) GalProjection, and (3) WCAWEGalProjection. These three algorithms are the same as those associated with the
sub-command keyword RECONS and are described below. It is recommended to use KrylovGalProjection as much as
possible, except for acoustic scattering problems and coupled fluid-structure interaction problems with structural damping
and/or absorbing boundary conditions where KrylovGalProjection is not valid.
|
|
| Specifies the tolerance level for assessing the convergence of the adaptive frequency sweep procedures associated with
the sub-command keyword FREQSWEEPA and FREQSWEEPAW using the criterion
 where
where  is the reconstructed value of using the chosen interpolatory model order reduction algorithm (real).
The recommended setting for this parameter is is the reconstructed value of using the chosen interpolatory model order reduction algorithm (real).
The recommended setting for this parameter is  , and the default setting is , and the default setting is
 . .
|

| Specifies the maximum number of interpolation frequencies for the adaptive frequency sweep procedure associated with
the sub-command keyword FREQSWEEPA. The recommended practice is  (integer). If for such a
setting of this parameter the value of the tolerance level (see below) is not reached, a higher value
of should be used, or the frequency band of interest should be split in two smaller bands and
a separate frequency sweep should be performed in each one of them instead. The default value of is 6. (integer). If for such a
setting of this parameter the value of the tolerance level (see below) is not reached, a higher value
of should be used, or the frequency band of interest should be split in two smaller bands and
a separate frequency sweep should be performed in each one of them instead. The default value of is 6.
|

| Specifies the minimum number of solution vectors to be computed per interpolation frequency for the adaptive
frequency sweep procedure associated with the sub-command keyword FREQSWEEPA (integer). The recommended value is the default
value  . .
|

| Specifies the maximum number of solution vectors to be computed per interpolation frequency for the adaptive
frequency sweep procedure associated with the sub-command keyword FREQSWEEPA (integer). The recommended values are  for the
for the KrylovGalProjection algorithm, and  - -  for the for the GalProjection algorithm. The default values
for this parameter are 16 when IMOR = GalProjection, and 48 when IMOR = KrylovGalProjection.
|

| Specifies the increment number of solution vectors per interpolation frequency to be considered for computation
for the adaptive frequency sweep procedure associated with the sub-command keyword FREQSWEEPA (integer). The recommended
value is the default value  . .
|
localflag
| This integer parameter can be be
set either to 0 or to 1. It controls the functioning of the adaptive
frequency sweep with a windowing strategy command FREQSWEEPAW for
problems with multiple right hand-sides specified using the command LOADCASE or the sub-command PLANEWAVE in HELMHOLTZ. If localflag = 0, a global Interpolatory
Reduced-Order Model (IROM) is constructed for the strip  or or  using the information computed at the interpolatory
parameter points determined at the boundaries of this strip, and
applied to the reconstruction of the solution at every sampled point
inside this strip. This setting is suitable for
frequency sweep problems with multiple right hand-sides specified
using the sub-command
using the information computed at the interpolatory
parameter points determined at the boundaries of this strip, and
applied to the reconstruction of the solution at every sampled point
inside this strip. This setting is suitable for
frequency sweep problems with multiple right hand-sides specified
using the sub-command PLANEWAVE in HELMHOLTZ because the underlying computational strategy relies on the describability
of the multiple right hand-sides by a continuous function of a single parameter. If localflag = 1, the reduced-order basis  is computed during the windowing strategy using the same
interpolatory parameters as those determined for the computation of is computed during the windowing strategy using the same
interpolatory parameters as those determined for the computation of  , and the solutions in the strip , and the solutions in the strip  or the set or the set
 are computed using a set of local IROMs. Each local IROM is constructed for an interval are computed using a set of local IROMs. Each local IROM is constructed for an interval  using information computed at the
two points using information computed at the
two points  and , and used to reconstruct the solutions at all parameter points sampled inside the interval and , and used to reconstruct the solutions at all parameter points sampled inside the interval  .
Hence, the setting .
Hence, the setting localflag = 1 is suitable for frequency sweep problems with multiple right hand-sides specified using the command LOADCASE as the underlying computational approach
builds independent projections for each right hand-side.
|

| Specifies the total number of snapshot vectors to be computed per interpolation frequency or interpolation point for the adaptive sweep procedure
with a windowing strategy FREQSWEEPAW (integer).
|
tol
| Tolerance for determining the placement of the next interpolation frequency in the context of the adaptive sweep procedure with a windowing strategy FREQSWEEPAW. A suitable
value is such that tol*epsilon  (real). (real).
|
tol1f
| Tolerance for controling the global-within-one-frequency algorithm (localflag = 0) that attempts to ensure that residual at the interpolation frequency is less than
tol*tol1f (real).
A suitable value is tol1f =  . .
|
RECONS
| Sub-command keyword for defining
a reconstruction algorithm in the case of a frequency sweep analysis
and setting its parameters (characters).
|
alg
| Name of the reconstruction algorithm (characters). Six such algorithms are available and listed below. The default
value is Taylor with 8 derivatives. The brute force reconstruction algorithm corresponds to Taylor with 0
derivative.
|
Taylor
| Taylor series expansion algorithm (characters).
|
Pade
| Conventional multipoint Pade series expansion algorithm (characters).
|
PadeLanczos
| Multipoint Pade series expansion
algorithm based on a Lanczos procedure (characters). This algorithm is
less prone to ill-conditioning and therefore better performing
than the Pade algorithm. However, it is available only for purely structural or acoustic undamped frequency response problems where furthermore
 and are symmetric. and are symmetric.
|
KrylovGalProjection
| Interpolatory model order reduction algorithm based on a Galerkin projection and a Krylov subspace (characters). This algorithm,
which cannot be used for acoustic scattering problems and coupled fluid-structure problems with structural damping and/or
absorbing boundary conditions, delivers nevertheless a much better performance than both of the Pade and
GalProjection algorithms for all other frequency response problems of the form given at the beginning of the description
of the IMPEDANCE command. It is also known as the KGP algorithm.
|
GalProjection
| Interpolatory model order
reduction algorithm based on a Galerkin projection and orthogonalized
frequency derivatives (characters).
This algorithm is also known as the DGP algorithm.
|
WCAWEGalProjection
| Interpolatory model order
reduction algorithm based on the combination of the Well-Conditioned
Asymptotic Waveform Evaluation (WCAWE) scheme, and the multipoint
Galerkin
projection interpolatory scheme with orthogonalized vectors. This
algorithm is also known as the WCAWE+DGP algorithm. It is is preferred to GalProjection
for acoustic
scattering problems and coupled fluid-structure interaction
problems with structural damping or absorbing boundary conditions.
|
para_1
| For the Taylor algorithm, this parameter specifies the order of the Taylor series (integer). For the
Pade, PadeLanczos, GalProjection, and KrylovGalProjection algorithms, it specifies how many of the
interpolation frequencies to use at a time to apply a multipoint version of the chosen reconstruction
algorithm. (Note however that for GalProjection and KrylovGalProjection, para_1 = 1 and para_1 =
are currently the only options).
|
para_2
| This parameter is relevant only for the Pade, GalProjection, and KrylovGalProjection reconstruction
algorithms (integer). For Pade, it specifies the order of the numerator of the rational function
(L of [L/M]) (integer). For GalProjection, it specifies the number of frequency derivatives of the response to
compute at each interpolation frequency. For KrylovGalProjection, it specifies the number of Krylov vectors to
compute at each interpolation frequency.
|
para_3
| This parameter is relevant only for the Pade and PadeLanczos reconstruction algorithms.
It specifies the order of the denominator of the rational function (M of [L/M]) (integer).
|
PADEPOLES
| This sub-command keyword is active only with alg = PadeLanczos and needs input from the sub-command FREQSWEEP
(see above) (characters). It also requires the presence in the input file of the MODE command to retrieve the EIGENMODES
file or files associated with a previous eigen computation. This (these) file(s) should be placed in the execution path.
In this case, this sub-command instructs AERO-S to: (1) compute the approximation by a multipoint Pade expansion
of a rational transfer function whose poles are exactly the eigenvalues of the symmetric pencil of interest (  ),
and (2) exploit these poles to identify, in a specified range of interest ),
and (2) exploit these poles to identify, in a specified range of interest  , the eigenvalues that may
have been missed by a previous eigen computation in which the MODE command was used to store the results in the
EIGENMODES file or files (characters). The multipoint Pade expansion is constructed using points , the eigenvalues that may
have been missed by a previous eigen computation in which the MODE command was used to store the results in the
EIGENMODES file or files (characters). The multipoint Pade expansion is constructed using points
 that should be generated by the sub-command that should be generated by the sub-command FREQSWEEP with  playing
the role of , playing
the role of ,  and and  (and for example, (and for example,  ).
The parameters of this expansion should be specified in ).
The parameters of this expansion should be specified in para_1, para_2 and para_3 (see above).
At the end of the computation, AERO-S outputs on the screen the poles of the Pade rational function
in the specified range , excluding those poles corresponding to the modes read from the EIGENMODES
file or files. The specified range can be narrower than that of the eigenvalues read in the EIGENMODES
file or files. However, if it is wider, some of the poles of the Pade rational function may, in some cases, not
correspond to missed eigenvalues. In any case, the output of the eigenvectors associated with the poles or missed
eigenvalues is not currently implemented in AERO-S.
|

| Lower end of an eigenvalue interval of interest (real).
|

| Upper end of an eigenvalue interval of interest (real).
|
74 INITIAL ACCELERATIONS (Not Supported Yet)
|
Command Statement: IACCELERATIONS
|
The IACCELERATIONS command statement is used to specify
a nodal acceleration type of initial conditions.
Each node can have up to six degrees of freedom.
NODE#
| Node number where the initial acceleration is specified (integer).
|
DOF#
| Degree of freedom local number where the initial acceleration is specified (integer).
|
VALUE
| Value of the specified initial acceleration (float).
|
75 INITIAL DISPLACEMENTS *S*
|
Command Statement: IDISPLACEMENTS
|
For a structural analysis, the IDISPLACEMENTS command can be used to specify initial conditions for the nodal displacement degrees of freedom (dofs),
or the generalized coordinates of a reduced-order representation of the displacement field.
For a time-domain acoustic analysis, this command can be used to specify nodal values of the initial solution by setting DOF# to 8 (see below).
Note 1: All nodal degrees of freedom referred to by this command are defined in the nodal degree of freedom reference frames
defined at the nodes where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal
degree of freedom reference frames are the same as the global reference frame.
Note 2: In the context of a linearized (perturbation) analysis, the initial displacements specified under this command
are interpreted as initial displacement perturbations.
Note 3: If both IDISPLACEMENTS and IDISP6 commands are specified in the ASCII Input Command Data file, then:
- If the structural dynamics analysis to be performed is not based on a
projection-based Reduced-Order Model (ROM), or if it is based on a
projection-based ROM as in the sub-command keyword
MODAL or SROM
of DYNAMICS but the initial displacement
inputted using this command is specified for the nodal displacement dofs
(and not generalized coordinates), then:
- If the GEPS command is not specified in this file, AERO-S selects the content of IDISP6
to initialize the displacement field.
- If the GEPS command is also specified in this file, AERO-S uses the content of
the IDISP6 command to construct the geometric stiffness, and that of
IDISPLACEMENTS to initialize
the displacement field.
- If the structural dynamics analysis to be performed is
based on a projection-based ROM, whether a modal one or not, and the
initial displacement inputted using this command is specified for the
generalized coordinates using
the sub-command keyword
MODAL, then:
- AERO-S initializes the displacement field using the
superposition of the projection onto the Reduced-Order Basis (ROB) of
the input to the IDISP6 command and the initial displacement inputted using the
sub-command keyword
MODAL of this command (IDISPLACEMENTS).
Note 4: If both of the GEPS and IDISP6 commands are present in the ASCII Input Command Data file
but the IDISPLACEMENTS command is not specified in this file, AERO-S uses the content
of IDISP6 to construct the geometric stiffness and initializes the incremental displacement field to zero.
Note 5: Even though it is intended primarily for structural dynamic computations, this command is also enabled
for quasistatic fluid-structure (aeroelastic) and fluid-thermal-structure (aerothermoelastic) steady-state (static)
computations (see QSTATICS). In such cases, it allows the transmittal to the flow solver AERO-F
of the initial structural displacement inputted using this command. Then, AERO-F:
- Computes the increment fluid-structure interface displacement defined by the traces on this interface of this
inputted displacement and that corresponding to the difference between the initial position of the CFD grid specified
in
Input.Position within the AERO-S ASCII Input Command Data file, and the original position
of this CFD mesh.
- Prescribes this increment interface displacement and computes the corresponding motion of the interior CFD grid points.
Note 6: For a dynamic simulation based on a hyper reduced
projection-based reduced-order model and its associated reduced mesh, a
high-dimensional initial displacement condition — from which the
corresponding
low-dimensional initial condition can be inferred by projection onto the
Reduced-Order Basis (ROB) inputted using READMODE
— can be specified using this command: only on the nodes attached to
the elements of the
inputted reduced mesh; and if the high-dimensional initial displacement
field is zero at all other nodes of the original mesh.
On the other hand, such an initial condition can be specified on all or
an arbitrary subset of nodes of the high-dimensional mesh in the same
ASCII Input Command Data file containing the RMSHC
command,
and therefore in the same simulation performed to construct the reduced
mesh: in this case, the initial condition for the vector of generalized
coordinates is computed offline and outputted in the same output
file containing the reduced mesh (see SAMPLMSH in OUTPUT).
Furthermore, if for some reason only the trace of the ROB on the
degrees of freedom of the reduced mesh is available — for example, when
the ROB is
randomized — a specified high-dimensional initial displacement condition
must be hyper reduced using the RMSHC command.
For nodal displacement dofs, the format of this command is as follows.
or
NODE#
| Node number where the initial displacement or acoustic field is specified (integer).
|
DOF#
| Local identification number of the degree of freedom where the initial displacement or acoustic field is specified (integer).
|
VALUE
| Value of the specified initial displacement or acoustic field (real).
|
ZERO
| This initializes the entire intital displacement or acoustic field to zero.
No other IDISPLACEMENTS data has to be entered when this
option is selected (characters).
|
For displacement generalized coordinates, the format of this command is as follows.
MODAL
| This sub-command keyword (characters) can be used to:
- Input the initial conditions for the generalized
coordinates associated with the ROB chosen for initializing the
displacement field.
- Superpose to the initial conditions specified in the
finite element coordinates system additional initial conditions
formulated in the generalized coordinates system
associated with the ROB chosen for this purpose, subject to
any restriction implied by the content of Note 3. An example where no restriction applies is one where
IDISPLACEMENTS is used to input both modal and
non-modal initial displacement conditions, where modal means in this
context an initial condition specified for the generalized coordinates
associated
with a chosen ROB, and non-modal means an initial condition
specified for the nodal displacement dofs. An example where a
restriction applies, is that where IDISPLACEMENTS is used to input modal initial displacement
conditions, and IDISP6 is used to input non-modal initial displacement conditions.
In the second case, IDISPLACEMENTS should be specified only once and the MODAL
sub-command and its associated data can be inserted either before or
after the data set
associated with the initial conditions specified in the finite
element coordinates system. This option can also be used to perform a
"Ping-Pong" analysis (AERO).
In all cases, the primal displacement ROB must be inputted in READMODE.
|
rob_id
| This parameter is relevant only when the second format of the READMODE command is used to input one or multiple ROBs. In this case, it is an integer number identifying the primal ROB
inputted in READMODE to be used to initialize the displacement field (integer).
|
MODE#
| Mode ID number (or column number
of the ROB identified above) whose generalized coordinate is to be
initialized below (integer).
|
VALUE
| Value of the specified initial condition (real).
|
76 INITIAL DISPLACEMENT 6 COLUMNS (IDISP6 completely spelled out) *S*
|
Command Statement: IDISP6 [ ]
|
The IDISP6 command statement is used to specify a nodal displacement type of initial conditions
in a different format than that of the IDISPLACEMENTS command. This format is specified below.
Note 1: All degrees of freedom referred to by this command are defined in the nodal degree of freedom
reference frames defined at the nodes where these degrees of freedom are attached (see NODES and NFRAMES).
By default, the nodal degree of freedom reference frames are the same as the global reference frame.
Note 2: If both this command and the command LMPC are specified in the input file, the content of IDISP6
must satisfy the linear multipoint constraints described in LMPC.
Note 3: If the GEPS command is not specified, and both IDISPLACEMENTS and IDISP6 commands are present in the input file, AERO-S selects
the IDISP6 command to initialize the displacement field.
Note 4: If the GEPS command is present in the input file, then AERO-S uses the content of the command IDISP6 to construct the geometric stiffness,
and the content of IDISPLACEMENTS, if available, to initialize the incremental displacement field.
Note 5: Because a generalized coordinate initial condition is
independent of the number of degrees of freedom at a node, its
specification in AERO-S is done in
IDISPLACEMENTS and therefore not supported by this command.
Note 6: In the context of a linearized (perturbation) analysis, the initial displacements specified under this command
are interpreted as initial displacement perturbations.
Note 7: Even though it is intended primarily for structural dynamic computations, this command is also enabled
for quasistatic fluid-structure (aeroelastic) and fluid-thermal-structure (aerothermoelastic) steady-state (static)
computations (see QSTATICS). In such cases, it allows the transmittal to the flow solver AERO-F
of the initial structural displacement inputted using this command. Then, AERO-F:
- Computes the increment fluid-structure interface displacement defined by the traces on this interface of this
inputted displacement and that corresponding to the difference between the initial position of the CFD grid specified
in
Input.Position within the AERO-S ASCII Input Command Data file, and the original position
of this CFD mesh.
- Prescribes this increment interface displacement and computes the corresponding motion of the interior CFD grid points.
|
IDISP6
|
|
NODE# VAL_DOF1 VAL_DOF2 VAL_DOF3 VAL_DOF4 VAL_DOF5 VAL_DOF6
|
|
| Amplification factor that multiplies each VAL_DOFi value for each node (real).
|
NODE#
| Node number where the initial displacement is specified (integer).
|
VAL_DOFi#
| Value of the specified initial displacement for the i-th degree of freedom (real).
|
77 INITIAL OR SEED DISPLACEMENT FOR PITA (IDISP6PITA completely spelled out)
|
Command Statement: IDISP6PITA
|
The IDISP6PITA command statement can be used to specify the time-slices' initial or seed displacements for the PITA
methodology (see PITA), thus overriding the alternative approach consisting of generating this information by applying
the basic time-integrator on the coarse time-grid. It is applicable in both linear and nonlinear settings.
Its syntax is similar to that of the IDISP6 (see IDISP6)
command except that it can introduce up to as many sets
of initial displacements as there are time-slices, one set per
time-slice. Each set of initial displacements must be input
after the previous one, starting with that corresponding to the first
time-slice and continuing in consecutive order.
All those time-slices for which a set of seed displacement values is not
specified are initialized by the aforementioned alternative approach.
Note 1: All degrees of freedom referred to by this command are
defined in the nodal degree of freedom reference frames defined at the
nodes
where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal degree of freedom reference frames are the same
as the global reference frame.
NODE# VAL_DOF1 VAL_DOF2 VAL_DOF3 VAL_DOF4 VAL_DOF5 VAL_DOF6
|
NUMSLICES
| Number of consecutive time-slices for which seed displacements are specified (integer).
|
NODE#
| Node number where the seed displacement is specified (integer).
|
VAL_DOFi#
| Value of the seed displacement for the i-th degree of freedom at the beginning of a time-slice (float).
|
78 INITIAL OR SEED VELOCITY FOR PITA (IVEL6PITA completely spelled out)
|
Command Statement: IVEL6PITA
|
The IVEL6PITA command statement can be used to specify the time-slices' initial or seed velocities for the PITA
methodology (see PITA), thus overriding the alternative approach consisting of generating this information by applying
the basic time-integrator on the coarse time-grid. It is applicable in both linear and nonlinear settings.
Its syntax is similar to that of the IDISP6 (see IDISP6)
command except that it can introduce up to as many sets
of initial velocities as there are time-slices, one set per time-slice.
Each set of initial velocities must be input
after the previous one, starting with that corresponding to the first
time-slice and continuing in consecutive order.
All those time-slices for which a set of seed velocity values is not
specified are initialized by the aforementioned alternative approach.
Note 1: All degrees of freedom referred to by this command are
defined in the nodal degree of freedom reference frames defined at the
nodes
where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal degree of freedom reference frames are the same
as the global reference frame.
NODE# VAL_DOF1 VAL_DOF2 VAL_DOF3 VAL_DOF4 VAL_DOF5 VAL_DOF6
|
NUMSLICES
| Number of consecutive time-slices for which seed velocities are specified (integer).
|
NODE#
| Node number where the seed velocity is specified (integer).
|
VAL_DOFi#
| Value of the seed velocity for the i-th degree of freedom at the beginning of a time-slice (float).
|
79 INITIAL TEMPERATURES *S*
|
Command Statement: ITEMPERATURES
|
The ITEMPERATURES command can be used to specify
initial conditions for the nodal temperature degrees of freedom (dofs)
or temperature generalized coordinates
of a thermal model.
For nodal temperature dofs, the format of this command is as follows.
NODE#
| Node number where the initial temperature is specified (integer).
|
VALUE
| Value of the specified initial temperature (real).
|
For temperature generalized coordinates, the format of this command is as follows.
ITEMPERATURES |
| MODAL | rob_id
| MODE# | VALUE
|
|
MODAL
| This sub-command keyword can be
used to input the initial conditions for the generalized coordinates
associated with the Reduced-Order Basis (ROB) chosen for initializing
the temperature field.
When this option is used, it must also be specified in DYNAMICS, and the primal temperature Reduced-Order Basis (ROB) must be inputted using READMODE.
|
rob_id
| This parameter is relevant only when the second format of the READMODE command is used to input one or multiple ROBs. In this case, it is an integer number identifying the primal ROB
inputted in READMODE to be used to initialize the temperature field (integer).
|
MODE#
| Mode ID number (or column number
of the ROB identified above) whose generalized coordinate is to be
initialized below (integer).
|
VALUE
| Value of the specified initial condition (real).
|
80 INITIAL VELOCITIES *S*
|
Command Statement: IVELOCITIES
|
For a structural analysis, the IVELOCITIES command
can be used to specify initial conditions for the nodal velocity degrees
of freedom (dofs),
or the generalized coordinates of a reduced-order representation of the
velocity field.
For a time-domain acoustic analysis, this command can be used to specify
nodal values of the initial time-derivative of the solution by setting DOF# to 8 (see below).
Note 1: All degrees of freedom referred to by this command
are defined in the nodal degree of freedom reference frames defined at
the nodes
where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal degree of freedom reference frames are the same
as the global reference frame.
Note 2: For a dynamic simulation based on a hyper reduced
projection-based reduced-order model and its associated reduced mesh, a
high-dimensional initial velocity condition — from which the
corresponding
low-dimensional initial condition can be inferred by projection onto the
Reduced-Order Basis (ROB) inputted using READMODE
— can be specified using this command: only on the nodes attached to
the elements of the
inputted reduced mesh; and if the high-dimensional initial velocity
field is zero at all other nodes of the original mesh.
On the other hand, such an initial condition can be specified on all or
an arbitrary subset of nodes of the original mesh in the same ASCII
Input Command Data file containing the RMSHC
command,
and therefore in the same simulation performed to construct the reduced
mesh: in this case, the initial condition for the vector of generalized
coordinates is computed offline and outputted in the same output
file containing the reduced mesh (see SAMPLMSH in OUTPUT).
Furthermore, if for some reason only the trace of the ROB on the
degrees of freedom of the reduced mesh is available — for example, when
the ROB is
randomized — a specified high-dimensional initial velocity condition
must be hyper reduced using the RMSHC command.
For nodal velocity dofs, the format of this command is as follows.
NODE#
| Node number where the initial velocity is specified (integer).
|
DOF#
| Degree of freedom local number where the initial velocity is specified (integer).
|
VALUE
| Value of the specified initial temperature (real).
|
For velocity generalized coordinates, the format of this command is as follows.
MODAL
| This sub-command keyword (characters) can be used to:
- Input the initial conditions for the generalized
coordinates associated with the Reduced-Order Basis (ROB) chosen for
initializing the velocity field.
- Superpose to the initial conditions specified in the
finite element coordinates system additional initial conditions
formulated in the generalized coordinates system
associated with the ROB chosen for this purpose.
In the second case, IVELOCITIES should be specified only once, and the MODAL
sub-command and its associated data can be inserted either before or
after the data set
associated with the initial conditions specified in the finite
element coordinates system. This option can also be used to perform a
"Ping-Pong" analysis (AERO).
In all cases, the primal velocity ROB must be inputted using READMODE.
|
rob_id
| This parameter is relevant only when the second format of the READMODE command is used to input one or multiple ROBs. In this case, it is an integer number identifying the primal ROB
inputted in READMODE to be used to initialize the velocity field (integer).
|
MODE#
| Mode ID number (or column number
of the ROB identified above) whose generalized coordinate is to be
initialized below (integer).
|
VALUE
| Value of the specified initial condition (real).
|
81 INTRUSIVE POLYNOMIAL CHAOS
The INPC command signals to the AERO-S code to perform an intrusive non deterministic analysis using the Polynomial Chaos representation of the solution.
It requires that the input file also contains the GROUPS, RANDOM, and STATICS commands and their
respective data.
Note 1: Currently, this command is limited to linear, static, structural analysis.
Note 2: Currently, this command is supported only by the PCG, BCG, and CR iterative solvers (see STATICS).
The input format of this command is given below.
DEG_OUT
| Degree of the polynomial chaos representation of the solution (integer).
|
82 LINEAR MATERIAL PROPERTIES *S*
|
Command Statement: MATERIAL
|
The MATERIAL command should be used for any of the following purposes:
- For structural analysis problems:
- Define one or several material ID numbers to be assigned to elements of the computational model using the command ATTRIBUTES, and for each defined material ID number:
- Specify the parameters of the linear elastic material
law for a linear analysis and those of the default material law (see
below) for a nonlinear analysis.
- Specify the geometrical properties of the elements of the computational model assigned this material ID number.
To this end, the user should know that AERO-S assigns default material laws to the elements of a computational structural model as follows:
- For a bar, beam, or shell element, it assigns the linear
elastic material law. In this case, this command should be used to
specify the properties of this material law
for each defined material ID number. In the presence
of the command NONLINEAR in the ASCII Input Command Data file, AERO-S activates the geometrically nonlinear formulation
of the internal force vector and tangent stiffness matrix using the corotational approach.
- For a 3D solid element or a membrane element type 128 or 129:
- In the absence of the command NONLINEAR in the ASCII Input Command Data file, AERO-S assigns the linear elastic material law. Again, this command should be used to
specify the properties of this material law for each defined material ID number.
- In the presence of the command NONLINEAR in the ASCII Input Command Data file, AERO-S
assigns the Saint Venant-Kirchhoff hyperelastic law and
activates the geometrically nonlinear
formulation of the internal force vector and tangent stiffness matrix
using the total Lagrangian method. The Saint Venant-Kirchhoff
hyperelastic material law is an extension of
the linear elastic material model to the nonlinear regime. It has the
form

where  is the second Piola-Kirchhoff stress tensor,
is the second Piola-Kirchhoff stress tensor,
is the Green-Lagrange strain tensor,  and
and  are the Lame constants, and
are the Lame constants, and  is the second-order unit tensor.
AERO-S deduces the Lame properties of this material law from the values of the Young modulus and Poisson ratio – which should be specified for each defined material ID
number using this command – as follows
is the second-order unit tensor.
AERO-S deduces the Lame properties of this material law from the values of the Young modulus and Poisson ratio – which should be specified for each defined material ID
number using this command – as follows

The strain-energy density function for the Saint Venant-Kirchhoff model is defined as
and the second Piola-Kirchhoff stress is given by

Otherwise, the user can use the command MATLAW to define or select among a large list of pre-defined more general material laws, and the command MATUSAGE to attribute them to the
elements of the computational domain.
- Specify the method to use to enforce
constraints associated with joint and rigid elements assigned the
aforementioned material ID number.
- For linear acoustic and acoustic scattering analysis
problems in the frequency or time domain, for linear and nonlinear
thermal (heat transfer) problems, and for linear hygro (moisture
transfer)
problems:
- Define a material ID number to be assigned to elements of the computational model using the command ATTRIBUTES, and:
- Specify the physical properties of the governing
equations for the elements of the computational model assigned the
aforementioned material ID number.
- Specify the geometrical properties of the elements of the computational model assigned the aforementioned material ID number.
Several input formats are possible for this command and are described below.
Note 1: This command is required in any AERO-S ASCII Input Command Data file, even when such a file contains the commands MATLAW and MATUSAGE.
Note 2: Even for a given input format, the interpretation of a data entry can change
from one element type to another. For example for the first input format, the main interpretation of some data entries
changes when the element type is that of a lumped torsional spring, a torsional spring connector,
a linear spring connector, a Timoshenko beam, a thermal element, a rigid translational link, or a rigid rotational link.
Note 3: A non-structural mass is defined here and throughout this User's Reference Manual as a discrete mass that is attributed
to an element, and which therefore affects the mass matrix of this element and its contribution to a gravity load. Specifically,
it affects only the translational degrees of freedom attached to this element, in the same manner as a discrete mass that is
specified for a translational degree of freedom attached to a specified node (see the command DIMASS).
Note 4: For composite elements, this command is not required unless stress and/or strain output is
requested. Even in this case, only the total thickness of the element must be specified under this command.
Dummy or zero values can be entered for the other properties as their real values should be specified under
the COMPOSITE command.
Note 5: The Perfectly Matched Layer (PML) method is supported only by the elements type 95, 96, 98, and 99.
Note 6: Specifying under this command a method for
enforcing the constraints associated with joint and/or rigid elements
sharing a certain material ID number overrides
for these elements the specification under CONSTRAINTS of a default method for enforcing constraints.
MID
| The material id number.
|
A
| Cross sectional area for trusses, beams, and lineal thermal elements (float).
|
E
| Young's Modulus for all element types (float). However, this field can also be filled by a negative integer in which case
it means that Young's Modulus is a function of temperature and is to be determined from the YMTT and TEMPERATURES commands.
In the latter case, the integer specified here points to the id of the Young's modulus-temperature table in the YMTT command (negative integer).
|
|
| Poisson's ratio for all element types except trusses (float).
|

| Mass density per unit volume accounting for both structural and non-structural types of mass (see definition in the Notes section above), except in the following situations (float):
- For a composite or orthotropic shell element (type 15, 1515,
20, and 2020) and when the composite properties are defined using the
COEF option (see COMPOSITE), this parameter
denotes the mass density per unit area and accounts for both structural and non-structural types of mass.
- For a composite or orthotropic shell element (type 15,
1515, 20, and 2020) and when the composite properties are defined using
the
LAYC option (or a combination
of LAYD and LAYMAT, see COMPOSITE) or the LAYN option (or a combination of LAYO and LAYMAT, see COMPOSITE),
and for any other composite shell
element (type 8, 88, 16, 73, and 76), this parameter denotes the
mass density per unit area of the non-structural type of mass only. In
this case, the density associated with
the structural type of mass should be specified for each
individual material layer using the command COMPOSITE.
For nonlinear thermal and fluid-thermal (aerothermal) analysis,
the mass density may be a function of temperature. In this case, this
parameter should be set to a negative number, the
temperature-dependent mass density should be inputted using the
command DCTT, and the absolute value of the negative integer inputted here is interpreted by AERO-S to be
the ID of the mass density-temperature table inputted using the command DCTT (negative integer).
|
h
| Heat convection coefficient (only for boundary convection elements: type 47, 48, and 49 (float)).
|
k
| Heat conduction coefficient
(float). For nonlinear thermal and fluid-thermal (aerothermal) analysis,
this coefficient may be a function of temperature. In this case, this
parameter should be
set to a negative number, the temperature-dependent heat
conduction coefficient should be inputted using the command CCTT, and the absolute value of the negative integer inputted here is
interpreted by AERO-S to be the ID of the heat conduction coefficient-temperature table inputted using the command CCTT (negative integer).
|
t
| Element thickness (float).
|
P
| Perimeter/circumference area for thermal elements (float), or the depth of the boundary where convection
occurs when element type 47 is used to model non-lateral boundary convection (float).
|
Ta
| Reference temperature (Absolute) of the element (float). WARNING: if this value is different from the nodal temperature of that element (see TEMPERATURES), it creates a thermal
loading even in a pure structural analysis.
|

| Specific heat coefficient in a
thermal analysis (float). For nonlinear thermal and fluid-thermal
(aerothermal) analysis, this coefficient may be a function of
temperature. In this case,
this parameter should be set to a negative number, the
temperature-dependent specific heat coefficient should be inputted using
the command SCTT, and the absolute value of the negative
integer inputted here is interpreted by AERO-S to be the ID of the specific heat coefficient-temperature table inputted using the command SCTT (negative integer).
|

| Coefficient of thermal expansion in either a thermal analysis, or a structural analysis if the specified reference temperature Ta is different from the specified nodal temperatures (see TEMPERATURES
and THERMOE) (float). In a thermal analysis, this field can also be filled by a negative integer meaning that the coefficient of thermal expansion is a function of temperature and is to be determined from
the TETT and TEMPERATURES commands. In this case, the integer specified here points to the id of the coefficient of thermal expansion-temperature
table in the TETT command (negative integer).
|
Ixx/ss
| For a mechanical analysis (MECH under the DYNAMICS command), this is
the cross-sectional moment of inertia about the local and centroidal x-axis. For an acoustic analysis
in the time-domain (ACOU under the DYNAMICS command), this is the speed of sound in the medium
represented by the attribute number.
|
Iyy
| Cross-sectional moment of inertia about the local and centroidal principal y-axis.
|
Izz
| Cross-sectional moment of inertia about the local and centroidal principal z-axis.
|
ymin
| Negative local y-coordinate of the bottom fiber of a beam cross section.
|
ymax
| Positive local y-coordinate of the top fiber of a beam cross section.
|
zmin
| Negative local z-coordinate of the top fiber of a beam cross section.
|
zmax
| Positive local z-coordinate of the top fiber of a beam cross section.
|
DAMPING_TYPE
| Optional sub-command keyword to specify a type of damping (characters). Two options are currently available:
|
RAYDAMP
| This option specifies a Rayleigh proportional type of damping for structural dynamic (see DYNAMICS) or frequency response (see IMPEDANCE) analysis.
In this case, damping is introduced at the element level in the form of a finite element damping matrix  that is
constructed as that is
constructed as
 where
where  and and  denote the element-level mass and stiffness matrices, respectively, and and are two real
coefficients that are specfied below. denote the element-level mass and stiffness matrices, respectively, and and are two real
coefficients that are specfied below.
|
STRDAMP
| This option specifies a structural type of damping for frequency response analysis (see IMPEDANCE). In this case,
damping is introduced in the form of the following modified local (element-level) Young modulus
where denotes here the element-level Young modulus, the star superscript designates the modified Young modulus, denotes
the pure imaginary number satisfying , the minus sign in is due to the convention
(see IMPEDANCE), and is the Young modulus loss factor. In general, is a function
of the forced frequency  . If in the frequency range of interest can be represented as a linear
function of — that is, . If in the frequency range of interest can be represented as a linear
function of — that is,
this linear representation can be specified in the MATERIAL command by inputting  and and  below and specifying in IMPEDANCE. Otherwise, an arbitrary variation of the Young modulus loss factor with the
frequency can be inputted in the form a lookup table (or curve) using SDETAFT, in which case given a frequency
specified in IMPEDANCE, is determined by local interpolation.
below and specifying in IMPEDANCE. Otherwise, an arbitrary variation of the Young modulus loss factor with the
frequency can be inputted in the form a lookup table (or curve) using SDETAFT, in which case given a frequency
specified in IMPEDANCE, is determined by local interpolation.
|
RUBDAMP
| This option is supported only for the tetrahedral and hexahedral (brick) solid elements
(type = 17, 23, 25, 72, 91, 102, or 103). It specifies a rubber material type of damping for frequency response analysis
(see IMPEDANCE). In this case, damping is introduced in the form of the following modified local (element-level) Young
modulus and shear modulus
where and denote here the element-level Young modulus and shear modulus, respectively, the star superscript designates
the modified moduli, denotes the pure imaginary number satisfying , the minus sign in is due to the
convention (see IMPEDANCE), and and are the Young modulus loss factor
and shear modulus loss factor, respectively. To specify , , , and , a distinction should be made
between two cases:
- The particular case where all of , , , and are frequency independent. In this case, and only
in this case, should be specified as usual, Poisson's ratio should be also specified as usual, is deduced by
AERO-S from and , and and should be inputted in and , respectively
(see below).
- The general case where some or all of the parameters , , , and are functions of the forced
frequency . In this case, arbitrary variations of these properties with the frequency (including
a constant behavior, if any) must be inputted in the form of a lookup table that is defined in RUBDAFT
and assigned using the parameter (see below); then, given a frequency specified under IMPEDANCE, , ,
, are determined by AERO-S by local interpolation.
|
|
| If DAMPING_TYPE is set to RAYDAMP, specifies the Rayleigh damping stiffness coefficient (real) — that
is, the stiffness coefficient in the Rayleigh proportional damping matrix  for the material identified by for the material identified by
MID. In the nonlinear case, this coefficient is assigned at each iteration to the linearized stiffness matrix and the
product of these two quantities, which varies with the nonlinear iterations, constitutes the stiffness contribution to the
damping term. In a structural dynamic analysis, this value overrides for the material identified by MID any value of
the Rayleigh damping stiffness coefficient specified under DYNAMICS. In any analysis performed using the IMPEDANCE
command, this value overrides for the material identified by MID any value of the Rayleigh damping stiffness
coefficient specified under IMPEDANCE.
On the other hand, if DAMPING_TYPE is set to STRDAMP, has a different meaning that pertains to the loss
factor briefly discussed above. In this case, if the loss factor of the material identified by MID is to be
represented as a linear function of the frequency of the form (see above), then
and should be specified as such. However, if the loss factor is to be interpolated using an arbitrary lookup table
defined in SDETAFT, should be set to the negative integer value -curve_id (integer), where curve_id
is the "id number" of the relevant lookup table defined in SDETAFT using the sub-command keyword CURVE.
In that case, (see below) should be simply ignored.
If DAMPING_TYPE is set to RUBDAMP however, then:
- If all of the parameters , , , and are frequency independent,
 . .
- Otherwise — that is, if , , , or is a frequency dependent parameter — should be set to
the negative integer value
-table_id (integer), where table_id is the "id number" of the relevant lookup
table defined in RUBDAFT using the sub-command keyword TABLE and containing the arbitrary variations of
, , , and with the frequency (including a constant behavior of some of these parameters,
if any).
|
|
| If DAMPING_TYPE is set to RAYDAMP, specifies the Rayleigh damping mass coefficient (real) — that is,
the mass coefficient in the Rayleigh proportional damping matrix (real) for the material identified by MID
(see above). In a structural dynamic analysis, this value overrides for the material identified by MID any value of the
Rayleigh damping mass coefficient specified under DYNAMICS. In any analysis performed using the IMPEDANCE command,
this value overrides for the material identified by MID any value of the Rayleigh damping mass coefficient
specified under IMPEDANCE.
On the other hand, if DAMPING_TYPE is set to STRDAMP, has a different meaning that pertains to the loss
factor briefly discussed above. In this case, if the loss factor of the material identified by MID is to be
represented as a linear function of the frequency of the form (see above),
then and should be specified as such. However, if the loss factor is to be interpolated using an arbitrary
lookup table defined in SDETAFT, (see above) should be set to the negative integer value -curve_id
(integer), where curve_id is the "id number" of the relevant lookup table defined in SDETAFT using the
sub-command keyword CURVE, and should be simply ignored.
If DAMPING_TYPE is set to RUBDAMP however, then:
- If all of the parameters , , , and are frequency independent,
 . .
- Otherwise — that is, if , , , or is a frequency dependent parameter — is ignored.
|
If the element is a lumped torsional spring (eltyp = 11), a lumped
linear spring (eltyp = 12), a linear spring connector (eltyp = 21),
or a torsional spring connector (eltyp = 22), the material properties
are defined as follows.
MID Kx Ky Kz lx1 ly1 lz1 lx2 ly2 lz2 lx3 ly3 lz3 DAMPING 
|
MID
| The material id number from element attribute table.
|
Kx
| Torsional/Translational spring constant along local x-axis (float).
|
Ky
| Torsional/Translational spring constant along local y-axis (float).
|
Kz
| Torsional/Translational spring constant along local z-axis (float).
|
lx1 ly1 lz1
| The first axis of the local frame expressed in
the global frame (floats).
|
lx2 ly2 lz2
| The first axis of the local frame expressed in
the global frame (floats).
|
lx3 ly3 lz3
| The first axis of the local frame expressed in
the global frame (floats).
|
DAMPING
| Sub-command keyword for specifying the Rayleigh damping stiffness coefficient (characters).
|
|
| Rayleigh damping stiffness coefficient (real).
|
If the element is a discrete mass and inertia (type 131), the material properties are defined as follows.
MID MASS m Ixx Iyy Izz Ixy Iyz Ixz cx cy cz
|
MID
| The material ID number from the element attribute table (integer).
|
MASS
| Keyword indicating that the following data entries specify the properties of a discrete mass and inertia.
|
m
| Discrete mass (real).
|
Ixx
| Ixx component of the discrete inertia tensor (real). This tensor is defined in the element frame if one
is speficied under EFRAMES. Otherwise, it is defined in the global frame.
|
Iyy
| Iyy component of the discrete inertia tensor (real). This tensor is defined in the element frame if one
is speficied under EFRAMES. Otherwise, it is defined in the global frame.
|
Izz
| Izz component of the discrete inertia tensor (real). This tensor is defined in the element frame if one
is speficied under EFRAMES. Otherwise, it is defined in the global frame.
|
Ixy
| Ixy component of the discrete inertia tensor (real). This tensor is defined in the element frame if one
is speficied under EFRAMES. Otherwise, it is defined in the global frame.
|
Ixz
| Ixz component of the discrete inertia tensor (real). This tensor is defined in the element frame if one
is speficied under EFRAMES. Otherwise, it is defined in the global frame.
|
Iyz
| Iyz component of the discrete inertia tensor (real). This tensor is defined in the element frame if one
is speficied under EFRAMES. Otherwise, it is defined in the global frame.
|
cx
| x component of the offset vector from the node to the center of the discrete mass (real).
|
cy
| y component of the offset vector from the node to the center of the discrete mass (real).
|
cz
| z component of the offset vector from the node to the center of the discrete mass (real).
|
If the element is a Timoshenko beam (eltyp = 7), the material properties are defined as follows.
MID
| The material id number from element attribute table.
|
A
| Cross sectional area (float).
|
E
| Young's Modulus (float).
|
|
| Poisson's ratio (float).
|
|
| Mass density per unit volume (float).
|

| Shear deflection constant associated with  (float). This shear deflection constant is defined as the ratio of
the cross-sectional area and the effective shear area associated with
the local axis
specified in EFRAMES. This effective shear area is defined in chapter 12 of Timoshenko and Goodier, “Theory of Elasticity”.
Note that this shear deflection constant is the inverse of the shear
coefficient
defined in
https://en.wikipedia.org/wiki/Timoshenko_beam_theory#Shear_coefficient
and used by other finite element codes such as NASTRAN.
(float). This shear deflection constant is defined as the ratio of
the cross-sectional area and the effective shear area associated with
the local axis
specified in EFRAMES. This effective shear area is defined in chapter 12 of Timoshenko and Goodier, “Theory of Elasticity”.
Note that this shear deflection constant is the inverse of the shear
coefficient
defined in
https://en.wikipedia.org/wiki/Timoshenko_beam_theory#Shear_coefficient
and used by other finite element codes such as NASTRAN.
|

| Shear deflection constant associated with  (float). This shear deflection constant is defined as the ratio of
the cross-sectional area and the effective shear area associated with
the local axis
specified in EFRAMES. This effective shear area is defined in chapter 12 of Timoshenko and Goodier, “Theory of Elasticity”.
Note that this shear deflection constant is the inverse of the shear
coefficient
defined in
https://en.wikipedia.org/wiki/Timoshenko_beam_theory#Shear_coefficient
and used by other finite element codes such as NASTRAN.
(float). This shear deflection constant is defined as the ratio of
the cross-sectional area and the effective shear area associated with
the local axis
specified in EFRAMES. This effective shear area is defined in chapter 12 of Timoshenko and Goodier, “Theory of Elasticity”.
Note that this shear deflection constant is the inverse of the shear
coefficient
defined in
https://en.wikipedia.org/wiki/Timoshenko_beam_theory#Shear_coefficient
and used by other finite element codes such as NASTRAN.
|
C1
| Non-uniform torsion constant (float).
|
P
| Not Applicable
|
Ta
| Not Applicable
|
| Not Applicable
|
|
| Not Applicable
|
Ixx
| Cross-sectional moment of inertia about the local and centroidal x-axis
|
Iyy
| Cross-sectional moment of inertia about the local and centroidal principal y-axis.
|
Izz
| Cross-sectional moment of inertia about the local and centroidal principal z-axis.
|
ymin
| Negative local y-coordinate of the bottom fiber of a beam cross section.
|
ymax
| Positive local y-coordinate of the top fiber of a beam cross section.
|
zmin
| Negative local z-coordinate of the top fiber of a beam cross section.
|
zmax
| Positive local z-coordinate of the top fiber of a beam cross section.
|
DAMPING_TYPE
| Optional sub-command keyword to specify a type of damping (characters). Two options are currently available:
|
RAYDAMP
| This option specifies a Rayleigh proportional type of damping for structural dynamic (see DYNAMICS) or frequency response (see IMPEDANCE) analysis
(see above for further details).
|
STRDAMP
| This option specifies a structural type of damping for frequency response analysis (see IMPEDANCE) (see above for further details).
|
|
| If DAMPING_TYPE is set to RAYDAMP, specifies the Rayleigh damping stiffness coefficient (real).
On the other hand, if DAMPING_TYPE is set to STRDAMP, then:
- If the loss factor of the material identified by
MID is to be represented as a linear function of the frequency
of the form (see above), then and should be specified as such.
- However, if the loss factor is to be interpolated using an arbitrary lookup table
defined in SDETAFT, should be set to the negative integer value
-curve_id (integer), where curve_id
is the "id number" of the relevant lookup table defined in SDETAFT using the sub-command keyword CURVE.
In that case, (see below) should be simply ignored.
|
|
| If DAMPING_TYPE is set to RAYDAMP, specifies the Rayleigh damping mass coefficient (real).
On the other hand, if DAMPING_TYPE is set to STRDAMP, then:
- If the loss factor of the material identified by
MID is to be represented as a linear function of the frequency
of the form (see above), then and should be specified as such.
- However, if the loss factor is to be interpolated using an arbitrary lookup table defined in SDETAFT,
(see above) should be set to the negative integer value
-curve_id (integer), where curve_id is the
"id number" of the relevant lookup table defined in SDETAFT using the sub-command keyword CURVE, and
should be simply ignored.
|
If the element is a rigid translational or rotational link (eltyp = 68 or 69), the material properties
are defined as follows.
|
MID x y z dum dum dum dum dum dum dum dum dum dum dum dum dum dum dum
|
MID
| The material id number from element attribute table.
|
x
| Any nonzero value implies a rigid motion in this direction (float).
|
y
| Any nonzero value implies a rigid motion in this direction (float).
|
z
| Any nonzero value implies a rigid motion in this direction (float).
|
dum
| Any dummy value (float).
|
If the element is a constraint function element (type = 77, 78, 79, 177, 178, 179), the method for enforcing the associated
constraints (see CONSTRAINTS) can be specified as follows.
MID CONMAT [CONSTRAINT_METHOD] [MODE] [mode_v]
|
MID
| The material ID number from the element attribute table (integer).
|
CONMAT
| Keyword indicating that the following data entries specify the method chosen for enforcing the constraints associated
with the joint, rigid, or constraint function elements sharing the material id number MID (characters).
|
MODE
| Optional sub-command keyword to specify whether a constraint is of the equality or inequality type (characters).
|
mode_v
| Setting this parameter to 0, which is its default value, specifies that the contraint CONSTRAINT# is of the equality
type. Setting it to 1 specifies that it is of the inequality type (integer).
|
CONSTRAINT_METHOD
| Optional parameter which
specifies the method for enforcing the constraints associated with the
joint, rigid, or constraint function elements sharing the material ID
number MID
(characters or characters and real). The default method is set in CONSTRAINTS and used whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
elimination
| The elimination method.
|
penalty beta
| The penalty method. The real-valued parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
augmented beta
| The augmented Lagrangian method. The real-valued parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
If the element is a joint (eltyp = 119, 120, 121, 122, 123, 124, 125, or 127),
rigid (eltyp = 65, 66, 67, 68, 69, 70, 71, 73, 74, or 76), or constraint function element (eltyp = 77, 78, 79, 177, 178, 179),
the method for enforcing the associated constraints (see CONSTRAINTS) and any applicable mass property can be
specified as follows.
MID CONMAT [CONSTRAINT_METHOD] [MASS DENSITY [GEOPARA]]
|
MID
| The material id number from element attribute table.
|
CONMAT
| Keyword indicating that the
following data entries specify the method chosen for enforcing the
constraints associated with the joint, rigid, or constraint function
elements sharing the material
id number MID (characters).
|
CONSTRAINT_METHOD
| Optional parameter which
specifies the method for enforcing the constraints associated with the
joint, rigid, or constraint function elements sharing the material id
number MID (characters or characters and real).
The default method is set in CONSTRAINTS and used whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
elimination
| The elimination method.
|
penalty beta
| The penalty method. The real-valued parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
augmented beta
| The augmented Lagrangian method. The real-valued parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
MASS
| Optional keyword indicating that the rigid elements with eltyp = 65, 66, 70, 73, or 76 sharing the material id number MID are to be attributed an element level (lumped or consistent) mass matrix computed as in the case of flexible elements,
using the following data entries (characters).
|
DENSITY
| Optional parameter which
specifies the density for the rigid elements with eltyp = 65, 66, 70,
73, or 76 sharing the material id number MID (real).
|
GEOPARA
| Optional parameter which
specifies the cross sectional area for those rigid truss (eltyp = 65)
and beam (eltyp = 66) elements, or the thickness for those rigid shell
(eltyp = 73 or 76) elements sharing the material id number MID (real).
|
If the element is a nonlinear spring (eltyp = 200, 201, 202, 203, 204,
or 205), the definition of its material properties can be specified as
follows.
|
MID SPRINGMAT k [FREEPLAY] [freeplay_ul]
|
MID
| The material id number from element attribute table.
|
SPRINGMAT
| Keyword indicating that the
following data entry specifies the stiffness constant of the nonlinear
spring elements sharing the material id number MID (characters).
|
k
| Stiffness constant of the nonlinear spring elements sharing the material id number MID (real).
|
FREEPLAY
| Optional keyword indicating that
the following data entry specifies the freeplay parameter for the
spring elements of type 203, 204, or 205 sharing the material ID number MID
(characters). For each such spring element, freeplay is modeled using this parameter as follows:


where is the stiffness coefficient k of the spring, and  is its displacement. In a linear dynamic analysis, the
freeplay-induced forces and moments are interpreted as
configuration-dependent
and automatically treated as piecewise constant (see
is its displacement. In a linear dynamic analysis, the
freeplay-induced forces and moments are interpreted as
configuration-dependent
and automatically treated as piecewise constant (see PIECEWISE in STATICS).
|
freeplay_ul
| Freeplay upper displacement limit which should be specified in the unit of length chosen for the computational model.
|
If the element is a joint spring combination (eltyp = 220, 221, 222,
223, 225, 227, or 323), the definition of its material properties and
the method for enforcing the associated constraints (see CONSTRAINTS) can be specified as follows.
|
MID CONMAT [CONSTRAINT_METHOD] SPRINGMAT k1 k2 k3 FREEPLAY freeplay_ll1 freeplay_ul1 factor_lz1 factor_dz1 factor_uz1 freeplay_ll2 freeplay_ul2 factor_lz2 factor_dz2 factor_uz2 freeplay_ll3 freeplay_ul3 factor_lz3 factor_dz3 factor_uz3
|
MID
| The material id number from element attribute table.
|
CONMAT
| Keyword indicating that the
following data entries specify the method chosen for enforcing the
constraints associated with the joint spring combination elements
sharing the material id number MID (characters).
|
CONSTRAINT_METHOD
| Optional parameter which
specifies the method for enforcing the constraints associated with the
joint spring combination elements sharing the material id number MID (characters or characters and real).
The default method is set in CONSTRAINTS and used whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
elimination
| The elimination method.
|
penalty beta
| The penalty method. The real-valued parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
augmented beta
| The augmented Lagrangian method. The real-valued parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
SPRINGMAT
| Keyword indicating that the
following data entry specifies the stiffness coefficient of the joint
spring combination elements sharing the material ID number MID (characters).
|
k1 k2 k3
| Stiffness constants of the joint spring combination elements sharing the material ID number MID (real). More specifically k1 is the stiffness of the first embedded spring,
k2 that of the second embedded spring when applicable, and k3 that of the third embedded spring when applicable.
|
FREEPLAY
| Keyword indicating that the
following data entries specify the freeplay parameters for the springs
embedded in the joint spring combination elements sharing the material
ID number MID
(characters). For each embedded spring (i = 1, 2, or 3), freeplay is modeled using 5 parameters:
Note however that:
- Currently, freeplay is supported only for the element type 323 which has a single embedded spring with a stiffness coefficient
k1.
- In a linear dynamic analysis, the freeplay-induced forces
and moments are interpreted as configuration-dependent and
automatically treated as piecewise constant (see
PIECEWISE in STATICS).
|
freeplay_ll1 (freeplay_ll2, or freeplay_ll3)
| Freeplay deflection lower limit
for the first (second, or third) embedded spring. For a torsional
spring, the deflection corresponds to the rotation associated with this
spring, in which case this parameter should be specified in
radians. For a translational spring, the deflection corresponds
to the displacement associated with this spring, in which case
this parameter should be specified in the unit of length chosen for the
computational model.
|
freeplay_ul1 (freeplay_ul2, or freeplay_ul3)
| Freeplay deflection upper limit
for the first (second, or third) embedded spring. For a torsional
spring, the deflection corresponds to the rotation associated with this
spring, in which case this parameter should be specified in
radians (real). For a translational spring, the deflection corresponds
to the displacement associated with this spring, in which case
this parameter should be specified in the unit of length chosen for the
computational model.
|
factor_lz1 (factor_lz2, or factor_lz3)
| Freeplay correction factor for the stiffness coefficient k1 (k2, or k3) for  ( (  , or , or
 ), where the deflection ), where the deflection  ( (  , or , or  ) is a rotation in the case of a rotational spring, and a displacement in the case of a
translational spring. ) is a rotation in the case of a rotational spring, and a displacement in the case of a
translational spring.
|
factor_dz1 (factor_dz2, or factor_dz3)
| Freeplay correction factor for the stiffness coefficient k1 (k2, or k3) for  (
(  , or , or  ), where the deflection ( , or ) is
a rotation in the case of a rotational spring, and a displacement in the case of a translational spring. ), where the deflection ( , or ) is
a rotation in the case of a rotational spring, and a displacement in the case of a translational spring.
|
factor_uz1 (factor_uz2, or factor_uz3)
| Freeplay correction factor for the stiffness coefficient k1 (k2, or k3) for  ( (  ,
or ,
or  ), where the deflection ( , or ) is a rotation in the case of a rotational spring, and a displacement in the case of
a translational spring. ), where the deflection ( , or ) is a rotation in the case of a rotational spring, and a displacement in the case of
a translational spring.
|
If the element is a revolute joint-with-driver element (eltyp = 126), or
a revolute joint-with-actuator element (eltyp = 226),
or a prismatic joint-with-driver element (eltyp = 134), or a prismatic
joint-with-actuator element (eltyp = 234), its description
includes the prescription of the relative rotation (eltyp = 126), applied moment (eltyp = 226), relative displacement (eltyp = 134), applied force
(eltyp = 234), in the form  =
= SCALE_FACTOR*  +
+ SHIFT (eltyp = 126, 134, 226, 234), where SCALE_FACTOR is an amplification factor and
is a time-dependent function governed by FUNCTION_TYPE and up to four parameters , , , and . The properties of these four elements can be specified as follows.
MID CONMAT [CONSTRAINT_METHOD] FUNCTION_TYPE SCALE_FACTOR SHIFT SPRINGMAT
|
MID
| The material id number from element attribute table.
|
CONMAT
| Keyword indicating that the
following data entries specify the method chosen for enforcing the
constraints
also fixed the items belowassociated with the revolute or
primsatic joint-with-driver or joint-with-actuator elements sharing the
material id
number MID (characters).
|
CONSTRAINT_METHOD
| Optional parameter which specifies the method for enforcing the constraints associated with the revolute or prismatic
joint-with-driver or joint-with-actuator elements sharing the material id number MID (character or characters and real).
The default method is set in CONSTRAINTS and used whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
elimination
| The elimination method.
|
penalty beta
| The penalty method. The real-valued parameter beta should be a large positive number, typically of the order
of (no default value is provided).
|
augmented beta
| The augmented Lagrangian method. The real-valued parameter beta should be a large positive number, typically
of the order of (no default value is provided).
|
FUNCTION_TYPE
| Type of the relative
rotation/applied moment/relative translation/applied force prescribed by
the revolute
joint-with-driver/revolute joint-with-actuator/prismatic
joint-with-driver/prismatic joint-with-actuator elements sharing the
material id number MID (characters). There are five types to choose from:
|
SINE
| Sets  / /  / /  / /  to a sinusoidal relative rotation/applied moment/relative translation/applied force partially described
by to a sinusoidal relative rotation/applied moment/relative translation/applied force partially described
by  , where and are two parameters specified below. , where and are two parameters specified below.
|
RAMP
| Sets / / / to a time-dependent relative rotation/applied moment/relative translation/applied force partially
described by a bounded ramp function of the form
 where and are two parameters specified below.
where and are two parameters specified below.
|
TRIA
| Sets / / / to a time-dependent relative rotation/applied moment/relative translation/applied force partially
described by a triangular (hat) function of the form
 where , and are three parameters specified below.
where , and are three parameters specified below.
|
TRAP
| Sets  / / to a time-dependent relative rotation/applied moment/relative translation/applied force partially
described by a trapezoidal function of the form / / to a time-dependent relative rotation/applied moment/relative translation/applied force partially
described by a trapezoidal function of the form
 where , , and are four parameters specified below.
where , , and are four parameters specified below.
|
SSHA
| Sets / / / to a time-dependent relative rotation/applied moment/relative translation/applied force partially
described by an S-shaped function of the form
 where , and are three parameters specified below.
where , and are three parameters specified below.
|
SCALE_FACTOR
| Constant amplification factor (real).
|
SHIFT
| Constant shift (real).
|
|
| Time parameter (real).
|
|
| Time parameter (real).
|
|
| Time parameter (real).
|
|
| Time parameter (real).
|
SPRINGMAT
| Keyword indicating that the following data entry specifies the stiffness constant of the revolute or prismatic
joint-with-actuator elements sharing the material id number MID (characters).
|
|
| Stiffness constant of the revolute or prismatic joint-with-actuator elements sharing the material id number MID
(real).
|
If the element is a thermal element (eltyp = 3, 10, 46–51, 53, 56–58,
81–86, 4646), the material properties are defined as follows.
MID
| The material id number from element attribute table.
|
THRMAT
| keyword that specifies that the following data entries are associated with thermal elements.
|
A
| Cross sectional area for lineal thermal elements (float).
|
| Mass density per unit volume (float).
|
| Specific heat coefficient (float).
|
h/
| Heat convection coefficient for a
heat convection or bulk fluid thermal element, or transfer factor for a
heat radiation element (float). When radiation is exchanged
between two bodies  (identified here by this value of (identified here by this value of MID) and  (any other body), the transfer factor (any other body), the transfer factor  depends on the emittances
of both bodies as well as the geometrical view. In the special
case of a gray object in a large environment — that is, when represents a smaller body
and a larger isothermal environment (for example, the atmosphere at some temperature) — becomes the emissivity
depends on the emittances
of both bodies as well as the geometrical view. In the special
case of a gray object in a large environment — that is, when represents a smaller body
and a larger isothermal environment (for example, the atmosphere at some temperature) — becomes the emissivity  of the first
body. In this case, of the first
body. In this case,  if is furthermore a black body. if is furthermore a black body.
|
|
| Stefan's constant, also known as the Stefan-Boltzmann constant (in SI units,  Js Js  m m  K K  ) (float). ) (float).
|
k
| Heat conduction coefficient (float).
|
t
| Thickness of a (two-dimensional) thermal element (float).
|
P
| Perimeter/circumference area for thermal elements (float), or depth of the boundary where convection (radiation)
occurs when element type 47 (56) is used to model non-lateral boundary convection (radiation) (float).
|
Tr
| For a heat radiation element, reference temperature of the enclosure receiving the radiation (float).
|
If the element is an acoustic element (eltyp = 31–45, 63, 90, 93–96, 98–108), the material properties may be defined as follows.
|
MID AMAT
|
or
or
or
MID
| The material id number from element attribute table.
|
AMAT
| Keyword that specifies that the following data entries are associated with acoustic fluid elements.
|
| Speed of sound in the material identified by MID (float).
|

| Real part of the speed of sound in the material identified by MID (float).
|

| Imaginary part of the speed of sound in the material identified by MID (float).
|
| Density (mass per unit volume) of the material identified by MID (float).
|
pml_type
| Type of PML (Perfectly Matched Layer) (integer).
|
| | pml_type = 1 designates a box PML. In this case the PML elements are assumed to be in the region defined by pmlx1 < x < pmlx2, -pmlx2 < x < -pmlx1, pmly1 < y < pmly2, -pmly2 < y < -pmly1, pmlz1 < z < pmlz2, and -pmlz2 < z < -pmlz1.
|
| | pml_type = 2 designates a spherical PML. In this case the PML elements are assumed to be in the region defined by pmlx1 < r < pmlx2, where r = sqrt(x*x+y*y+z*z).
|
| | pml_type = 3 designates a cylindrical PML. In this case the PML elements are assumed to be in the region defined by pmlx1 < r < pmlx2, where r = sqrt(x*x+y*y), pmlz1 < z < pmlz2, and -pmlz2 < z < -pmlz1.
|
| PML attenuation parameter (real). Given the speed of sound specified above, the circular frequency  where is the frequency
specified in IMPEDANCE — and therefore the wavenumber where is the frequency
specified in IMPEDANCE — and therefore the wavenumber  — the thickness of the PML layer — the thickness of the PML layer  , and this attenuation parameter ,
the PML damps the outgoing waves by the factor , and this attenuation parameter ,
the PML damps the outgoing waves by the factor  where where  .
The recommended value for is .
The recommended value for is  . Note that the mesh within the PML must be designed so that it
properly resolves the decaying solution.
To this effect, also note that in practice, using two cubic
elements through the thickness of the PML is sufficient to resolve a
decaying solution characterized by
a damping factor
. Note that the mesh within the PML must be designed so that it
properly resolves the decaying solution.
To this effect, also note that in practice, using two cubic
elements through the thickness of the PML is sufficient to resolve a
decaying solution characterized by
a damping factor  — that is, a solution that decays exponentially within the PML, from a relative amplitude of 1 to a relative amplitude
of 0.001. — that is, a solution that decays exponentially within the PML, from a relative amplitude of 1 to a relative amplitude
of 0.001.
|
pmlx1
| PML geometrical parameter (see above) (real).
|
pmlx2
| PML geometrical parameter (see above) (real).
|
pmly1
| PML geometrical parameter (see above) (real).
|
pmly2
| PML geometrical parameter (see above) (real).
|
pmlz1
| PML geometrical parameter (see above) (real).
|
pmlz2
| PML geometrical parameter (see above) (real).
|
If the element is a fabric truss element (eltyp = 111), the material properties are defined as follows
(see Powell, D.A. and Zohdi, T.I. Attachment mode performance of network-modeled ballistic fabric shielding. Composites: Part B 2009; 40: 451-460).
MID
| The material id number from element attribute table (integer).
|
FABMAT
| Keyword specifying that the following data entries are associated with fabric elements (characters).
|
type
| Type of fabric material (integer). If type = 1, the fabric properties are automatically determined by AERO-S using a micro-scale computation. If type = 2,
they are determined using Gaussian distribution.
|
E
| If type = 1, this is Young's modulus for the fibrils that make up the yarn (float). If type = 2, it is the mean value of Young's modulus for the yarn.
|
| Mass density per unit volume of the fibril/yarn (float).
|
A
| Cross sectional area of the entire yarn element (float).
|

| If type = 1, this is the breaking stretch (  ) of the fibrils (float). If ) of the fibrils (float). If type = 2, it is the stretch level at which the yarn begins to damage.
|

| Stretch level at which the entire yarn has failed (i.e. the stress response is approximately zero) (float).
|
| If type = 1, this
is the initial guess for the parameter controlling the damage rate of
the yarn; its actual value is positive and determined by Newton's method
(float).
If type = 2, it is the slope of the assumed linear variation of the damage parameter with Young's modulus.
|
h
| If type = 1, this is the length of an unstretched yarn (initial length of the truss element) (float). If type = 2, it is the value of the damage parameter for a zero Young's modulus.
|
d
| If type = 1, this is the standard deviation for the inclination distance of the fibrils (misalignment of the fibrils) (float). If type = 2, it is the standard deviation associated
with the assumed Gaussian distribution of Young's modulus.
|

| If type = 1, this parameter is set to 0 and ignored (float). If type = 2, it is the standard deviation associated with the assumed Gaussian distribution of the damage parameter.
|

| If type = 1, this is the maximum number of Newton iterations for fitting the damage parameter to micro-scale data (integer). If type = 2, this parameter is ignored.
|

| If type = 1, this is the number of fibers in a typical yarn (integer). If type = 2, this parameter is ignored.
|
83 LINEAR MULTIPOINT CONSTRAINTS FOR MECHANICAL ANALYSIS
The LMPC command can be used to specify a set of linear multipoint constraint equations for an otherwise
linear or nonlinear (see NONLINEAR) analysis. These constraints equations can be of the form

or
where is a constant coefficient and  denotes a degree of freedom of the structural model.
There is no limitation on the number of multipoint constraints, or number of degrees of freedom
related by the same constraint equation.
denotes a degree of freedom of the structural model.
There is no limitation on the number of multipoint constraints, or number of degrees of freedom
related by the same constraint equation.
Note 1: All degrees of freedom referred to by this command are defined in the nodal degree of freedom reference frames defined
at the nodes where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal degree of
freedom reference frames are the same as the global reference frame.
Note 2: Whereas the constraints specified under this command must be linear, the degrees of freedom
can be governed by
nonlinear equations of equilibrium. Therefore, this command is also
supported for linear analysis with geometric stiffening due to
prestress (see GEPS), and NONLINEAR analysis. It is noted however that for linear analysis using GEPS, linear
multipoint constraints involving rotational degrees of freedom may be violated by the solution computed by AERO-S
if the initial displacement field underlying the prestress contains large rotations.
Note 3: The Lagrange multiplier method for enforcing the constraints associated with this command is supported only by the
FETI-DP family of iterative solvers, the GMRES solver, and the sparse direct solvers SPOOLES and MUMPS (with pivoting enabled),
and in all but explicit dynamic analyses (see STATICS).
Note 4: For time-dependent problems, the specified initial conditions must verify the specified linear multipoint constraints.
The format of this command statement is as follows.
CONSTRAINT# | RHS | [MODE] | [mode_v] | CONSTRAINT_METHOD
| NODE# | DOF# | COEFF
| | . | |
| | . | |
| NODE# | DOF# | COEFF
|
|
CONSTRAINT#
| This corresponds to the constraint equation number i (integer).
|
RHS
| This is the right-hand side of the i-th constraint equation (real).
|
MODE
| Optional sub-command keyword to specify whether a constraint is of the equality or inequality type (characters).
|
mode_v
| Setting this parameter to 0, which is its default value, specifies that the contraint CONSTRAINT# is of the equality
type. Setting it to 1 specifies that it is of the inequality type (integer).
|
CONSTRAINT_METHOD
| This is the method for enforcing the constraint (characters). The default method is set in CONSTRAINTS and used
whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
elimination
| The elimination method.
|
penalty [beta]
| The penalty method. The parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
NODE#
| This is the number of the node contributing the coefficient of the i-th constraint equation (integer).
|
DOF#
| This is the local number of the degree of freedom at the node specified above contributing the coefficient of
the i-th constraint equation (integer).
|
COEFF
| This is the coefficient of the i-th constraint equation (real).
|
84 LOAD
The LOAD command statement is used to inform AERO-S where
the user defined subroutines for user defined forces and/or displacements
and/or control are located. An example input file using the LOAD
command can be found in FEM.d/fem_examples/Control.d
pathandfilename
| Specifies between quotes “ ” the path and filename of the LOAD file. The extension of this file must be “.so”.
|
85 LOADCASE DEFINITION
Command Statement: LOADCASE [LOADCASE_ID]
|
The LOADCASE command can be used to define one or
more "load" cases. Each "load" case is defined as a linear combination
of "load" sets.
Defining no "load" case is equivalent to defining a load case 0 which
combines the "load" set 0 and all "loads" generated by the commands
which
do not support the "load" set construct (LOADSET_ID). Note also that any "load" generated by a command which does not support the "load"
set construct (LOADSET_ID) is automatically added to every "load" case defined herein.
The input format of this command is given below.
LOADSET_ID_1 COEFF_1
. .
. .
. .
LOADSET_ID_n COEFF_n
|
LOADCASE_ID
| Optional non-negative integer
which uniquely identifies a "load" case. The default value is 0. For
static analysis, multiple "load" cases can be defined by repeating this
command in the same
input file using different values for LOADCASE_ID and different data. For dynamic analysis, only one "load" case can be defined and must be attributed the identifier 0.
|
LOADSET_ID_1
| Integer identifying a "load" set.
|
COEFF_1
| For static and dynamic analyses, this parameter is a real coefficient that can be used to amplify the "load" set identified by LOADSET_ID_1 (real). For dynamic analysis, this parameter
can also consist of the keyword MFTT or HFTT followed by an integer identifying a TABLE_ID defined in MFTT or HFTT. In this case, the amplification factor for the
"load" set identified by LOADSET_ID_1 is the time-dependent function defined by MFTT[TABLE_ID] or HFTT[TABLE_ID].
|
86 LUMPED
|
Command Statement: LUMPED
|
By default, AERO-S computes all element mass matrices and gravity (see GRAVITY) loads by a consistent approach,
except for explicit dynamic computations (see DYNAMICS), in which case AERO-S always uses a lumped approach
for this purpose. If a consistent mass matrix is not available for a particular element (see TOPOLOGY), then AERO-S
uses in all cases a lumped mass matrix and gravity load for that element.
Alternatively, this command can be used to instruct AERO-S to compute all element mass matrices and
gravity loads by a lumping method.
87 MASS EVALUATION
The MASS command statement is used to signal that
the user would
like that the total mass of the structural system be computed. The
result is output on the screen by FEM. In addition to the total mass of
the structure, the center of gravity (cg), the center of volume, and the
closest node to the cg are also computed and printed on the screen.
88 MATERIAL LAW
|
Command Statement: MATLAW
|
The MATLAW command can be used for two different purposes:
- Specify one or several pre-defined material laws that can be:
- Linear based on linear kinematics.
- Nonlinear based on linear kinematics.
- Or nonlinear based on nonlinear kinematics.
- Define and label a material law that can fit any of the above three descriptions and is supported by a user-defined subroutine
to be linked with aeros via packaging in a library with a ".so" extension.
For this purpose, the user should also grab from AERO-S.d/Matlaw.d a special makefile
and a few include files. In this case, this command is also needed to pass to the user-defined
library the parameters it expects.
Because the MATERIAL command can be used to input the parameters of a linear elastic material law, the MATLAW and MATUSAGE commands should be used primarily for defining
and assigning nonlinear material laws. To this end, it is noted that by default, the following material law is assigned by AERO-S to an element of a computational structural model:
Note 1: To be active, this command requires the presence of the NONLINEAR
command in the same ASCII Input Command Data file (in this case, if
this command is used to
define or specify one or several material laws that are linear and based
on linear kinematics, and provided that the computational model does
not contain any other source of nonlinearity such as,
for example, a follower force, the nonlinear solution strategy specified
in NONLINEAR is guaranteed to converge in a
single iteration). Otherwise, this command and its content are ignored,
the linear elastic material law is attributed to all elements of the
computational structural model, and the properties of this material law
should be specified in MATERIAL.
Note 2: In the presence of the NONLINEAR command in the ASCII Input Command Data file, the material laws and properties specified under this command and assigned using MATUSAGE take precedence
over those inputted using MATERIAL, when a conflict arises.
Note 3: In the absence of the MATLAW command but presence of the NONLINEAR command in the ASCII Input Command Data file:
- The linear elastic material law with infinitesimal
strains is assigned by default to all beam and shell elements, and the
nonlinear geometric effects of these elements are accounted for using
the corotational method.
- The Saint Venant-Kirchhoff hyperelastic material
law is assigned by default to all 3D solid elements and the membrane
elements type 128 and 129, and the nonlinear geometric effects are
accounted for using the total Lagrangian method.
Note 4: In the absence of both NONLINEAR and MATLAW
commands in the ASCII Input Command Data file, the linear elastic
material law with infinitesimal strains is assigned by default to all
elements of the computational structural model.
Note 5: The various pre-defined material laws that can be
specified using this command are supported by different structural and
solid mechanics elements (see TOPOLOGY) as follows:
- The three-dimensional solid elements (type 17, 23, 24, 25, 72, 91, 92, and 97) support the pre-defined material laws
Linear, HenckyElastic, MooneyRivlin, NeoHookean, Ogden, StVenantKirchhoff,
BilinearPlastic, FiniteStrainPlastic, LogStrainPlastic, SimoPlastic, ViscoLinearElastic,
ViscoMooneyRivlin, ViscoNeoHookean, and ViscoStVenantKirchhoff.
- The shell elements
15 and 1515 support the pre-defined material laws J2Plasticity,
PlaneStressBilinearPlastic,
ShellFabricMap, ShellFabricMat, ShellViscoFabricMap, and ShellViscoFabricMat.
- The shell element
16 supports the pre-defined material laws HypoElastic, J2Plasticity, KK1, and
KK2.
- The membrane elements
128 and 129 support the pre-defined material laws LinearPlaneStress,
HyperElasticPlaneStress,
PlaneStressMooneyRivlin, PlaneStressNeoHookean,
PlaneStressBilinearPlastic, PlaneStressFiniteStrainPlastic,
ViscoHyperElasticPlaneStress, ViscoLinearPlaneStress, PlaneStressViscoMooneyRivlin, PlaneStressViscoNeoHookean,
FabricMap, FabricMat, ViscoFabricMap, and ViscoFabricMat.
Note 6: The element deletion method is supported only for
nonlinear explicit dynamic computations. In such computations,
the mass matrix is lumped. For this reason, and because no node is
deleted when an element is deleted from the finite element model,
neither the mass matrix nor a gravity load is affected by such an event,
and mass is conserved.
Note 7: Anisotropic material laws defined using this command (including user-defined and pre-defined materials such as FabricMat, FabricMap, and TorchMat)
are typically defined using a local material frame of reference specified using the CFRAMES command.
The input format of this command is given below.
WARNING: for formatting issues pertaining to this User's Reference
Manual only, the data associated with some
pre-defined material laws has been described below on separate lines;
when preparing an AERO-S ASCII Input Command Data file however, this
data should be specified on a single line.
READ
| Sub-command keyword used to introduce a material name (characters) and associate it with the library located and stored in <pathandfilename.so> (characters) and
linked with aeros.
|
MATERIAL_ID
| ID number of the material law (integer).
|
MATERIAL_NAME
| Name of the material law (characters).
|
<pathandfilename>
| Name of the file (including
path, if needed) containing the material law library. This entry must be
specified between quotes (" "), and the file it specifies must have the
extension
.so.
|
PARA#1
| First parameter expected by the library <pathandfilename.so>.
|
PARA#N
| Last parameter expected by the library <pathandfilename.so>.
|
Linear
| Name of the pre-defined standard
linear elastic material law with linear kinematics (characters). Its
conjugate strain and stress are the
infinitesimal strain and the first Piola-Kirchhoff stress. This
material law has an anisotropic variant which can be
specified using the sub-command COEF of COMPOSITE: in this case, the constitutive matrix and coefficients
of thermal expansion are defined using the information inputted under COEF, and the parameters
, , , and inputted under this command are ignored.
|
LinearPlaneStress
| Name of the pre-defined material law that is the plane stress counterpart of the linear elastic material law Linear described above (characters).
|
HyperElasticPlaneStress
| Name of the pre-defined finite strain hyperelastic material law that is the plane stress counterpart of the material law StVenantKirchhoff described above (characters).
|
HenckyElastic
| Name of another pre-defined finite strain hyperelastic material law (appropriate for larger strains) (characters).
Its conjugate strain and stress are the Lagrangian Hencky (engineering) strain and the rotated Kirchhoff stress.
This material law has an anisotropic variant which can be
specified using the COEF sub-command of COMPOSITE, in which case the parameters , , and
inputted under this command are ignored.
|
HypoElastic
| Name of the pre-defined plane stress version of the hypoelastic material law (characters).
|
MooneyRivlin
| Name of the pre-defined compressible version of the finite strain Mooney-Rivlin hyperelastic material law (characters).
|
NeoHookean
| Name of the pre-defined compressible version of the finite strain hyperelastic material law (characters).
|
Ogden (with  only) only)
| Name of the pre-defined Ogden hyperelastic material law with 1 to 9 terms in the Ogden series that defines the strain
energy density in terms of the deviatoric principal stretches  characterizing the distorsional response, and a 1-term bulk volumetric response function
characterizing the distorsional response, and a 1-term bulk volumetric response function

Here,  denotes the determinant of the deformation gradient, denotes the determinant of the deformation gradient,  to to  and to and to  are
material properties that characterize the distorsional response of the material, and is its bulk modulus. are
material properties that characterize the distorsional response of the material, and is its bulk modulus.
|
Ogden (with and  ) )
| Name of the pre-defined Ogden hyperelastic material law with 2 to 9 terms in the Ogden series that defines the strain
energy density in terms of the deviatoric principal stretches
characterizing the distorsional response, and a 2-term bulk volumetric response function

Here, denotes the determinant of the deformation gradient, to and to are
material properties that characterize the distorsional response of the material, and and are material
properties that characterize its volumetric response.
|
StVenantKirchhoff
| Name of a pre-defined finite
strain hyperelastic material law (appropriate for metals and moderate
strains) (characters).
Its conjugate strain and stress are the Green-Lagrange
(engineering) strain – which introduces in the problem to be solved a
geometric nonlinearity – and the second Piola-Kirchhoff stress.
This material law has an anisotropic variant which can be
specified using the COEF sub-command of COMPOSITE, in which case the parameters , , and
inputted under this command are ignored.
|
BilinearPlastic
| Name of a pre-defined infinitesimal strain bilinear plastic material law featuring kinematic hardening (characters).
Its conjugate strain and stress are the infinitesimal strain and the first Piola-Kirchhoff stress.
|
FiniteStrainPlastic
| Name of a pre-defined finite
strain plastic material law featuring kinematic hardening (characters).
Its conjugate strain and stress are the Green-Lagrange
(engineering) strain – which introduces in the problem to be solved a
geometric nonlinearity – and the second Piola-Kirchhoff stress.
|
J2Plasticity
| Name of the pre-defined plane
stress version of the von Mises plasticity material law based on the
second stress invariant
featuring kinematic and/or isotropic hardening (characters). Its
conjugate strain and stress are the infinitesimal strain and
the first Piola-Kirchhoff stress.
|
KK1
| Name of the pre-defined plane
stress plasticity material law due to Korkolis and Kydiakides featuring
kinematic and/or
isotropic hardening and an advanced yield function including
deformation-induced anisotropy (characters). Its conjugate strain
and stress are the infinitesimal strain and the first
Piola-Kirchhoff stress.
|
KK2
| Name of the pre-defined plane stress plasticity material law for aluminum Al-6260-T4 due to Korkolis and Kydiakides
featuring an advanced yield function including deformation-induced anisotropy and an experimental-based stress-strain
curve (characters). Its conjugate strain and stress are the infinitesimal strain and the first Piola-Kirchhoff stress.
|
LogStrainPlastic
| Name of another pre-defined
finite strain plastic material law featuring logarithmic strains and
kinematic hardening
(characters). Its conjugate strain and stress are the Lagrangian
Hencky (engineering) strain and the rotated Kirchhoff stress.
|
SimoPlastic
| Name of a pre-defined finite strain elasto-plastic material law formulated in the logarithmic principal stretches and based on
a multiplicative decomposition of the deformation gradient (see J.
C. Simo, "Algorithms for Static and Dynamic Multiplicative Plasticity
that Preserve
the Classical Return Mapping Schemes of the Infinitesimal Theory,"
Computer Methods in Applied Mechanics and Engineering, Vol. 99, pp.
61-112 (1992))
|
ViscoLinearElastic
| Name of a pre-defined
infinitesimal strain linear elastic material law equipped with a 3-term
Prony series viscoelastic model (see, for example,
S.M. Goh, M.N. Charalambides, J.G. Williams, "Determination of the Constitutive Constants of Non-Linear Viscoelastic
Materials," Mechanics of Time-Dependent Materials, Vol. 8, pp 255-268 (2004)).
|
ViscoLinearPlaneStress
| Name of a pre-defined
infinitesimal strain plane-stress material law for membrane elements
(types 128 and 129, only), based on the material law LinearPlaneStress with a Prony series
viscoelastic model (characters).
|
ViscoHyperElasticPlaneStress
| Name of a pre-defined finite
strain plane-stress material law for membrane elements (types 128 and
129, only), based on the material law HyperElasticPlaneStress with a Prony series
viscoelastic model (characters).
|
ViscoMooneyRivlin
| Name of a pre-defined finite strain Mooney-Rivlin material law equipped with a 3-term Prony series viscoelastic model
(see, for example, S.M. Goh, M.N. Charalambides, J.G. Williams, "Determination of the Constitutive Constants of
Non-Linear Viscoelastic Materials," Mechanics of Time-Dependent Materials, Vol. 8, pp 255-268 (2004)).
|
ViscoNeoHookean
| Name of a pre-defined finite
strain Neo-Hookean material law equipped with a 3-term Prony series
viscoelastic model (see, for example,
S.M. Goh, M.N. Charalambides, J.G. Williams, "Determination of the Constitutive Constants of Non-Linear Viscoelastic
Materials," Mechanics of Time-Dependent Materials, Vol. 8, pp 255-268 (2004)).
|
ViscoStVenantKirchhoff
| Name of a pre-defined finite
strain hyperelastic material law equipped with a 3-term Prony series
viscoelastic model (see, for example,
S.M. Goh, M.N. Charalambides, J.G. Williams, "Determination
of the Constitutive Constants of Non-Linear Viscoelastic Materials,"
Mechanics of Time-Dependent Materials,
Vol. 8, pp 255-268 (2004)).
|
PlaneStressMooneyRivlin
| Name of the pre-defined material law that is the plane stress counterpart of the material law MooneyRivlin described above (characters).
It is implemented by numerically enforcing the plane-stress condition as described in S. Klinkel and S. Govindjee, "Using Finite Strain 3D-Material
Models in Beam and Shell Elements," Engineering Computations, Vol. 19, pp. 254-271 (2002), which involves solving a nonlinear equation at each Gauss point
of an element.
|
PlaneStressNeoHookean
| Name of the pre-defined material law that is the plane stress counterpart of the material law NeoHookean described above (characters).
It is implemented by numerically enforcing the plane-stress condition as described in S. Klinkel and S. Govindjee, "Using Finite Strain 3D-Material
Models in Beam and Shell Elements," Engineering Computations, Vol. 19, pp. 254-271 (2002), which involves solving a nonlinear equation at each Gauss point
of an element.
|
PlaneStressBilinearPlastic
| Name of the pre-defined material law that is the plane stress counterpart of the material law BilinearPlastic described above (characters).
It is implemented by numerically enforcing the plane-stress condition as described in S. Klinkel and S. Govindjee, "Using Finite Strain 3D-Material
Models in Beam and Shell Elements," Engineering Computations, Vol. 19, pp. 254-271 (2002), which involves solving a nonlinear equation at each Gauss point
of an element.
|
PlaneStressFiniteStrainPlastic
| Name of the pre-defined material law that is the plane stress counterpart of the material law FiniteStrainPlastic described above (characters).
It is implemented by numerically enforcing the plane-stress condition as described in S. Klinkel and S. Govindjee, "Using Finite Strain 3D-Material
Models in Beam and Shell Elements," Engineering Computations, Vol. 19, pp. 254-271 (2002), which involves solving a nonlinear equation at each Gauss point
of an element.
|
PlaneStressViscoMooneyRivlin
| Name of the pre-defined finite strain material law that is the plane stress counterpart of the material law ViscoMooneyRivlin described above (characters).
It is implemented by numerically enforcing the plane-stress condition as described in S. Klinkel and S. Govindjee, "Using Finite Strain 3D-Material
Models in Beam and Shell Elements," Engineering Computations, Vol. 19, pp. 254-271 (2002), which involves solving a nonlinear equation at each Gauss point
of an element.
|
PlaneStressViscoNeoHookean
| Name of the pre-defined finite strain material law that is the plane stress counterpart of the material law ViscoNeoHookean described above (characters).
It is implemented by numerically enforcing the plane-stress condition as described in S. Klinkel and S. Govindjee, "Using Finite Strain 3D-Material
Models in Beam and Shell Elements," Engineering Computations, Vol. 19, pp. 254-271 (2002), which involves solving a nonlinear equation at each Gauss point
of an element.
|
FabricMap
| Name of a pre-defined finite strain
plane-stress material law for membrane elements (types 128 and 129,
only) in which the stress response is given exclusively by tables
(characters). This
material law is equivalent to material 034M (MAT_FABRIC_MAP) in
LS-DYNA.
|
ShellFabricMap
| Name of a pre-defined
infinitesimal strain plane-stress material law for shell elements (types
15 and 1515, only) in which the stress response is given exclusively by
tables (characters).
This material law is equivalent to material 034M (MAT_FABRIC_MAP)
in LS-DYNA.
|
FabricMat
| Name of a pre-defined finite
strain orthotropic plane-stress material law for membrane elements
(types 128 and 129, only) in which the material Young modulii are
specified in tables
(characters). This material law is equivalent to material 034
(MAT_FABRIC) in LS-DYNA.
|
ShellFabricMat
| Name of a pre-defined
infinitesimal strain orthotropic plane-stress material law for shell
elements (types 15 and 1515, only) in which the material Young modulii
are specified in tables
(characters). This material law is equivalent to material 034
(MAT_FABRIC) in LS-DYNA.
|
ViscoFabricMap
| Name of a pre-defined finite
strain plane-stress material law for membrane elements (types 128 and
129, only), based on the material law FabricMap with a Prony series viscoelastic model
(characters).
|
ShellViscoFabricMap
| Name of a pre-defined
infinitesimal strain plane-stress material law for shell elements (types
15 and 1515, only), based on the material law ShellFabricMap with a Prony series
viscoelastic model (characters).
|
ViscoFabricMat
| Name of a pre-defined finite
strain plane-stress material law for membrane elements (types 128 and
129, only), based on the material law FabricMat with a Prony series viscoelastic model
(characters).
|
ShellViscoFabricMat
| Name of a pre-defined
infinitesimal strain plane-stress material law for shell elements (types
15 and 1515, only), based on the material law ShellFabricMat with a Prony series
viscoelastic model (characters).
|
TorchMat
| Name of a pre-defined
plane-stress material law for membrane elements (types 128 and 129,
only), in which the stress response is given by a regression artificial
neural network function
(characters). The constitutive function associated with this
material law can be written as

where is a  symmetric matrix, is the regression artificial neural network function, symmetric matrix, is the regression artificial neural network function,  is the second Piola-Kirchhoff stress tensor, is the Green-Lagrange strain,
and is a user-specified scaling factor for the outputs of the regression artificial neural network function. is the second Piola-Kirchhoff stress tensor, is the Green-Lagrange strain,
and is a user-specified scaling factor for the outputs of the regression artificial neural network function.
|
| Mass density per unit volume (real).
|
| Material Young modulus (real).
|
| Material Poisson ratio (real).
|
| Ambient (reference) temperature of the element assigned this material law (real). The default value is 0. WARNING: if this value is different
from the nodal temperature (see TEMPERATURES) of that element, it causes the generation of a thermal load even
in a pure structural analysis. This parameter can be skipped (and therefore is optional) if the parameter is simultaneously skipped (see below).
|
| Coefficient of thermal expansion
(real). The default value is 0. This parameter can be skipped (and
therefore is optional) if the parameter is simultaneously skipped (see above).
|
TulerButcher
| Optional sub-command keyword
(characters) for specifying the Tuler-Butcher brittle failure criterion
and its parameters.
When a material is subjected to dynamic loading, crack propagation
strongly depends on the strain rate, stress wave amplitude,
and the exposure time. In this case, the Tuler-Butcher failure
criterion can be used as a material brittle failure criterion. It can be
expressed as

for  , where , where  denotes the maximum principal stress, denotes the maximum principal stress,  is a specific threshold stress, is a specific threshold stress,  is time for the fracture
and is time for the fracture
and  is the stress impulse for failure. Note that this brittle damage
model degenerates to the maximum principle stress model when
is set to zero.
Specifying this sub-command keyword and inputting after it the
parameters of the Tuler-Butcher failure criterion activates the method
of element deletion during a nonlinear dynamic computation.
Specifically, the stress at a Gauss point is set in this case to
zero when the damage accumulation function described above becomes
greater than or equal to at this point. When this criterion
is met at all Gauss points of an element, this element is deleted from the finite element model.
is the stress impulse for failure. Note that this brittle damage
model degenerates to the maximum principle stress model when
is set to zero.
Specifying this sub-command keyword and inputting after it the
parameters of the Tuler-Butcher failure criterion activates the method
of element deletion during a nonlinear dynamic computation.
Specifically, the stress at a Gauss point is set in this case to
zero when the damage accumulation function described above becomes
greater than or equal to at this point. When this criterion
is met at all Gauss points of an element, this element is deleted from the finite element model.
|
| Specific threshold stress parameter of the Tuler-Butcher brittle failure criterion (real).
|

| Exponent in the damage accumulation function of the Tuler-Butcher brittle failure criterion (real).
|
| Stress impulse failure (or macroscopic fracture threshold) parameter of the Tuler-Butcher brittle failure criterion (real).
|
 ,  ,
| Coefficients of the compressible version of the Mooney-Rivlin model (real) where the strain energy density function
can be written as

and denotes the determinant of the deformation gradient and  , ,  and and  are its three invariants. are its three invariants.
|
–
| Material properties of the pre-defined hyperelastic material law named Ogden that characterize the distorsional
response of the material (real).
|
–
| Material properties of the pre-defined hyperelastic material law named Ogden that characterize the distorsional
response of the material (real).
|
| Material property (or Bulk modulus) of the pre-defined hyperelastic material law named Ogden that characterizes
the volumetric response of the material (real).
|
| Material property of the pre-defined hyperelastic material law named Ogden that characterizes the volumetric
response of the material (real).
|

| Tangent modulus (for any
material with linear hardening and requiring the explicit input of this
parameter) representing the slope of the inelastic portion of uniaxial
stress vs uniaxial
strain curve (real). Note that if a YSST curve
is specified for the material, this parameter is used only to define
the kinematic hardening modulus and the curve is used to obtain the
isotropic hardening modulus..
|

| Yield stress for the bilinear, finite strain, J2, and KK1 plastic material laws (real). If a negative integer value -INT (note the minus sign) is specified for this otherwise positive
real parameter, the yield stress is understood to be that function of the effective plastic strain that is tabulated in YSST and identified by curve_id = INT.
|
| Free-parameter of the hardening model (real): corresponds to pure kinematic hardening,  to pure isotropic hardening, and to pure isotropic hardening, and  to a combination of
kinematic and isotropic hardening. to a combination of
kinematic and isotropic hardening.
|
MAXEPS
| Effective plastic strain at
failure (default value is infinity). Specifying a finite and strictly
positive value for this parameter activates the method of element
deletion during
a nonlinear explicit dynamic computation. Specifically, the stress
at a Gauss point is set in this case to zero when the effective plastic
strain becomes greater than or equal to MAXEPS
at this point. When this criterion is met at all Gauss points of
an element, this element is deleted from the finite element model.
|
| Relative tolerance for the convergence of the nonlinear material solver at each material point (real). The default value is  . .
|
YSSFSRT-ID
| Integer ID (integer) of the yield stress scaling factor vs effective plastic strain rate curve (see YSSFSRT). Ommitting this parameter sets the default mode of computations where the yield stress scaling factor
is set to and therefore its dependence on the effective plastic strain rate is ignored.
|
| Isotropic hardening modulus for the J2 plasticity and KK1 material laws (real). Note that in theory,  , but in AERO-S, is specified directly for
these material laws. Note also that if a YSST curve is specified for the material, then this parameter is ignored. , but in AERO-S, is specified directly for
these material laws. Note also that if a YSST curve is specified for the material, then this parameter is ignored.
|

| Kinematic hardening modulus for the J2 plasticity and KK1 material laws (real). Note that in theory,  , but in AERO-S, is specified directly for
these material laws. , but in AERO-S, is specified directly for
these material laws.
|
 – 
| Characteristic amplitudes for the 3-term Prony series viscoelastic model used in the pre-defined material laws
ViscoLinearElastic, ViscoNeoHookean, and ViscoMooneyRivlin (real).
|
 – 
| Relaxation times for the 3-term Prony series viscoelastic model used in the pre-defined material laws
ViscoLinearElastic, ViscoNeoHookean, and ViscoMooneyRivlin (real).
|
| Element material thickness (real).
|
XY-SS1DT-ID
| Integer ID (integer) identifying the one-dimensional table (i.e. curve) giving the local second Piola-Kirchhoff -stress as a function of the local Green-Lagrange -strain
(see SS1DT).
|
XX-SS2DT-ID
| Integer ID (integer) identifying the two-dimensional table (i.e. surface) giving the local  -stress as a function of the local -strain and -stress as a function of the local -strain and  -strain (see SS2DT). -strain (see SS2DT).
|
YY-SS2DT-ID
| Integer ID (integer) identifying the two-dimensional table (i.e. surface) giving the local -stress as a function of the engineering local -strain and -strain (see SS2DT).
|
XX-YMST-ID
| Integer ID (integer) identifying the one-dimensional table (i.e. curve) giving the material Young modulus  as a function of the local -strain (see YMST). as a function of the local -strain (see YMST).
|
YY-YMST-ID
| Integer ID (integer) of the one-dimensional table (i.e. curve) giving the material Young modulus  as a function of the local -strain (see YMST). as a function of the local -strain (see YMST).
|

| Material shear modulus (real).
|

| Material Poisson ratio (real).
|

| Material Poisson ratio (real).
|
module
| Path and filename of a PyTorch module encoding the regression artificial neural network function underlying the material law TorchMat (characters).
|
| Scaling factor for the outputs of the regression artificial neural network function underlying the material law TorchMat (float). It can be used, for example, to allow using
different systems of units for the the second Piola-Kirchhoff stress tensor when training offline the regression artificial neural network and exploiting it online in the constitutive
model shown above, in which case should be set to the appropriate unit conversion factor. The default value is .
|

| Scaling factor for the component of the input of the regression artificial neural network function underlying the material law TorchMat(float).
For consistency, this factor
must be the same as that used during the offline training of the
regression artificial neural network for the purpose of optimal
convergence.
|

| Scaling factor for the component of the input of the regression artificial neural network function underlying the material law TorchMat(float).
For consistency, this factor
must be the same as that used during the offline training of the
regression artificial neural network for the purpose of optimal
convergence.
|

| Scaling factor for the  component of the input of the regression artificial neural network function underlying the material law component of the input of the regression artificial neural network function underlying the material law TorchMat(float).
For consistency, this factor
must be the same as that used during the offline training of the
regression artificial neural network for the purpose of optimal
convergence.
|
| Coefficient located at the -th row and -th column of the matrix defining the linear term of the regression artificial neural network function underlying the material law
TorchMat (see above), =  , = (float). The default value is , = (float). The default value is  . When a non-zero matrix is specified, the regression artificial neural
network function can be interpreted as a correction to a linear stress-strain model (see above). . When a non-zero matrix is specified, the regression artificial neural
network function can be interpreted as a correction to a linear stress-strain model (see above).
|

| -th coordinate of a strain-space bounding box used by the material law TorchMat
as follows (float). The contribution of the regression artificial
neural network function to the
linear stress-strain model (see above) is added only when the
components of the strain tensor satisfy the following conditions:

The default values are as follows:  , ,  ; and ; and  , ,  . .
|
89 MATERIAL LAW USAGE
|
Command Statement: MATUSAGE
|
The MATUSAGE command can be used to assign a material law specified under MATLAW to one or several elements.
Note 1: Because the MATERIAL command is used to input the parameters of the linear elastic material law, the MATLAW and MATUSAGE
commands should
be used primarily for defining and assigning nonlinear material laws. To
this end, it is noted that by default, the following material law is
assigned by AERO-S to an element of a
computational structural model:
- For a bar, beam, or shell element, the linear elastic material
law. In this case, the elastic properties of this material law should
be specified in MATERIAL, for the material ID of the
aforementioned element. In the presence of the NONLINEAR command in the ASCII Input Command Data file, the geometrically nonlinear formulation of the internal force vector and tangent
stiffness matrix is activated using the corotational approach.
- For a 3D solid element or a membrane element type 128 or 129:
- In the absence of the NONLINEAR
command in the ASCII Input Command Data file, the linear elastic
material law. Again, the elastic properties of this material law should
be specified
in this case in MATERIAL, for the material ID of the aforementioned element.
- In the presence of the NONLINEAR
command in the ASCII Input Command Data file, the Saint
Venant-Kirchhoff hyperelastic law. In this case, the Young modulus and
Poisson ratio
should be specified in MATERIAL for the material ID of the aforementioned element (see MATLAW for further details); and the geometrically nonlinear formulation of the
internal force vector and tangent stiffness matrix is activated using the total Lagrangian method.
Note 2: To be active, this command requires the presence of the NONLINEAR command in the same ASCII Input Command Data file (in this case, if this command is used to assign one or several material
laws defined in MATLAW that are linear and based
on linear kinematics, and provided that the computational model does not
contain any other source of nonlinearity such as, for example, a
follower force,
the nonlinear solution strategy specified in NONLINEAR
is guaranteed to converge in a single iteration). Otherwise, this
command is ignored, the linear elastic material law is assigned to all
elements of
the computational structural model, and the properties of this material
law should be set in MATERIAL.
Note 3: In the presence of the NONLINEAR command in the ASCII Input Command Data file, the material laws and properties specified under the MATLAW command and assigned using this command
take precedence over those inputted using MATERIAL, when a conflict arises.
Note 4: In the absence of the MATLAW command but presence of the command NONLINEAR in the ASCII Input Command Data file:
- The linear elastic material law with infinitesimal
strains is assigned by default to all beam and shell elements, and the
nonlinear geometric effects of these elements are accounted for using
the corotational method.
- The Saint Venant-Kirchhoff hyperelastic material
law is assigned by default to all 3D solid elements and the membrane
elements type 128 and 129, and the nonlinear geometric effects are
accounted for using the total Lagrangian method.
Note 5: In the absence of both the NONLINEAR and MATLAW
commands in the ASCII Input Command Data file, the linear elastic
material law with infinitesimal strains is assigned by default to all
elements of the computational structural model.
The input format of this command is given below.
or
STARTING_ELEMENT# ENDING_ELEMENT# MATLAW_LABEL#
|
ELEMENT#
| Element number whose material law number is to be specified (integer).
|
MATLAW_LABEL
| Material law identification number (integer).
|
MATERIAL_LABEL
| First element of a sequence of elements that have the same MATLAW_LABEL (integer).
|
MATERIAL_NAME
| Last element of a sequence of elements that have the same MATLAW_LABEL (integer).
|
90 MESH DECOMPOSITION
|
Command Statement: DECOMPOSE
|
The command DECOMPOSE can be used to perform an
element-based mesh partitioning (or domain decomposition) of the
computational domain, and exit or continue with a finite element
analysis. For this purpose, four different mesh partitioning strategies
suitable for different objectives are available:
- STRAT1, which is a trivial, one-step strategy intended for parallel element sampling (see RMSHC). This strategy partitions the given mesh as follows:
- Let
NELES denote the number of elements in the mesh of interest, and let NSUBS denote the desired
number of subdomains. If NELES%NSUBS = 0, then elements 1 to NELES/NSUBS are assigned to
subdomain 1, elements NELES/NSUB + 1 to 2NELES/NSUBS are assigned to subdomain 2, ...
Because AERO-S allows gaps in the element numbering, element 1 refers here to the element of the mesh
with the lowest ID number, element 2 to that with the second lowest ID number, ...
- If
NELES%NSUBS > 0 however, the first NELES%NSUBS subdomains get each
one more element.
It should be noted that:
- This mesh partitioning strategy is not suitable for the iterative FETI solvers (see STATICS).
- For applications where the finite element model contains
multiple disconnected components, it allows a subdomain to contain
elements from different components.
- It delivers subdomains that are as close as possible to uniform in size, where size refers here to the number of
elements of a subdomain. Hence, this strategy does not account for the WEIGHTS of the elements of the mesh.
- It guarantees that the generated mesh partition contains exactly the requested number of subdomains,
NSUBS.
- STRAT2, which is a two-step strategy intended for the family of domain-decomposition-based iterative FETI solvers (see STATICS).
In the first step, an initial mesh partition is generated
using the greedy algorithm. During the second step, the subdomain
aspect ratios of this partition are optimized for the benefit of the
optimal convergence of the chosen iterative FETI solver
(see STATICS). This strategy is the default mesh partitioning strategy. Unlike STRAT1:
- For applications where the finite element model contains multiple
disconnected components, each subdomain is allowed to contain elements
from the same component only.
- This mesh partitioning strategy accounts for the WEIGHTS of the elements of the mesh and therefore performs load balancing according to these weights.
- It does not guarantee that the generated mesh partition will contain exactly the requested number of subdomains,
NSUBS,
because it performs some necessary optimizations that may result in the
generation of a slightly different number of subdomains.
- Two alternative strategies intended for use with the parallel direct solver
mumps, and for use in parallel explicit dynamic computations:
- STRAT3, which is based on a greedy algorithm similar to that used in STRAT2, but without some of the mechanism treatments intended for an iterative FETI solver.
- STRAT4, which is based on SCOTCH, the software package
and libraries for sequential and parallel graph partitioning, static
mapping and clustering, sequential mesh and hypergraph partitioning,
and sequential and parallel sparse matrix block ordering.
Note however that neither STRAT3 nor STRAT4 is suitable for any iterative FETI solver, and neither of them accounts for the WEIGHTS of the elements of the mesh and therefore neither of them
performs load balancing according to these weights.
The syntax of this input command is given below.
Note 1: This command can also be executed as a command line when running AERO-S, in which case the syntax is as follows
aeros --dec --nsub <number_of_subdomains> [--trivial --deter --load --mem --exit --allow-mechanisms --use-scotch] <filename.aeros.aicdf>
where:
- The argument
--dec requests a mesh decomposition.
- The argument
--nsub specifies the number of subdomains.
- The argument
--trivial specifies the trivial mesh partitioning strategy STRAT1.
- The argument
--allow-mechanisms requests the deactivation of the special treatment of spring, truss and membrane elements in STRAT2, where the greedy-based algorithm is post-processed to produce
a mechanism-free mesh partition usable by an iterative FETI solver. Hence, this argument has no effect when used together with --trivial or --use-scotch. Since STRAT2 is the default mesh partitioning strategy,
executing this command line without specifying a mesh partitioning strategy activates the mesh partitioning strategy STRAT3.
- The argument
--use-scotch requests the mesh decomposition strategy STRAT4, which is based on the SCOTCH software package and libraries.
The meaning of the other arguments can be easily determined from the explanations of the syntax of the DECOMPOSE
input command given below. In this case, the generated mesh
decomposition file and associated analysis files (predicted load
distribution and memory consumption statistics) are outputted
using the same prefix which is given by the FNAME entry of the command CONTROL.
Note 2: When this command is executed from the command line (see above) and specified in the AERO-S
ASCII Input Command Data file, the value of any argument specified on the command line overrides that specified in the
ASCII Input Command Data file.
Note 3: When a decomposition file is already available, the syntax of the command line
for running AERO-S with this decomposition file on a shared memory is
aeros -d <decomposition_pathandfilename> [-v <verbose_frequency>] -n <number_of_processors>
<filename.aeros.aicdf>
In this case, the above command can also be combined with some of the other features of the command DECOMPOSE as in the following syntax
aeros -d <decomposition_pathandfilename> [--load --mem] [-v <verbose_frequency>] [-n <number_of_processors>] <filename.aeros.aicdf>
Note 4: Using this command to generate an element-based mesh partition (or domain decomposition) of the computational domain
does not imply that the global finite element model data will be
distributed across all (subdomain-based) computational
processes. By default, the entire finite element model data is
duplicated in each MPI process, which is not a memory-efficient
strategy. To distribute the global finite element model data across the
MPI processes according to the generated domain decomposition
— that is, to store in each MPI process only the part of the global data
pertaining to the subdomains assigned to this MPI
process — the following additional steps should also be performed.
First, the finite element model data should be re-arranged
into a set of binary distributed input files associated with the
generated domain decomposition using SOWER
(see SOWER's User's Reference Manual). Then, the aforementioned binary distributed input files should be
inputted to the desired simulation via the ASCII Input Command Data file using the command BINARY and its sub-commands.
In the case of a parallel system with a hybrid memory, if the user does not wish to use SOWER for the aforementioned purpose,
the user should at least use the command mpirun with the "--bynode" option in order to limit the number of MPI processes — and therefore memory duplications —
per shared memory sub-system.
TRIVIAL or ALLOW_MECHANISMS or USE_SCOTCH |
| NSUBS | nsubs
| DETER |
| FSGL |
| OUTFILE | decomposition_pathandfilename
| OUTLOAD |
| OUTMEM |
| EXIT |
| SKIP |
|
|
TRIVIAL
| The two-step strategy based on the greedy algorithm (STRAT2) is the default mesh partitioning strategy (characters). This sub-command keyword can be used to request instead
the trivial mesh partitioning strategy (STRAT1).
|
ALLOW_MECHANISMS
| The two-step strategy based on the greedy algorithm (STRAT2) is the default mesh partitioning strategy (characters). This sub-command keyword can be used to request instead
a modified version of this strategy (STRAT3) where
mechanisms due to various arrangements of spring, truss, and membrane
elements are allowed in order to produce superior mesh
partitions where the number of generated subdomains is as close as
possible to the requested number of subdomains NSUBS (see below).
|
USE_SCOTCH
| The two-step strategy based on the greedy algorithm (STRAT2)
is the default mesh partitioning strategy (characters). This
sub-command keyword can be used to request instead the mesh partitioning
strategy based
on SCOTCH (STRAT4), the software package and libraries for
sequential and parallel graph partitioning, static mapping and
clustering, sequential mesh and hypergraph partitioning, and sequential
and parallel sparse
matrix block ordering.
|
NSUBS
| Sub-command keyword for specifying the desired number of subdomains (characters).
|
nsubs
| Number of subdomains (integer). The generated mesh partition is guaranteed to contain nsubs subdomains only if
the TRIVIAL mesh partitioning strategy is chosen (see
above). Otherwise, the generated mesh partition may contain a different
or slightly
different number of subdomains, because of some optimizations that
could be performed by the other mesh partitioning strategies. The
default value is 1.
|
DETER
| This sub-command keyword is relevant only for the two-step mesh partitioning strategy based on the greedy algorithm (STRAT2),
whose second step is performed
by default using a simulated annealing procedure (characters). It
requests using instead a deterministic approach in order to reduce the
CPU time of the second step.
|
FSGL
| This sub-command keyword is relevant only for the two-step mesh partitioning strategy based on the greedy algorithm (STRAT2) and vibro-acoustic (aka elastoacoustic and fluid-structure) analysis
(for example, see IMPEDANCE)
(characters). It requests performing the mesh decomposition in such a
way that the fluid-structure interface is embedded within the subdomains
as much as possible.
|
OUTFILE
| Sub-command keyword to request outputting the decomposition in <decomposition_pathandfilename> (characters).
|
<decomposition_pathandfilename>
| Name of the mesh decomposition
file (characters). The format of this file is essentially the number and
list of the elements in each subdomain. The default is FNAME.optDec where FNAME is the
prefix specified under the command CONTROL or its own default value.
|
OUTLOAD
| This sub-command keyword is relevant only for the two-step mesh partitioning strategy based on the greedy algorithm (STRAT2) (characters). It requests outputting the load distribution in the file
<decomposition_pathandfilename>.load. The load distribution is based on the weights of the elements in the subdomains (see WEIGHTS and FWEIGHTS).
The default value is off.
|
OUTMEM
| This sub-command keyword is relevant only for the two-step mesh partitioning strategy based on the greedy algorithm (STRAT2), and when an iterative FETI method is chosen as an equation solver (see STATICS)
(characters). It requests outputting in the file <decomposition_pathandfilename>.mem
an estimate of the subdomain-based memory consumption. This estimate is
based on the requirements for factoring the subdomain
matrices by a direct skyline method. By default, mid-side nodes
are ignored by the overall mesh partitioning algorithm. However, when
this option is specified, mid-side nodes are taken into account. Default
value is off.
|
EXIT
| Sub-command keyword to request exiting from AERO-S after the mesh partition is generated (characters). Default value is off.
|
SKIP
| Sub-command keyword to request skipping this command (characters). Default value is off.
|
91 NODAL CONTACT
|
Command Statement: NODALCONTACT
|
The NODALCONTACT command can be used to specify node-to-node contact of the form
or
 where u denotes the displacement field,
where u denotes the displacement field,  denotes the normal to the contact surface oriented from node 1 to node 2, and
denotes the normal to the contact surface oriented from node 1 to node 2, and
 denotes the initial gap. The input format of this command can be as follows.
denotes the initial gap. The input format of this command can be as follows.
Note 1: For mode_v = 1 and mode_v = 3,
the enforcement of the nodal contact constraints by the Lagrange
multiplier method is supported only by the FETI-DP family of solvers,
and for static and implicit dynamic analyses
only.
Note 2: For mode_v = 1 and mode_v = 3, the enforcement of the nodal contact constraints by the elimination method is not supported.
Note 3: For mode_v = 0 and mode_v = 2,
the enforcement of the nodal tied contact constraints by the Lagrange
multiplier method is supported only by the FETI-DP family of solvers,
the GMRES solver, and
the SPOOLES and MUMPS direct sparse solvers with pivoting enabled, and
in all but explicit dynamic analyses.
or
NODALCONTACT MODE default_mode_v
|
followed by one or more lines of the form
NODE_1 NODE_2 N_X N_Y N_Z
|
or
NODE_1 NODE_2 N_X N_Y N_Z GAP gap_v
|
NODE_1 NODE_2 N_X N_Y N_Z MODE mode_v
|
NODE_1 NODE_2 N_X N_Y N_Z MODE mode_v GAP gap_v
|
NODE_1 NODE_2 N_X N_Y N_Z MODE mode_v GAP gap_v CONSTRAINT_METHOD
|
NODE_1
| Id number of the first node (integer).
|
NODE_2
| Id number of the second node (integer).
|
N_X
| x-component of the normal to the contact surface oriented from NODE_1 to NODE_2 (float).
|
N_Y
| y-component of the normal to the contact surface oriented from NODE_1 to NODE_2 (float).
|
N_Z
| z-component of the normal to the contact surface oriented from NODE_1 to NODE_2 (float).
|
GAP
| Keyword to be spelled out (characters).
|
gap_v
| Initial gap between NODE_1 and NODE_2. A negative gap means an initial penetration (float).
|
MODE
| Keyword to be spelled out (characters).
|
mode_v
| Specifying mode_v = 0 designates a tie-of-the-normal-component-of-the-displacement constraint. Specifying mode_v = 1 designates a normal contact constraint. Specifying mode_v = 2 designates a tie-of-the-normal-and-tangential-components-of-displacement constraint. Specifying mode_v = 3 designates both normal contact and tie-of-the-tangential-components-of-displacement constraints (integer).
|
default_mode_v
| Default mode_v for all constraints. If not specified, the default mode is set to 1, i.e. normal contact (integer).
|
CONSTRAINT_METHOD
| This is the method for enforcing the associated constraints (characters). The default method is set in CONSTRAINTS and used whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
elimination
| The elimination method.
|
penalty [beta]
| The penalty method. The parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
92 NODAL FRAMES
|
Command Statement: NFRAMES
|
The NFRAMES command statement can be used to specify nodal reference frames to which any node defined in NODES
can refer to either for the purpose of
specifying in which frame the nodal coordinates are inputted, or in
which frame the nodal degrees of freedom are defined, or both.
Note 1: All nodal degrees of freedom referred to in the ACTUATORS, DISPLACEMENTS, DIMASS, FORCES,
IDISPLACEMENTS, IDISP6, IDISP6PITA, IVELOCITIES, IVEL6PITA, LMPC, NODALCONTACT,
SENSORS, USDD, and USDF commands are defined in the corresponding nodal degree of freedom frames (see NODES)
which by default are the same as the global reference frame. However,
all computed directional results (for example, the x, y and z
components of a displacement field or the xy component of a stress
field) can be outputted in either the nodal reference frames,
or the global reference frame (see OUTPUT).
Two input formats are available for this command: one for the case of a
position frame, and one for the case of a degree of freedom frame. The
total number of lines
below this command statement should be equal to the total number of
different nodal frames referenced in NODES, whether they are position frames or degree of freedom frames.
or
NFRAME#
| ID number of a nodal position
(if 13 entries are inputted on the same line) or degree of freedom (if
10 entries are inputted on the same line) reference frame (integer).
|

| coordinate of the origin of the nodal position frame identified by the ID number specified above (float).
|

| coordinate of the origin of the nodal position frame identified by the ID number specified above (float).
|

| coordinate of the origin of the nodal position frame identified by the ID number specified above (float).
|
|
| First axis of the nodal reference frame identified by the ID number specified above, the nodal x-axis, expressed in the global reference frame (floats).
|
|
| Second axis of the nodal reference frame identified by the ID number specified above, the nodal y-axis, expressed in the global reference frame (floats).
|
|
| Third axis of the nodal reference frame identified above, the nodal z-axis, expressed in the global reference frame (floats).
|
93 NODES *S*
The NODES command statement is used to signal that
the following data lines correspond to the coordinates, position frame,
and degree of freedom frame of each node.
The input data format is given below. There should be as many lines as
the number of nodes in the mesh.
Note 1: All nodal degrees of freedom referred to in the ACTUATORS, DISPLACEMENTS, DIMASS, FORCES, IDISPLACEMENTS, IDISP6,
IDISP6PITA, IVELOCITIES, IVEL6PITA, LMPC, READMODE, SENSORS, USDD, and USDF
commands are defined in the corresponding nodal degree of freedom frames
which by default are the same as the global reference frame. However,
all computed directional results
(for example, the x, y and z components of a displacement field or the
xy component of a stress field) can be outputted in either the nodal
reference frames, or the global reference frame (see OUTPUT).
NODE# X-ORDINATE Y-ORDINATE Z-ORDINATE POS_FRM DOF_FRM
|
NODE#
| ID number of a node (integer).
|
X-ORDINATE
| x-ordinate of the node identified by the specified node ID number (float).
|
Y-ORDINATE
| y-ordinate of the node identified by the specified node ID number (float).
|
Z-ORDINATE
| z-ordinate of the node identified by the specified node ID number (float).
|
POS_FRM
| ID number of the nodal position frame (see NFRAMES)
in which the coordinates of the node identified by the node ID number
specified above are defined (integer). The value 0, which is the
default value, specifies
that the nodal position frame is the global frame. (See NFRAMES).
|
DOF_FRM
| ID number of the nodal degree of freedom frame (see NFRAMES)
in which the degrees of freedom of the node identified by the node ID
number specified above are defined (integer). The value 0, which is the
default value,
specifies that the nodal degree of freedom frame is the global
frame. (See NFRAMES).
|
94 NON INTRUSIVE POLYNOMIAL CHAOS
|
Command Statement: NONINPC
|
The NONINPC command signals to the AERO-S code to perform a non intrusive uncertainty quantification analysis
using the Polynomial Chaos (PC) representation. It requires that the input file also contains the GROUPS, RANDOM,
and STATICS commands as well as their respective data. Essentially, AERO-S computes in this case the mean and standard deviation of a computed primal field v as follows

where  denotes the constant of the PC expansion of the non deterministic field (“the output”), denotes the number of realizations,
denotes the constant of the PC expansion of the non deterministic field (“the output”), denotes the number of realizations,
 denotes the deterministic solution of the field associated with the i-th realization of the random system,
denotes the probability density function,
denotes the deterministic solution of the field associated with the i-th realization of the random system,
denotes the probability density function,  denotes the j-th “basic” random variable which is assumed to be Gaussian,
denotes the j-th “basic” random variable which is assumed to be Gaussian,
 denotes the deterministic coefficient of the i-th PC shape function
denotes the deterministic coefficient of the i-th PC shape function  ,
denotes the total number of PC shape functions representing the non deterministic output, and
,
denotes the total number of PC shape functions representing the non deterministic output, and  denotes the evaluation of at the j-th realization of the random system.
denotes the evaluation of at the j-th realization of the random system.
Note 1: Currently, this command is limited to the post-processing of the results of a linear, static, structural analysis.
The input format of this command is given below.
DEG_OUT
| Degree of the PC representation of the output which, together with the data of the RANDOM command, determines
.
|
NUM_RLZ
| Number of realizations of the random system (which implies the number of deterministic solutions) (integer).
|
95 NONLINEAR ANALYSIS
|
Command Statement: NONLINEAR
|
When the formulated static, quasistatic, or implicit dynamic
finite element (FE) model is nonlinear, this command must be used to
define a nonlinear solution strategy and specify its
parameters. For structural problems, this is the case if:
- Some or all elements of the FE model are not assigned a material
law using MATUSAGE – in which case the default material law/s (see
below) with the parameters described in MATERIAL and
assigned to the elements in ATTRIBUTES
apply – in which case this command automatically accounts for the
geometric nonlinearities in the formulation of the contributions of
these
elements to the global equations of equilibrium using:
- The corotational method for all bar, beam, and shell elements.
- The total Lagrangian method for all 3D solid elements and the membrane elements type 128 and 129.
- A nonlinear material law is specified in MATLAW and attributed to some or all elements of the FE model using MATUSAGE, in which case this command accounts for the following
nonlinearities in the computation of the contributions of these elements to the global equations of equilibrium:
- The material nonlinearities.
- The geometric nonlinearities too, using:
- The corotational method for all bar, beam, and shell elements, if the material law specified in MATLAW involves infinitesimal strains.
(Note that material laws based on finite strains are not permitted for these elements).
- The total Lagrangian method for all 3D solid elements and
the membrane elements type 128 and 129, if the material law specified in
MATLAW involves
finite strains. (Note that material laws based on infinitesimal
strains are permitted for these elements, but in that case, geometric
nonlinearities are
not accounted for).
In the presence of this command in the ASCII Input Command Data file,
if an element of the FE model is not assigned a material law – either
linear or nonlinear – (specified in MATLAW)
using MATUSAGE, it is assigned by default the following material law:
- For a bar, beam, or shell element, the linear elastic material law whose parameters should be specified in MATERIAL.
- For a 3D solid element or a membrane element type 128 or
129, the Saint Venant-Kirchhoff hyperelastic material law, which is an
extension of the linear elastic material model to the
nonlinear regime. This material law has the form
where is the second Piola-Kirchhoff stress tensor,
is the Green-Lagrange strain tensor, and are the Lame constants, and is the second order unit tensor. The Lame properties of
this material law are deduced from the Young modulus and Poisson ratio specified in MATERIAL for the material ID of the aforementioned element as follows
The strain-energy density function for the Saint Venant-Kirchhoff model is defined as
and the second Piola-Kirchhoff stress is given by
In the absence of this command in the ASCII Input Command Data file
however, all elements are assigned linear elasticity as the material law
and the kinematics are assumed to be linear, even when
otherwise implied or specified.
Note 1: In the absence of this command in the input file, all elements are assigned linear elasticity as the material law
and the kinematics are assumed to be linear, even when otherwise implied or specified.
Note 2: Currently, all 3D solid, beam, shell and rigid elements,
and both membrane elements type 128 and 129 can be used for
geometrically nonlinear explicit dynamic analyses.
Note 3: Currently, all 3D solid, beam, shell (except the BT shell
element type 16) and rigid elements, and both membrane elements type
128 and 129 can be used for
geometrically nonlinear static and implicit dynamic analyses.
Note 4: Currently, all 3D solid elements, the membrane elements
(type 128 and 129), the andes shell elements (type 15 and 1515), and the
BT shell element (type 16) can be used for
materially nonlinear explicit dynamic analyses.
Note 5: Currently, all 3D solid elements, the membrane elements
(type 128 and 129), and the andes shell elements (type 15 and 1515) can
be used for materially nonlinear static and
implicit dynamic analyses.
The input format of this command is given below.
| METHOD | (keyword)
| | PARAMETERS | (keyword or keyword and values)
|
|
METHOD |
|
Newton
| This sub-command keyword specifies Newton's method for solving the governing nonlinear equations (characters). This
method is also the default nonlinear solution method.
|
arclength
| This sub-command keyword specifies an arclength method for solving the nonlinear equations associated with a nonlinear
static computation (characters). Such a method differs from
the standard Newton method in the path through which the
captured solution converges, which in this case follows at each
step a direction orthogonal to the tangent of the solution
curve. Specifically, an arc length method causes Newton's method
to converge along an arc, thereby often preventing divergence,
even when the slope of the "load" vs. solution becomes zero or
negative. For this reason, such a method is typically used to
enable the nonlinear solution algorithm to pass limit points, such
as maximum and minimum loads, and snap-through and
snap-back responses. At these limit points, the stability of the
numerical system is dependent on whether the analysis is
performed under load or solution control. In structural analysis,
these limit points are characteristic of buckling or failure.
|
PARAMETERS |
|
MAXITR maxitr_v
| For a nonlinear static,
quasistatic, or implicit dynamic computation, this sub-command keyword
(characters) followed by its integer
value specifies the maximum number of iterations per solve to be
performed by the chosen solution METHOD. The default
value is 100.
|
NLTOL nt1_v nt2_v nt3_v nt4_v
| For a nonlinear static,
quasistatic, or implicit dynamic computation, this sub-command keyword
(characters) and the four real values
following it specify the various tolerances needed for assessing
the convergence of the chosen solution METHOD.
More specifically, the first two parameters nt1_v and nt2_v specify the tolerances for the convergence
of the relative residual and solution increment, respectively (real, real). Their default values are and infinity,
respectively. The third and fourth parameters nt3_v and nt4_v specify the tolerances for the convergence
of the absolute residual and solution increment, respectively (real, real). Their default values are zero and infinity,
respectively. The convergence of the chosen solution METHOD is declared when either of the following occurs (a) both
of the relative residual and relative increment are below their specified respective tolerance levels, or (b) both of the
absolute residual and absolute increment are below their specified respective tolerance levels. Note that a tolerance can
be set to infinity using the characters "INF", and to machine epsilon  using the characters " using the characters "EPS".
|
DLAMBDA real_1 real_2
| This sub-command keyword
(characters) followed by two real numbers specifies the external
"loading" parameters for a
nonlinear static or quasistatic analysis only. However, for a
quasistatic analysis where the material nonlinearities do not
involve any inelasticity, the effect of this sub-command applies
only to the first coupling cycle (see QSTATICS.
The first real number, real_1, specifies the load fraction increment.
The second real number, real_2, specifies the total load factor. For example, "DLAMBDA 0.25 1.0" specifies
applying the external load in 4 steps, using a load increment equal to 0.25*(Original Inputted Source Terms).
On the other hand, "DLAMBDA 0.25 2.0" specifies amplifying first the external loads by the factor 2, then applying the
resulting external load in 8 steps using a load increment equal to 0.25*(Original Inputted Source Terms). This
incremental loading strategy can help the convergence of the chosen solution METHOD.
|
FITALG fitalg_v
| For structural problems, this sub-command keyword (characters) followed by an integer value specifies the fitting
algorithm for the corotational formulation. For fitalg = 1 the tangent stiffness matrix is not
consistent but the corotational framework is supposed to be more robust. For fitalg = 2 (default value), the
tangent stiffness matrix is consistent (integer).
|
FAILSAFE real_1
| For a nonlinear static or implicit dynamic computation, this keyword activates a fail-safe computational strategy when the chosen solution
METHOD fails to converge and the absolute residual is less than the tolerance specified in real_1
(real). The fail-safe strategy consists
in repeating a load-step or time-step computation during which the
aforementioned events occur using half the value of the load-step or
time-step, until Newton's method converges.
Upon convergence, the value of the load-step or time-step is
doubled in each subsequent static or dynamic step computation until the
original value of the load-step
or time-step is restored. The default value of real_1 is machine precision.
|
UNSYMMETRIC
| The contributions to the
tangent stiffness
of various types of configuration-dependent external forces (for
example, pressure, follower forces, and both follower
and axial moments) lead to an unsymmetric geometric tangent
stiffness matrix. For dynamic analysis, the contribution to the
dynamic tangent stiffness matrix of some rotary inertial forces
(for example, discrete inertial moments and rotary intertial
forces emanating from beam and shell elements) also lead to an
unsymmetric dynamic tangent stiffness matrix. By default,
these matrices are symmetrized in order to reduce storage costs
and enable the usage of a symmetric equation solver
(see STATICS), which also reduces CPU costs. Hence, this sub-command keyword can be used to prevent this default
symmetrization (characters). In this case, an unsymmetric equation solver must be specified in STATICS in case the
tangent or dynamic tangent stiffness matrix becomes unsymmetric.
|
REBUILD int_1 [int_2]
| This sub-command keyword (characters) followed by two integers manages two different intervals for deciding when
to rebuild the tangent "stiffness" matrix during the solution of a nonlinear problem by the chosen METHOD. The integer
int_1 specifies the iteration interval within a time-step of a dynamic analysis, or a load-step of a static or quasistatic analysis
where DLAMBDA is used to apply the external load incrementally. For example, int_1 = 1 specifies
rebuilding the tangent stiffness matrix at every iteration, and int_1 = 2 specifies rebuilding it at every second
iteration. The default value for int_1 is 1. Usage of the integer int_2 is optional, and its default value is 1.
Otherwise, int_2 specifies the time-step or load-step interval. For example, int_2 = 1 specifies every
time-step or load-step, and int_1 = 2 specifies every other time-step or load-step. The default value of
int_2 is also 1. Hence, setting int_1 = 1 and int_2 = 1 specifies rebuilding
the tangent stiffness matrix at every nonlinear iteration of every time-step or load-step. Setting int_1 = 2 and
int_2 = 3 specifies rebuilding the tangent stiffness matrix at every second iteration of every third time-step or
load-step. The characters "MAX" can be used to set either or both of int_1 and int_2
to a very large
interval to limit or effectively deactivate rebuilding the tangent
stiffness matrix, respectively. An interesting intermediate
case is given by the combination int_1 = "MAX" and int_2 = 1 which specifies rebuilding the
tangent stiffness matrix only at the start of every time-step or load-step.
|
LINESEARCH ALPROC [maxitr flag]
| This sub-command keyword (characters) is applicable only if Newton is specified as the nonlinear solution
METHOD. It requests equipping Newton's method with a line search strategy and specifies the parameters of this
strategy. In this case, it is recommended to rebuild the tangent stiffness matrix at each Newton iteration
(see REBUILD above).
Given a nonlinear problem of the form
where  and and  denote the nonlinear residual and solution of interest, respectively, Newton's method solves this problem
by computing the iterates denote the nonlinear residual and solution of interest, respectively, Newton's method solves this problem
by computing the iterates
where the increment  is the solution of the linearized problem is the solution of the linearized problem
and denotes the Jacobian (or tangent stiffness) of with respect to
. For highly nonlinear problems, combining
Newton's method with a line search strategy can prove to be a more
appropriate solution method as this combination searches
for the solution of the above nonlinear problem in the form of
less agressive iterates as follows
where  is a step-length computed by AERO-S using either a is a step-length computed by AERO-S using either a backtracking
or a bisection procedure (see ALPROC below).
Note that equipping Newton's method with a line search strategy typically increases the number of iterations
required for convergence. However, for many problems, Newton's method may simply fail to converge without a line search
strategy.
|
ALPROC
| Sub-command keyword to specify a procedure for computing the step-length parameter  of the line search strategy
(characters). Two options are currently available: of the line search strategy
(characters). Two options are currently available:
|
backtracking
| For a given pair of  and , the main idea in this case is to minimize the "merit" function and , the main idea in this case is to minimize the "merit" function

by searching iteratively for the value of which satisfies the first Wolfe condition — aka the "sufficient
decrease condition"

where  is the gradient of with respect to and satisfies is the gradient of with respect to and satisfies
and  is a user-specified "sufficient decrease factor" chosen as is a user-specified "sufficient decrease factor" chosen as  (see below). (see below).
If the tangent stiffness is rebuilt at every iteration (see REBUILD above), the above sufficient
decrease condition can also be written as

Hence, the value of that satisfies this condition is computed iteratively as follows.
The first trial value of is set to the maximum value of 1.0. Then, while the above sufficient decrease
condition is not satisfied, the current value of is reduced by the user-specified "contraction factor"
 (see below) — that is, (see below) — that is,  — until the sufficient decrease
condition is satisfied. — until the sufficient decrease
condition is satisfied.
|
bisection
| In this case, the merit function employed, when applicable, is the scalar-valued potential function whose gradient is
the nonlinear residual defined above (see backtracking) — that is,  . This function is minimized
by applying the well-known bisection root-finding algorithm to search iteratively for the value of which satisfies
the second strong Wolfe condition — aka the "curvature condition" (or "sufficient slope decrease condition") . This function is minimized
by applying the well-known bisection root-finding algorithm to search iteratively for the value of which satisfies
the second strong Wolfe condition — aka the "curvature condition" (or "sufficient slope decrease condition")

where  is a user-specified "sufficient slope decrease factor" that is usually chosen to be much larger than
(see below). is a user-specified "sufficient slope decrease factor" that is usually chosen to be much larger than
(see below).
|
maxitr
| Specifies the maximum number of line search or bisection iterations — that is, the maximum number of iterations for
finding the optimal step-length. The default value of this parameter is 10.
|
| If ALPROC is set to backtracking, this parameter specifies the value of the sufficient decrease factor
(real). In this case, the chosen value must satisfy  and the default value is 1.0e-4. On the other hand,
if and the default value is 1.0e-4. On the other hand,
if ALPROC is set to bisection, this parameter specifies the value of the sufficient slope decrease factor
(real). In this case, the defaut value of this parameter is 0.1.
|
| This parameter is relevant only when ALPROC is set to backtracking. It specifies the value of the
contraction factor (real). The chosen value must satisfy . The default value of this parameter is 0.8.
|
flag
| Setting this output flag to YES requests outputting to the screen some relevant information at each line search
iteration. Setting it to NO (default setting) turns off this output.
|
PENALTY int_1 real_1 real_2
| This sub-command keyword (characters) followed by one integer and two real numbers specifies the parameters
of the penalty or augmented Lagrangian method for enforcing CONSTRAINTS in a nonlinear analysis. The integer
int_1 specifies the maximum number of outer iterations on the penalty parameter in the case of the penalty method,
or on the Lagrange multipliers (and optionally the penalty parameter) in the case of the augmented Lagrangian method;
its default value is 1. The first real number, real_1, specifies the absolute tolerance for assessing the convergence
of the outer iteration loop based on the infinite norm of the constraint violations; its default value is  .
The second real number, .
The second real number, real_2, specifies the factor by which the penalty parameter in either method is increased at
every outer iteration; its default value is 10.
|
96 NONLINEAR SUPERPOSITION OF RIGID AND DEFORMATION MODES
|
Command Statement: FLOATINGFRAME
|
The FLOATINGFRAME command can be invoked to:
- Superpose the rigid body modes and structural deformation modes of
an unrestrained structural system, in order to construct a nonlinear
structural dynamic Reduced-Order Model (ROM) that accounts
for the coupling between rigid and flexible structural modes and
apply this ROM to a nonlinear modal analysis of this structural system.
AERO-S formulates the dynamic ROM in a floating reference
frame attached to the center of gravity of the structural system. The
resulting governing equations of dynamic equilibrium
are in general nonlinear, due to the potentially large
rigid rotations as well as the coupling between the rigid body rotation
modes and the structural deformation modes. These equations
can be written as
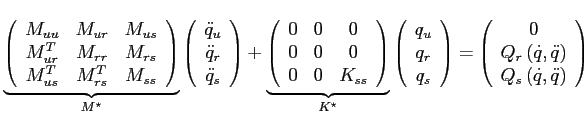
where:
- A dot designates a time-derivative.
- The subscript designates the rigid translation degrees of freedom (dofs) and their related entities.
- The subscript designates the rigid rotation dofs and their related entities.
- The subscript designates the structural deformation generalized dofs and their related entities.
-
 ,
,  , and
, and  denote the vectors of rigid translation, rigid rotation, and
structural deformation dofs, respectively, and collectively form the
vector of generalized dofs
denote the vectors of rigid translation, rigid rotation, and
structural deformation dofs, respectively, and collectively form the
vector of generalized dofs

- The matrices
 ,
,  ,
,  ,
,  ,
,  ,
,  , and
, and  are reduced-order matrices defined by
are reduced-order matrices defined by
 where:
where:
- and
are the symmetric mass and stiffness matrices of the base finite
element model of the unrestrained structural system, respectively.
-
 is the matrix of rigid body translation modes,
is the matrix of rigid body translation modes,  is the matrix of rigid body rotation modes, and
is the matrix of rigid body rotation modes, and  is the matrix of structural deformation modes associated with the
same base finite element model mentioned above.
is the matrix of structural deformation modes associated with the
same base finite element model mentioned above.
- Collectively, , , and
form a Reduced-Order Basis (ROB) and therefore the above governing
equations define a projection-based ROM. For this reason, each of
, , and can be referred to as a partial ROB and each of , , and can be referred to as a vector of generalized coordinates of some type.
-
 and
and  are two vectors of velocity/acceleration-dependent generalized gyroscopic damping forces due to, among other
terms in the above governing equations, the centrifugal, Euler, and Coriolis terms. In general, these two vectors of generalized forces are nonlinear functions of
are two vectors of velocity/acceleration-dependent generalized gyroscopic damping forces due to, among other
terms in the above governing equations, the centrifugal, Euler, and Coriolis terms. In general, these two vectors of generalized forces are nonlinear functions of  and
and
 .
.
- Specify the construction of the aforementioned structural
dynamic ROM and its application to the simulation of the dynamic
response of a structural system whose center of gravity undergoes
a prescribed, planar, circular trajectory at a constant angular
velocity (see below the description of the
RMPT sub-command keyword). In this case,
and become linear functions of and and therefore the above governing equations become linear.
Note that the global, reduced-order mass and stiffness matrices  and
and  , as well as some quantities involved in the evaluation of the two vectors of generalized forces
, as well as some quantities involved in the evaluation of the two vectors of generalized forces  and
and  ,
are invariant in a given simulation. Hence, AERO-S always pre-computes these quantities offline before applying online
the structural dynamic ROM outlined above to the modal
analysis of a structural system. This offline/online staging of the
computations accelerates a modal analysis based on the computational
technology underlying the
,
are invariant in a given simulation. Hence, AERO-S always pre-computes these quantities offline before applying online
the structural dynamic ROM outlined above to the modal
analysis of a structural system. This offline/online staging of the
computations accelerates a modal analysis based on the computational
technology underlying the FLOATINGFRAME command.
It follows that a structural dynamic analysis based on the
structural dynamic ROM described above requires including in the same AERO-S ASCII Input Command Data file:
- The command READMODE, in order to input the matrix . The matrices and are automatically constructed by AERO-S (see the first item under Note 1
below).
There are no orthogonality or orthonormality requirements for or
between any of these three matrices (except currently, for those implied
by the second item under Note 1 below).
- The NONLINEAR command, unless the
RMPT
sub-command keyword (see below) is also specified in the same ASCII
Input Command Data file, in which case the governing equations of
dynamic
equilibrium are linear (see above).
- The DYNAMICS command, together with the
SROM sub-command keyword, and if desired, the OUTPUT command with the result type MODALFLF specified, in order to:
- Construct offline the structural dynamic ROM
outlined above, output it in a file for subsequent exploitation by a
third-party software, and then exit.
AERO-S will output the ROM in a result file of the type
MODALFLF, if the user specifies such a file in the same AERO-S ASCII Input Command Data file
under the OUTPUT command. Then, AERO-S exits if the user has set the value of tt in DYNAMICS to zero.
- Construct offline the structural dynamic ROM, output it if requested, then perform online the structural dynamic analysis described in the remainder of the same
AERO-S ASCII Input Command file.
Note 1: Currently, this command is supported only for:
- Fully unrestrained structural systems with 6 rigid body
modes (3 rigid body translation and 3 rigid body rotation modes). In
this case (and in the context of the
FLOATINGFRAME command), AERO-S automatically computes and using the hybrid geometric-algebraic method underlying the GRBM command, which does not need
to be specified in the same AERO-S ASCII Input Command Data file for this purpose, unless the user wishes to modify its default values.
- Partial ROBs whose columns are eigenvectors of the base finite element model of the undamped structural system (undamped natural modes).
- Implicit dynamic computations using the midpoint
rule (which for linear structural dynamic systems, is also known as the
trapezoidal rule) obtained by setting
, , and in the implicit generalized method described in DYNAMICS.
Note 2: After reading the partial ROB inputted via the READMODE command, AERO-S tests whether any of its columns is a rigid body mode and ignores any such modes.
The syntax for invoking this command is given below.
RMIV
| Sub-command keyword (characters)
for specifying the initial values of the generalized velocity dofs
associated with the rigid body modes. Note that the initial values of
the generalized
velocity dofs associated with the structural deformation modes
should be assigned in IVELOCITIES using the MODAL sub-command keyword.
|

| Initial value of the generalized velocity dof associated with the rigid body -translation mode (real). The default value is .
|

| Initial value of the generalized velocity dof associated with the rigid body -translation mode (real). The default value is .
|

| Initial value of the generalized velocity dof associated with the rigid body -translation mode (real). The default value is .
|

| Initial value of the generalized velocity dof associated with the rigid body -rotation mode (real). The default value is .
|

| Initial value of the generalized velocity dof associated with the rigid body -rotation mode (real). The default value is .
|

| Initial value of the generalized velocity dof associated with the rigid body -rotation mode (real). The default value is .
|
RMPT
| Sub-command keyword (characters)
for specifying a prescribed, planar, circular trajectory at a constant
angular velocity, for the center of gravity of the structural system.
|

| -coordinate of the fixed center of the prescribed planar, circular trajectory (real).
|

| -coordinate of the fixed center of the prescribed planar, circular trajectory (real).
|

| -coordinate of the fixed center of the prescribed planar, circular trajectory (real).
|

| -component of the unit axis of rotation of the prescribed, planar, circular trajectory (real).
|

| -component of the unit axis of rotation of the prescribed, planar, circular trajectory (real).
|

| -component of the unit axis of rotation of the prescribed, planar, circular trajectory (real).
|
| Constant angluar velocity of the prescribed planar, circular trajectory (real).
|
SCAL
| Sub-command keyword (characters) for specifying whether or not to scale the structural deformation modes stored in by the square root of the total structural mass.
|
flagSCAL
| On/Off flag (characters). The default value is Off.
Note that if the command FLOATINGFRAME is used to construct and output the structural dynamic ROM described above, mass scaling must be disabled for compatibility reasons.
|
On
| In this case, the structural deformation modes are scaled by the square root of the total mass of the structural system.
|
Off
| In this case, the structural deformation modes are not scaled by the square root of the total mass of the structural system.
|
97 OUTPUT OF RESULTS (OUTPUT completely spelled out)
Command Statement: OUTPUT [KEYLETTER]
|
The OUTPUT command statement is used to signal that the following
lines of data correspond to specifying which results are to be
outputted. For vector results such as displacement fields,
this command forces AERO-S to output only the three translational
components.
The shared memory version of AERO-S generates ASCII output files. Most of these
are in a format that is suitable for postprocessing by the XPost software, but some are in a format
that is suitable for postprocessing by gnuplot.
The distributed memory version of AERO-S generates binary output files except for the case
of selective nodal output which it generates in ASCII format.
The SOWER software can be used to convert the binary output files into ASCII output files,
in a format suitable for postprocessing by XPost.
All “nodal” output files are generated in the gnuplot format.
Examples using the various OUTPUT commands can be found in FEM.d/fem_examples/Output.d/.
Note 1: In addition to the time-instances implied by the specified value of the parameter INCREMENT,
any result specified for output is also outputted at the beginning of a simulation
if INCREMENT is non zero, and at the of a simulation if AERO-S exits gracefully.
Note 2: The strain and stress outputs are not available for the bar and beam elements, except
for STRAINXX and STRESSXX
Note 3: The internal forces and moments and STRAINXX and STRESSXX for the bar and beam elements are
outputted in the element frames using the sign conventions graphically depicted below.
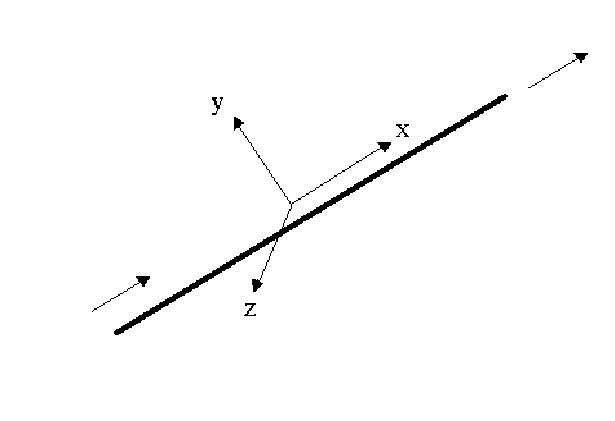
Sign conventions for the output of the internal forces in a bar element
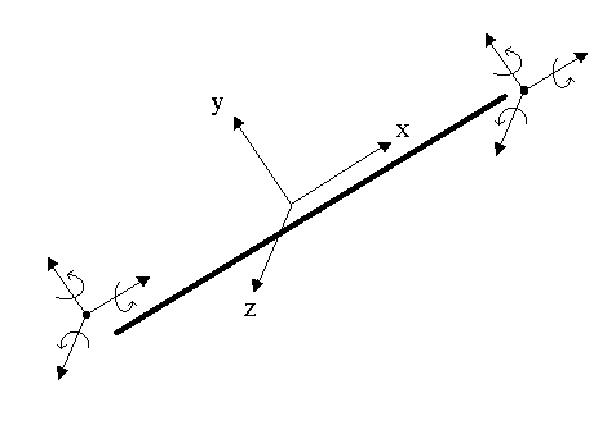
Sign conventions for the output of the internal forces in a beam element
Note 3: For nonlinear structural analysis, the stresses and strains for the corotational elements are
outputted on the deformed configuration and in the corotated frames.
Note 4: For nonlinear structural analysis, the stresses and strains for the total Lagrangian elements are
outputted on the undeformed configuration.
Note 5: For nonlinear structural analysis, the internal forces and moments and STRAINXX and STRESSXX
for the bar and beam corotational elements are outputted in the element frames associated with the deformed configuration.
Note 6: When multiple outputs are expected, they are printed one set after the other in the same output file.
Note 7: To visualize the directions of principal strains and stresses, the auxiliary code PDIREC should be used
to generate the node set and element set used by XPost for this purpose. When running PDIREC, the user is asked to
enter the name of the mesh XPost file (for example, the one obtained from executing AERO-S with the option -t),
a AERO-S result file, the type of that result for labeling purposes (eg. SP1DIREC ), and a characteristic length to
be used for scaling the length of the elements representing the directions to be visualized. PDIREC can also be used
for visualizing any other vector output (eg. GDISPLAC or GVELOCIT).
Note 8: The vocabulary used for the request of stresses and
strains that are associated with the elements listed below differs from
the standard continuum mechanics notation. See below for specific
notations.
Note 9: When both OUTPUT and OUTPUT6 commands are used in the same input file, the KEYLETTER option
specified for one of these two commands applies to all output files requested under both of them; if this option is specified
twice, once for each of these two commands, and the two specified settings differ, the one which is specified last in the
input file prevails.
The input format of this command can be as follows.
RESULT [FORMAT] PATHANDFILENAME INCREMENT [NODE_NUM
BER] [OPTION] [...] [OPTION]
|
or
RESULT [FORMAT] PATHANDFILENAME INCREMENT [N NODE_NUMBER] [OPTION] [...] [OPTION]
|
or
RESULT [FORMAT] PATHANDFILENAME INCREMENT [NG GROUP_NUMBER] [OPTION] [...] [OPTION]
|
KEYLETTER | Optional keyletter specifying how to handle gaps in the numbering of nodes as far as output is concerned.
|
e | In
this case, the output is expanded — that is, padded with zero(es) at
each line corresponding to a gap in the numbering of the nodes.
This is the default case. If XPost is to be used for visualizing the results, the geometry of the AERO-S computational model should be converted in this
case to the XPost format using the option -t or -m to perform the same node padding (see INTRODUCTION).
|
c | In
this case, no padding is performed, and the output file is ordered
according to the ascending order of the freely numbered nodes.
If XPost is to be used for visualizing the results, the geometry of the AERO-S computational model should be converted in this case to the XPost
format using the option -T or -M to avoid any node padding (see INTRODUCTION).
In summary, the user should note that AERO-S accepts gaps in the number of elements and nodes (free numbering) and performs all computations by accounting for such
gaps efficiently. The visualizer XPost can also handle freely numbered nodes and elements; however, for speed purposes, XPost interprets a result as a
node-gap-free result. For this reason, if a AERO-S computational model contains gaps in the numbering of the nodes, using XPost for visualizing the computed
results requires performing one of the following:
- Setting
KEYLETTER to e and converting the geometry of the AERO-S computational model to the XPost format using the
option -t or -m (see INTRODUCTION) — in which case the output files will be larger than needed.
- Setting
KEYLETTER to c and converting the geometry of the AERO-S computational model to the XPost format using the
option -T or -M (see INTRODUCTION)
— in which case the output files will not be larger than needed but a
different node numbering (more specifically, a compressed version)
will be used in the XPost model.
|
RESULT | The following results can be outputted (typically in an ASCII file, unless otherwise noted):
|
GDISPLAC | Nodal displacements. Note that:
- In the context of the OUTPUT6 command,
this result can be used to collect displacement snapshots during a
structural dynamic analysis, for example, for the purpose of
constructing a Reduced-Order Basis (ROB) for (linear or nonlinear)
model reduction (for collecting displacement snapshots for the
purpose of constructing a ROB for nonlinear model reduction,
see also below the description of the output result
STATEVCT). Because this result is stored by default in an ASCII
input file, it is recommended to output it in this case using a higher precision by setting the optional field FORMAT
(see below) appropriately, for example, to 21 15.
- In the context of an online Reduced-Order Model (ROM) simulation and as long as the option
NODE_NUMBER is not used, this result corresponds to the generalized coordinates of the
displacement field. In this case, these generalized coordinates can be transformed into nodal displacements using the RODC command and the keyword SROM of the DYNAMICS command.
If however in the same context the option NODE_NUMBER is used, this result corresponds to the reconstructed high-dimensional displacement at the node specified using NODE_NUMBER.
|
DISPLACX | Nodal displacements in the direction.
|
DISPLACY | Nodal displacements in the direction.
|
DISPLACZ | Nodal displacements in the direction.
|
ROTATIOX | Nodal rotations in the direction.
|
ROTATIOY | Nodal rotations in the direction.
|
ROTATIOZ | Nodal rotations in the direction.
|
ROVECTOR | , , and components of the rotation vector.
|
ANGVELOC | , , and components of the angular velocity vector.
|
ANGACCEL | , , and components of the angular acceleration vector.
|
DISPLMOD | Euclidean norms of the nodal displacements.
|
ROTATMOD | Euclidean norms of the nodal rotations.
|
GDISPMOD | Euclidean norms of the generalized nodal displacements.
|
GVELOCIT | Nodal velocities. In the context of an online Reduced-Order Model (ROM) simulation and as long as the option NODE_NUMBER
is not used, this result
corresponds to the generalized coordinates of the
velocity field. In this case, these generalized coordinates can be
transformed into nodal velocities using the RODC command
and the keyword SROM of the DYNAMICS command. If however in the same context the option NODE_NUMBER is used, this result corresponds to the reconstructed
high-dimensional velocity at the node specified using NODE_NUMBER.
|
GACCELER | Nodal accelerations. In the context of an online Reduced-Order Model (ROM) simulation and as long as the option NODE_NUMBER
is not used, this result corresponds to the
generalized coordinates of the acceleration field. In
this case, these generalized coordinates can be transformed into nodal
accelerations using the RODC command and the keyword SROM
of the DYNAMICS command. If however in the same context the option NODE_NUMBER is used, this result corresponds to the reconstructed high-dimensional acceleration
at the node specified using NODE_NUMBER.
|
ROMATRIX | Rotation matrix representation of nodal rotations (9 components).
|
QUATERNI | Positive unit quaternion representation of nodal rotations (4 components).
|
DSVARVCT | Dual
state variables (Lagrange multipliers associated with constraints)
collected for nonlinear model reduction of contact problems.
|
GTEMPERA | Nodal temperatures.
|
GTEMPVEL | Nodal first time-derivatives of the temperature.
|
GEIGENPA | Eigenvalues and Eigenvectors. If singular modes
are found during an eigen analysis, they are saved in the file FNAME
associated with GEIGENPA before the non-singular eigen results.
|
GEIGSLSH | Sloshing Eigenvalues and Eigenvectors (displacement potential). If a singular
mode is found during the analysis, it is saved in the file FNAME associated with
GEIGSLSH before the non-singular eigen results.
|
SLSHDISP | True fluid nodal displacements associated with the computed sloshing modes.
|
SLSHDSPX | component of the true fluid nodal displacements associated with the computed sloshing
modes.
|
SLSHDSPY | component of the true fluid nodal displacements associated with the computed sloshing
modes.
|
SLSHDSPZ | component of the true fluid nodal displacements associated with the computed sloshing
modes.
|
STRAINXX | component of the (total) strain tensor.
|
STRAINYY | component of the (total) strain tensor.
|
STRAINZZ |  component of the (total) strain tensor. component of the (total) strain tensor.
|
STRAINXY | component of the (total) strain tensor.
|
STRAINYZ |  component of the (total) strain tensor. component of the (total) strain tensor.
|
STRAINZX |  component of the (total) strain tensor. component of the (total) strain tensor.
|
STRAINVM | von Mises strain.
|
EFFPSTRN | Effective plastic strain.
|
STRAINP1 | First principal strain.
|
STRAINP2 | Second principal strain.
|
STRAINP3 | Third principal strain.
|
PLSTRNXX | component of the plastic strain tensor.
|
PLSTRNYY | component of the plastic strain tensor.
|
PLSTRNZZ | component of the plastic strain tensor.
|
PLSTRNXY | component of the plastic strain tensor.
|
PLSTRNYZ | component of the plastic strain tensor.
|
PLSTRNZX | component of the plastic strain tensor.
|
EP1DIREC | Direction of first principal strain.
|
EP2DIREC | Direction of second principal strain.
|
EP3DIREC | Direction of third principal strain.
|
STRESSXX | component of the second-Piola stress tensor.
|
STRESSYY | component of the second-Piola stress tensor.
|
STRESSZZ | component of the second Piola stress tensor.
|
STRESSXY | component of the second Piola stress tensor.
|
STRESSYZ | component of the second Piola stress tensor.
|
STRESSZX | component of the second Piola stress tensor.
|
STRESSVM | (Second Piola) von Mises stress.
|
STRESSP1 | (Second Piola) first principal stress.
|
STRESSP2 | (Second Piola) second principal stress.
|
STRESSP3 | (Second Piola) third principal stress.
|
SP1DIREC | Direction of first principal stress.
|
SP2DIREC | Direction of second principal stress.
|
SP3DIREC | Direction of third principal stress.
|
BKSTRSXX | component of the back stress tensor.
|
BKSTRSYY | component of the back stress tensor.
|
BKSTRSZZ | component of the back stress tensor.
|
BKSTRSXY | component of the back stress tensor.
|
BKSTRSYZ | component of the back stress tensor.
|
BKSTRSZX | component of the back stress tensor.
|
ELEMDELE | List of elements deleted from the finite element model by the element deletion method,
and time at which they were deleted. This output file can be used for post-processing
using xp2exo/ParaView.
|
DAMAGESC | Scalar damage parameter which is equal to 1 when an element is completely damaged and
therefore deleted from the finite element model by the element deletion method, and to 0 when
the element is not damaged.
|
HEATFLXX | Temperature flux along the direction.
|
HEATFLXY | Temperature flux along the direction.
|
HEATFLXZ | Temperature flux along the direction.
|
GRDTEMPX | Temperature gradient along the direction.
|
GRDTEMPY | Temperature gradient along the direction.
|
GRDTEMPZ | Temperature gradient along the direction.
|
INXFORCE | Internal forces along the element -axis. This output result is supported only for bar and beam elements.
|
INYFORCE | Internal forces along the element -axis. This output result is supported only for bar and beam elements.
|
INZFORCE | Internal forces along the element -axis. This output result is supported only for bar and beam elements.
|
AXMOMENT | Internal moments along the element -axis. This output result is supported only for beam elements.
|
AYMOMENT | Internal moments along the element -axis. This output result is supported only for beam elements.
|
AZMOMENT | Internal moments along the element -axis. This output result is supported only for beam elements.
|
ENERGIES | External, Aeroelastic, Elastic, Kinetic, Dissipative,
and Numerical Production energies. The Numerical Production energy
corresponds to the energy conservation error for a conservative system.
When positive, it suggests a numerically unstable scheme. When negative, it suggests
the presence of numerical damping in the scheme. Using the standard notation
and that of the DYNAMICS section, these energies are computed as follows (note that in
the formulae given below, summation is performed over the outputted time-steps):
|
DISSIPAT | Dissipative energy corresponding to  in the output of in the output of ENERGIES
(see above).
When the computational model contains
both material dissipation and structural damping (e.g. Rayleigh
damping), the output
ENERGIES includes a report on their combination. This output result reports on material dissipation separately.
|
AEROFORX | Aeroelastic nodal forces along the direction at , after application of the boundary conditions (see DYNAMICS).
|
AEROFORY | Aeroelastic nodal forces along the direction at , after application of the boundary conditions (see DYNAMICS).
|
AEROFORZ | Aeroelastic nodal forces along the direction at , after application of the boundary conditions (see DYNAMICS).
|
AEROMOMX | Aeroelastic nodal moments along the direction at , after application of the boundary conditions (see DYNAMICS).
|
AEROMOMY | Aeroelastic nodal moments along the direction at , after application of the boundary conditions (see DYNAMICS).
|
AEROMOMZ | Aeroelastic nodal moments along the direction at , after application of the boundary conditions (see DYNAMICS).
|
RAEROFOR | Aeroelastic resultant forces along the , , and directions
(integrated over the wet surface of the structure) at , before application of the boundary conditions (see DYNAMICS).
|
RAEROTFL | Fluid heat fluxes transferred to the structure at .
|
GHELMHOL | Real or complex acoustic pressure scattered field computed by an
acoustic analysis in the frequency domain. The real part is always output first, then, if it is non
uniformly zero, the imaginary part is output as a separate frame but in the same output file.
|
GACOUPRE | Nodal values of the acoustic pressure computed by an acoustic analysis in the time domain.
|
GACOUVEL | Nodal values of the first time-derivative of the acoustic pressure computed by an acoustic analysis in the time domain.
|
GACOUACC | Nodal values of the second time-derivative of the acoustic pressure computed by an acoustic analysis in the time domain.
|
KIRCHHOFF | Acoustic pressure field at locations specified using the KIRLOC
command and evaluated using the Kirchhoff integral.
This result can be outputted
only if the surface of the scatterer is defined using the command HSCB.
The corresponding output file
contains on each line five words of the form: X-ORDINATE_I Y-ORDINATE_I
Z-ORDINATE_I REAL(U_I) IMAG(U_I).
X, Y, and Z-ORDINATE_I are the X, Y, and Z coordinates of the I-th
point specified using the command KIRLOC.
REAL(U_I) and IMAG(U_I) are the real and imaginary parts of the
acoustic pressure field computed at the I-th specified point using the
Kirchhoff integral method.
|
FARFIELD | Farfield pattern of the acoustic pressure field. This field can be output only if the HSCB command is also specified. In this case, the output file contains on
each line four words of the form “ , , real-part(ffp), imaginary-part(ffp)”. The first
two quantities are the spherical angles (expressed in radians) that determine the direction .
The number of output lines depends on the parameter INCREMENT (see below).
|
GENCOORD | Projections of a transient solution onto a modal or other basis specified via the MODE command. This field can be outputted only during a linear dynamic analysis without mesh
decomposition, and if the MODE command is also specified in the ASCII Input Command Data file.
|
MODERROR | Relative
truncation error using the two-norm of the representation of a
transient solution by its projection onto a modal or other basis
specified via the MODE command. This field
can be outputted only during a
linear dynamic analysis without a mesh decomposition, and if the MODE command is also specified.
|
MODALDSP or SROMDISP | Modal
displacement coefficients or generalized displacements, when dynamics
computations are done in a modal or other Reduced-Order Basis (ROB).
This result can be outputted only during a linear dynamic analysis.
|
MODALEXF or SROMEXTF | Modal
external forces coefficients or generalized external forces, when
structural dynamics computations are done in a modal basis.
This result can be outputted only during a linear dynamic analysis.
|
CONPRESS | Contact pressure forces (Lagrange multipliers in the normal directions).
|
CONFACE | Denotes
the status of interactions at a node. A value of 0.5 indicates the node
is not in contact. A value of 1, 2, or 3 denotes the number of
interactions at that node.
|
NORMAL_FORCE_MAG | Normal force magnitude at a node. If multiple constraints exist at a node, the value is for the last constraint.
|
NORMAL_TRACTION_MAG | Normal traction magnitude at a node. If multiple constraints exist at a node, the value is for the last constraint.
|
TANGENTIAL_FORCE_MAG | Tangential force magnitude at a node. If multiple constraints exist at a node, the value is for the last constraint.
|
TANGENTIAL_TRACTION_MAG | Tangential traction magnitude at a node. If multiple constraints exist at a node, the value is for the last constraint.
|
CDIRNORX | x
component of the normal direction for the constraint at a node. If
multiple constraints exist at a node, the value is for the last
constraint.
|
CDIRNORY | y
component of the normal direction for the constraint at a node. If
multiple constraints exist at a node, the value is for the last
constraint.
|
CDIRNORZ | z
component of the normal direction for the constraint at a node. If
multiple constraints exist at a node, the value is for the last
constraint.
|
CDIRTANX | x
component of the tangential direction for the constraint at a node. If
multiple constraints exist at a node, the value is for the last
constraint.
|
CDIRTANY | y
component of the tangential direction for the constraint at a node. If
multiple constraints exist at a node, the value is for the last
constraint.
|
CDIRTANZ | z
component of the tangential direction for the constraint at a node. If
multiple constraints exist at a node, the value is for the last
constraint.
|
SLIP_MAG | Incremental slip at a node. If multiple constraints exist at a node, the value is for the last constraint.
|
NODAL_DISSIPATION | Frictional energy dissipated at a node.
|
CONTACT_AREA | Contact area for a node.
|
GAP_CUR | Normal gap for the current time. If multiple constraints exist at a node, the value is for the last constraint.
|
GAP_OLD | Normal gap from the previous time. If multiple constraints exist at a node, the value is for the last constraint.
|
REACTION | Reaction forces and moments along all three orthogonal directions.
|
HEATREAC | Thermal reaction sources.
|
VMSTTHIC | Nodal sensitivities of the von Mises stress with respect to all thickness variables specified in SENSITIVITY (column by column).
|
WEIGTHIC | Sensitivities of the total weight of the structural model with respect to all thickness variables specified in SENSITIVITY (row by row).
|
VMSTSHAP | Nodal sensitivities of the von Mises stress with respect to all shape (design) variables (column by column).
|
VMSTMACH | For an aeroelastic computation, nodal sensitivities of the von Mises stress with respect to the Mach number.
|
VMSTALPH | For an aeroelastic computation, nodal sensitivities of the von Mises stress with respect to the sideslip angle of attack.
|
WEIGSHAP | Sensitivities of the total weight of the structural model with respect to all shape variables (row by row).
|
STATEVCT
| Snapshots of the state vector (displacements) stored in a binary
file. They can be used, for example, for
constructing a ROB for the purpose of (linear or nonlinear)
model reduction. Currently, this result can be outputted only
during a nonlinear structural dynamic analysis. During a linear structural dynamic analysis, displacement
snapshots can be collected in the result GDISPLAC using the OUTPUT6 command. Because in this case the
displacement snapshots are stored in an ASCII file, it is recommended to output them using a higher precision by
setting the optional field FORMAT appropriately, for example, to 21 15.
|
NODALCOO
| Nodal coordinates of the finite element mesh stored in a binary file. They can be used, for example, for constructing one or multiple (hyper) reduced meshes using the NDSCFG
sub-command keyword of the RMSHC command.
|
VELOCVCT
| Snapshots of the velcity
vector (velocities). Currently, this result can be outputted only during
a nonlinear structural dynamics analysis.
|
ACCELVCT
| Snapshots of the vector of
accelerations. Currently, this result can be outputted only during a
nonlinear structural dynamics analysis.
|
FRCNGVCT
| Snapshots of the vector of
external forces. Currently, this result can be outputted only during a
nonlinear structural dynamics analysis.
|
ROMRESID
| Residual associated with a ROM-based approximate solution defined by a Reduced-Order Basis (ROB) inputted using the READMODE command and (time-dependent) generalized coordinates
inputted using the RODC command. Currently, this result can be outputted only during a nonlinear structural dynamics analysis.
|
ROMEXTFO
| Contribution of the
(possibly configuration-dependent) external forces to the residual
associated with a ROM-based approximate solution defined by a
Reduced-Order Basis (ROB) inputted
using the READMODE command and (time-dependent) generalized coordinates inputted using the RODC command. Currently, this result can be outputted only during a nonlinear structural
dynamics analysis.
|
ROBDATAF
| Prefix of the two binary files containing both instances of the Reduced-Order Basis (ROB) generated by the ROBC command (see in ROBC the MNORMA sub-command keyword).
- If this ROB is a primal ROB, its orthonormalized instance is outputted in the file
<PATHANDFILENAME.orthonormalized>,
and its mass-orthonormalized counterpart is outputted in the file <PATHANDFILENAME.massorthonormalized>. To this effect, note that when inputting this ROB in READMODE using the
first format of this command, the extension ".massnormalized" can be omitted from <pathandfilename> as it will be internally added by AERO-S. On the other hand,
when inputting this ROB in READMODE using the second format of this command, <pathandfilename_i> must be set to the name of the file containing the mass-orthonormalized version
of this ROB unless rob_type_i is set to inorm.
- If this ROB is a dual ROB, and there can be more than one basis computed (see
numrob in ROBC),
each ROB is outputted in a separate file labeled <PATHANDFILENAME>.int, where int is the integer indicating
the dimension of the ROB (recall that when multiple ROBs are computed, they have monotonically increasing/decreasing
dimensions).
|
SAMPLMSH
| This result consists of three files or sets of files:
- A file named
<PATHANDFILENAME>, containing the attributes of the original mesh and therefore all sampling weights needed for performing a hyper reduction,
if computed using the RMSHC command.
Specifically, it is outputted as an inclusive list of element attributes
and their corresponding hyper reduction coefficients
(or weights) (see ATTRIBUTES). In the case of local ROBs, one such file is outputted for each local basis and the extension .cluster<local_basis_id> is
appended to the filename <PATHANDFILENAME>.
- Another file named
<PATHANDFILENAME>.elementmesh.inc containing the reduced mesh as well as that part of the high-dimensional model needed for constructing the
corresponding hyper reduced projection-based reduced-order model – that is:
- The reduced mesh and its weights.
- The attributes and material properties of the elements of the reduced mesh.
- Initial reduced-order displacement and/or velocity
conditions or hyper reduced counterparts, if the corresponding
command(s) is/are included in the same input file
containing RMSHC and the latter command is properly configured.
- The constant reduced-order mass matrix, when the ROB is not mass-orthonormalized (see READMODE); and the flag
flag_cmf was set to Off in the
command RMSHC that generated the content of the file <PATHANDFILENAME>.elementmesh.inc.
- Reduced-order external, constant (non-follower)
forces, if the corresponding command(s) is/are included in the same
input file containing RMSHC.
- Reduced-order linear multipoint constraints (see LMPC), if the corresponding command is included in the same input file containing RMSHC.
In the case of local ROBs, the above information is outputted for each (training) local ROB in the same output file <PATHANDFILENAME>.elementmesh.inc.
Note: When considering an online computation using a
hyperreduced ROM, the user should include in the corresponding ASCII
Input Command Data file the aforementioned
file <PATHANDFILENAME>.elementmesh.inc using an INCLUDE statement (see INTRODUCTION).
- And a third file containing the trace on the reduced mesh of its training ROB: this file is named
<PATHANDFILENAME>.elementmesh.inc.compressed.basis.massorthonormalized, if the training ROB is mass-orthonormalized; otherwise, it is named
<PATHANDFILENAME>.elementmesh.inc.compressed.basis. In the case of local ROBs, one such file is outputted for each local basis and the extension
<local_basis_id> is inserted in the filename <PATHANDFILENAME>.elementmesh.inc.compressed.basis.massorthonormalized after the word basis,
or appended to the filename <PATHANDFILENAME>.elementmesh.inc.compressed.basis.
The format of each of the above files is designed to allow their inclusion in AERO-S's input file using INCLUDE (see INTRODUCTION).
|
MODALMAS or SROMMASS
| ASCII file containing the
reduced-order mass matrix associated with a structural dynamic ROM. In
the case of a nonlinear structural dynamic ROM constructed in a floating
reference frame
attached to the center of gravity of the structural system (see FLOATINGFRAME), this reduced-order mass matrix corresponds to the matrix block .
|
MODALDMP or SROMDAMP
| ASCII file containing the
reduced-order damping matrix associated with a linear structural ROM.
This file is outputted in the format described below.
* Dr: Reduced damping matrix
n n
Dr11 Dr12 ... Dr1n
Dr21 Dr22 ... Dr2n
.
.
.
Drn1 Drn2 ... Drnn
where n denotes the size of the linear structural dynamics ROM. This file is outputted if:
- The ROB underlying the linear structural ROM is of the type
eigen (see READMODE), and damping in the underlying HDM is modeled in DYNAMICS as modal
damping (MODDAMP) or Rayleigh damping (RAYDAMP).
- The ROB underlying the linear structural ROM is of the type
mnorm, inorm, or nnorm (see READMODE), and damping in the underlying HDM is modeled in
DYNAMICS as Rayleigh damping (RAYDAMP).
|
MODALSTF or SROMSTIF
| ASCII file containing the
reduced-order stiffness matrix associated with a structural ROM. In the
case of a nonlinear structural dynamic ROM constructed in a floating
reference frame
attached to the center of gravity of the structural system (see FLOATINGFRAME), this reduced-order mass matrix corresponds to the matrix block .
|
SROMMATR
| ASCII file containing the
reduced-order mass, damping, and stiffness matrices associated with a
(linear) structural dynamics ROM. This file is essentially the union
of all 3 files associated with the results MODALMAS or SROMMASS, MODALDMP or SROMDAMP, and MODALSTF or SROMSTIF.
|
MODALACT or SROMACTU
| ASCII file containing the
reduced-order displacement, velocity, and acceleration control matrices
associated with a linear structural dynamics ROM and three gain
variables (displacement,
velocity, and acceleration) of an output feedback control law
defined using the user-defined subroutine "control.C", ACTUATORS, and SENSORS.
This file is outputted in the format described below.
* Dr: Full reduced-order displacement control matrix
rob_type
n n - n: size of the linear structural dynamics ROM
Dr11 Dr12 ... Dr1n
Dr21 Dr22 ... Dr2n
.
.
.
Drn1 Drn2 ... Drnn
* Vr: Full reduced-order velocity control matrix
rob_type
n n - n: size of the linear structural dynamics ROM
Vr11 Vr12 ... Vr1n
Vr21 Vr22 ... Vr2n
.
.
.
Vrn1 Vrn2 ... Vrnn
* Mr: Full reduced-order acceleration control matrix
rob_type
n n - n: size of the linear structural dynamics ROM
Ar11 Ar12 ... Ar1n
Ar21 Ar22 ... Ar2n
.
.
.
Arn1 Arn2 ... Arnn
|
MODALFLF
| This output result is
relevant only when the simulation is performed using a nonlinear
structural dynamic ROM constructed in a floating reference frame
attached to the center of gravity
of the structural system (see FLOATINGFRAME).
In this case, this is the ASCII file containing the projection-based,
reduced-order coupling tensors required to evaluate the
generalized gyroscopic damping forces associated with the
nonlinear structural dynamic ROM. It is outputted in the following
format
* B_p[0][0]: Full reduced-order fourth-order tensor
3 3
B_p[0][0]11 B_p[0][0]12 B_p[0][0]13
B_p[0][0]21 B_p[0][0]22 B_p[0][0]23
B_p[0][0]31 B_p[0][0]32 B_p[0][0]33
repeat for B_p[0][1], ..., B_p[0][n-1], B_p[1][0], ..., B_p[1][n-1], ..., B_p[n-1][n-1]
* B_t[0]: Full reduced-order third-order tensor
n 3
B_t[0]11 B_t[0]12 B_t[0]13
B_t[0]21 B_t[0]22 B_t[0]23
...
B_t[0]n1 B_t[0]n2 B_t[0]n3
repeat for B_t[1], ..., B_t[n-1]
* B_h[0]: Full reduced-order third-order tensor
3 3
B_h[0]11 B_h[0]12 B_h[0]13
B_h[0]21 B_h[0]22 B_h[0]23
B_h[0]31 B_h[0]32 B_h[0]33
repeat for B_h[1], ..., B_h[n-1]
where denotes the number of flexible modes of the structural dynamic system.
|
FORMAT
| This optional field can be used to
override the default format for outputting a numerical value by one
which consists of 2 integer numbers F and P separated by a blank
(integers).
F specifies the field width — that is, the total number of digits
to be printed including the decimal point, the "E" of the exponent and
the sign of the exponent,
but excluding the sign of the output value. P is the number of
digits after the decimal and before the exponent. For example, 8 2
results in printing the output value 1523 as 0.15E+03.
|
FNAME
| User specified filename associated with result (characters).
|
INCREMENT
| Output increment for transient and eigenvalue results (integer). For a FARFIELD output result,
this field specifies, in the three-dimensional case, the number of longitudinal directions where the farfield
is to be evaluated. In this case, (INCREMENT/2)+1) latitudinal directions are also considered and
therefore the farfield is evaluated at ((INCREMENT/2)+1))*INCREMENT points uniformly distributed
in spherical coordinates. In two-dimensions, the farfield is evaluated at INCREMENT points that are
evenly distributed on a circle. For transient and quasi-static analyses, the final time-instance is always
outputted for the requested fields — except for the aeroelastic forces and moments — independently of the
value of INCREMENT.
|
N
| Sub-command keyword (character) signaling that the next entry is a node identifying number.
|
NODE_NUMBER
| When this optional field is used, with or without the sub-command keyword N, only the computed results associated
with the node NODE_NUMBER are outputted in the same format as otherwise, except that the header of the XPost
file is omitted for easier use of a visualization software such as gnuplot (integer).
|
NG
| Sub-command keyword (characters) signaling that the next entry is a group identifying number (see GROUPS).
|
GROUP_NUMBER
| When this optional field is used together with the sub-command keyword NG, only the computed results associated
with the nodes belonging to the group of nodes GROUP_NUMBER (see GROUPS) are outputted in the following format
which is suitable for a visualization software such as gnuplot (integer).
FLOAT-1
NODE_NUMBER-1 X Y Z RESULT-1 RESULT-2 ... RESULT-n
NODE_NUMBER-2 X Y Z RESULT-1 RESULT-2 ... RESULT-n
...
FLOAT-2
NODE_NUMBER-1 X Y Z RESULT-1 RESULT-2 ... RESULT-n
NODE_NUMBER-2 X Y Z RESULT-1 RESULT-2 ... RESULT-n
...
where FLOAT-i is an -th time-instance in the case of a dynamic analysis or a circular frequency value (number of cycles per second)
in the case of a frequency sweep analysis (see IMPEDANCE),
NODE_NUMBER-j is the -th node number of group GROUP_NUMBER, X, Y and Z are the , , and coordinates
of NODE_NUMBER-j, and RESULT-1 RESULT-2 ... RESULT-n are all the computed results pertaining to NODE_NUMBER-j and
the chosen instance of RESULT.
|
OPTION | Any of the following optional fields can be specified after the previous optional and/or non-optional entries documented above:
|
NDTYPE [NUM_OUT_RLZ]
| NDTYPE is an optional parameter that can take one of the following values: MEAN, STDV, or PDF.
It should be used only when an intrusive or non intrusive non deterministic analysis is performed.
When MEAN is selected and a non intrusive non deterministic analysis is performed, the mean value of the
RESULT is outputted using the number of realizations NUM_RLZ specified in the
NONINPC command. When STDV is chosen and a non intrusive non deterministic analysis is performed,
the standard deviation of the RESULT is outputted using the number of realizations NUM_RLZ
specified in the NONINPC command. When PDF is specified, the probability density
function is outputted using a number of realizations equal to the integer set in the suboptional field NUM_OUT_RLZ
(integer). First, the shape functions are evaluated at NUM_OUT_RLZ realizations of the random system. Then,
NUM_OUT_RLZ realizations of the non deterministic RESULT are reconstructed from these
evaluations using  in the case of a displacement or in the case of a displacement or
 in the case of a stress field
and written in the output file (note that the case of a von Mises stress is treated slightly differently
because it is a nonlinear function of the stress tensor components). A histogram can be constructed from
these results. in the case of a stress field
and written in the output file (note that the case of a von Mises stress is treated slightly differently
because it is a nonlinear function of the stress tensor components). A histogram can be constructed from
these results.
|
AVG_OPTION
| If the output of a stress field, strain field, or the damage parameter field DAMAGESC is requested, the user
can set this optional parameter to one of the following values: NODALFULL, NODALPARTIAL, NODALPARTIALGROUP, ELEMENTAL,
or GAUSS (characters), to specify a type of stress/strain/damage averaging. If NODALFULL
is specified,
the target field is averaged at each node using all elements
attached to this node. In this case, the contributions of the
beam and bar elements are first transformed to the global
frame. If NODALPARTIAL is specified, the averaging is performed using only the elements that are neither of
a bar or a beam type. If NODALPARTIALGROUP is specified and the keyword NG is used to activate output for a group of nodes,
the averaging is performed using only those elements whose nodes belong to the specified group. If ELEMENTAL
is specified, the field is outputted without any averaging at each node of each element. Note however
that currently, the option ELEMENTAL is not supported when a FETI solver is invoked. If GAUSS
is specified,
the target field is outputted without any averaging at each
Gauss point of each element. This latter option is currently
supported however only for nonlinear analysis using
three-dimensional solid elements (type 17, 23, 24, 25, 72, 91, 92
and 94) for which constitutive laws are specified using MATLAW.
|
STR_TYPE_OPTION
| This optional field is applicable only for linear analyses. It can have any of the following settings:
THERMAL, MECHANICAL, or THERMOMECHANICAL (default setting). In the first case, the computed and outputted stresses are the thermal stresses
defined as  , where is the pertaining constitutive matrix, is the thermal expansion coefficient specified in MATERIAL, is the temperature (absolute),
and is the ambient (reference) temperature (absolute) also specified in MATERIAL. In the second case, the computed and outputted stresses are the mechanical stresses
defined as , where is the pertaining constitutive matrix, is the thermal expansion coefficient specified in MATERIAL, is the temperature (absolute),
and is the ambient (reference) temperature (absolute) also specified in MATERIAL. In the second case, the computed and outputted stresses are the mechanical stresses
defined as  , where
is the strain tensor. In the last case, which is the default setting,
the computed and outputted stresses are the thermomechanical stresses
defined as , where
is the strain tensor. In the last case, which is the default setting,
the computed and outputted stresses are the thermomechanical stresses
defined as  . .
|
STR_SHELL_OPTION
| This optional field is applicable only when the output of a stress/strain field of a shell element is requested.
It can take any of the following values UPPER, MEDIAN, LOWER (characters). If UPPER is specified, the stresses are computed
on the upper surface of the element. If MEDIAN is specified (default value), they are computed on the median surface of the element.
If LOWER is specified, they are computed on the lower surface of the element.
|
STR_BEAM_OPTION
| This optional field is applicable only when the output of STRAINXX or STRESSXX of a beam element is requested. It specifies
two real numbers (real). The first (second) real number represents the positive or negative y (z) coordinate in percentage of the maximum
positive (top fiber) or negative (bottom fiber) y (z) coordinate of the beam cross section, in the local frame attached
to the beam, of the fiber at which or is requested. The default value for both real numbers is zero.
|
COMPLEX_OUTPUT_OPTION [NSTEPS]
| These optional and suboptional fields are applicable only when the output is complex-valued. COMPLEX_OUTPUT_OPTION can take any of
the following values REALIMAG, MODPHASE, ANIM (characters). When set to REALIMAG, the real parts of the complex-valued output are
printed first and the imaginary parts are printed next. When set to MODPHASE, the moduli of the output values are first printed and
then the phases are printed. When set to ANIM, the values of  are printed first, followed by the values
of are printed first, followed by the values
of  , etc, concluding with the values of , etc, concluding with the values of  , where , where  is defined as is defined as  and is specified in the suboptional field
and is specified in the suboptional field NSTEPS (integer).
|
FRM_OPTION
| This optional parameter can be used to request outputting directional results (such as, for example, the , and components of a computed displacement field,
or the
component of a computed stress field) in the nodal reference frames
defined at the nodes of the finite element model, in the global
reference frame, or in the material
reference frame. In the first case, this parameter should be set to NODFRA. In the second case, its should be set to GLOFRA. In the third case, it should be set
to MATFRA. Its default value is GLOFRA. For this reason, when outputting a directional result to be reused with the READMODE command, this parameter
should be set to NODFRA.
|
ORTHONORM_OPTION
| This optional field is applicable only when the result to be outputted is GEIGENPA. It specifies whether to output the computed mass-orthonormalized eigenvectors or associated
orthonormalized vectors (characters). Hence, it can take one of the two following values:
|
mnorm
| In this case, which is the default case, the computed mass-orthonormalized eigenvectors are outputted.
|
inorm
| In this case, (identity-)
orthonormalized vectors that span the same subspace as the
mass-orthonormalized eigenvectors are outputted.
|
ROTVEC_OPTION
| This optional parameter can be used to select the specific type of rotation vector output for GDISPLAC (only under OUTPUT6), ROTATIOX, ROTATIOY, ROTATIOZ, ROTATMOD, and
GDISPMOD. It can can take values Euler (default value), Complement, Linear, ReducedEulerRodrigues, CayleyGibbsRodrigues, WienerMilenkovic, or BauchauTrainelli.
The default Euler rotation vector, also known as
the axis-angle representation, is a vectorial parameterization of the
rotation group whose magnitude is the (scalar) rotation angle and rotation axis is the
unit 3-vector  — that is, — that is,  . This is not to be confused with non-vectorial Euler angles for the
parameterization of rotation. The complement rotation vector is
specifically the complement
of the Euler rotation vector and corresponds to a rotation
angle of (
. This is not to be confused with non-vectorial Euler angles for the
parameterization of rotation. The complement rotation vector is
specifically the complement
of the Euler rotation vector and corresponds to a rotation
angle of (  ) about the axis ) about the axis  . For details about the other options, refer to The vectorial parameterization of rotation,
by Bauchau and Trainelli, in Nonlinear Dynamics, 32, No 1, pp. 71–92, 2003. Regardless of the value of . For details about the other options, refer to The vectorial parameterization of rotation,
by Bauchau and Trainelli, in Nonlinear Dynamics, 32, No 1, pp. 71–92, 2003. Regardless of the value of ROTVEC_OPTION, the rotation vector is a representation of the "total rotation" — that is, it is measured
with respect to the reference orientation (which corresponds in AERO-S to the case where the rotation matrix is the identity matrix).
|
ORTHONORM_OPTION
| This optional field is applicable only when the result to be outputted is GEIGENPA. It specifies whether to output the computed mass-orthonormalized eigenvectors
or associated orthonormalized vectors (characters). Hence, it can take one of the two following values:
|
mnorm
| In this case, which is the default case, the computed mass-orthonormalized eigenvectors are outputted.
|
inorm
| In this case, (identity-)
orthonormalized vectors that span the same subspace as the
mass-orthonormalized eigenvectors are outputted.
|
RESCALING FLAG
| Optional sub-command keyword followed by an On or Off
flag which can be used to define whether or not to rescale the
rotation vector – which is a one-to-many mapping from the rotation
matrix.
It applies to GDISPLAC, GVELOCIT, and GACCELER under OUTPUT6, and to ROTATIOX, ROTATIOY, ROTATIOZ, ROTATMOD, and GDISPMOD. The default value of FLAG
is On. The specific interpretation of this option depends on the setting of ROTVEC_OPTION. For example, in the case of an Euler rotation vector, setting FLAG to On means that the outputted
rotation vector is that with a rotation angle  . When the rotation vector is rescaled, its components become
discontinuous at the point of rescaling. Otherwise, its components may
be discontinuous at
certain singularity points (
. When the rotation vector is rescaled, its components become
discontinuous at the point of rescaling. Otherwise, its components may
be discontinuous at
certain singularity points (  in the case of the Euler rotation vector). in the case of the Euler rotation vector).
|
ANGULAR_OPTION
| This optional parameter can be used to choose a definition of the angular velocity or acceleration for GVELOCIT or GACCELER under OUTPUT6. It can take the following values:
Convected (default), Spatial, and Total. The Convected definition refers to a moving frame that is computed by AERO-S and attached to each node.
The definition Spatial refers to the fixed reference frame, and the definition Total refers to the time derivatives of the (Euler) rotation vector. In the case of Total, the RESCALING
option
may also be used to specify whether the angular velocity
(acceleration) is the first (second) time derivative of the rescaled or
non-rescaled Euler rotation vector. Note that angular velocities and
accelerations
inputted using IVEL or USDD should be Convected.
|
98 OUTPUT OF RESULTS 6 COLUMNS (OUTPUT6 completely spelled out)
Command Statement: OUTPUT6 [KEYLETTER]
|
The OUTPUT6 command has the same options and format of the OUTPUT command.
Its outcome differs from that of OUTPUT only when vector results such as generalized displacements
fields are to be outputted. In that case, the OUTPUT6 command forces
AERO-S to output all six components of the generalized displacement field in a format slightly different
from that of the file created by OUTPUT, in that the node number is included at the beginning of each line.
Note 1: When multiple outputs are expected, they are printed one set after the other in the same output file.
Note 2: When both OUTPUT and OUTPUT6 commands are used in the same input file, the KEYLETTER option
specified for one of these two commands applies to all output files requested under both of them; if this option is specified
twice, once for each of these two commands, and the two specified settings differ, the one which is specified last in the
input file prevails.
99 PARALLEL-IN-TIME ALGORITHM (PITA)
The PITA command statement is used to request the parallelization in time of the time-integration
algorithm specified under the DYNAMIC command. This option is supported only when executing the distributed
version of the AERO-S executable. The simultaneous presence of the command statement NONLINEAR in the input
file automatically triggers the nonlinear version of the PITA algorithm. By default, the initialization of
the time-slices is performed by running the chosen time-integrator on the coarse time-grid. Alternatively, the
IDISP6PITA (see IDISP6PITA) and IVEL6PITA (see IVEL6PITA) commands can be used to specify the
seed displacements and velocities.
The imput format is given below.
Note 1: The current implementation allows only geometric nonlinearities.
Note 2: The foundations of the PITA methodology are described in: J. Cortial, Time-Parallel Methods for Accelerating the Solution of Structural Dynamics Problem, PhD Thesis, Stanford University, 2011.
J_RATIO MAX_ITER
PITA_OPTIONS
|
or
J_RATIO MAX_ITER MAX_SLICES_ON_CPU
PITA_OPTIONS
|
J_RATIO
| Ratio between the time-steps on the fine and coarse time-grids. Also, number of time-steps in each time-slice (integer).
|
MAX_ITER
| Maximum number of outer PITA iterations (integer).
|
MAX_SLICES_ON_CPU
| Maximum number of time-slices
assigned to a processor (integer). If the number of time-slices is
larger than the number of available CPUs,
the supernumerary time-slices are ignored. For optimal
performance, there should be as many available CPUs as time-slices. The
default value is 1.
|
PITA_OPTIONS
| None, one or several of the following optional statements
|
TIMEREVERSIBLE
| Instructs AERO-S to
exploit the time-reversibility of the problem. In this case, each
time-slice is divided into 2 halves, one treated by usual
forward-in-time integration, and the other by backward-in-time
integration. For optimal performance, 2 CPUs should be assigned to each
time-slice.
|
ORTHOPROJTOL orthoprojtol
| Sets the relative tolerance used to construct the orthogonal projectors for the correction step. The default value is .
|
READINITSEED
| Instructs AERO-S to use the initial seed information provided via the commands IDISP6PITA and IVEL6PITA.
If additional seed values are required, they are obtained in this case via time-integration on the coarse time-grid.
|
REMOTECOARSE
| Instructs AERO-S to
perform the coarse time-grid integration on a dedicated CPU, which will
not be available during the parallel integration
on the fine-time grid (linear case only). For optimal performance
in the linear case, it is recommended to use this option and provide one
additional CPU.
This command is ignored when only one CPU is available.
|
NOFORCE
| Informs AERO-S about the absence of any external force so that a special version of the PITA
can be executed for optimal performance (linear case only).
|
JUMPCVG jumpcvg
| Instructs AERO-S to enable the jump-reduction-based convergence criterion with the specified tolerance jumpcvg (linear case only).
The default value is J_RATIO  . .
|
GLOBALBASES integer
| Determines the scheme to use for updating the global bases using the following convention:
1 = all seed vectors, 2 = all seed and propagated vectors (nonlinear case only). The default value is 1.
|
LOCALBASES
| Instructs AERO-S to use the local basis updating scheme instead of the global one (nonlinear case only).
This option may improve performance but at the expense of time-accuracy.
It is not implemented (and therefore ignored) for time-reversible simulations.
|
JUMPOUTPUT
| Instructs AERO-S to output the magnitudes of the jumps.
|
100 PRELOAD
|
Command Statement: PRELOAD
|
The PRELOAD command statement can be used to specify
a preload for a truss or a membrane element.
For a truss element, the preload is an axial force that affects its
stiffness matrix. For a membrane element,
the preload is a three-dimensional generalized force (or force per unit
directional length) that also affects its element stiffness matrix.
In both cases, the default value(s) of the the preload is (are) zero.
It is assumed that the nodal coordinates of the model specified under NODES include the deformations due to
preload.
Preload affects all of linear, nonlinear, static, transient, and eigen analyses.
For a truss element, the outputted internal axial force includes the amount of preload.
For a membrane element, the outputted stresses also include the amount of preload.
The following two formats are supported and can be mixed.
ELEMENT# PRELOAD_VALUE1 PRELOAD_VALUE2 PRELOAD_VALUE3
|
STARTING_ELEMENT# THRU ENDING_ELEMENT# PRELOAD_VALUE1 PRELOAD_VALUE2 PRELOAD_VALUE3
|
ELEMENT#
| Element number where a preload is to be specified (integer).
|
PRELOAD_VALUE1
| For a truss element, value
of the axial preloading force. For a membrane element, value of the
preload generalized force (force per unit length) in the global direction (float).
|
PRELOAD_VALUE2
| For a membrane element, value of the preload generalized force (force per unit length) in the global direction (float).
|
PRELOAD_VALUE3
| For a membrane element, value of the preload generalized force (force per unit length) in the global direction (float).
|
STARTING_ELEMENT#
| First element of a sequence of elements where a specified preload value or set of values apply (integer).
|
THRU
| Keyword indicating that the following entry is the last element of a sequence of elements (characters).
|
ENDING_ELEMENT#
| Last element of a sequence of elements where a preload value or set of values apply (integer).
|
101 PRESSURE
Command Statement: PRESSURE [LOADSET_ID]
|
The PRESSURE command can be used to specify a piece-wise uniform pressure field, and/or a pressure field resulting from an air blast in the
free field and whose parameters are specified under the CONWEP command. The specified pressure field can be applied to beam elements, membrane elements, shell elements,
and surface elements defined in SURFACETOPO. For a beam element (type 6 or 7), the pressure is actually a load per unit length applied in the Y-direction of the element frame specified in the EFRAMES command or implied by the third node technique
for beam elements (see TOPOLOGY).
For a membrane element (type 128, or 129), a shell element (type
8, 88, 15, 1515, 16, 20, 2020, 73, or 76), or a surface element defined
in SURFACETOPO for the sole purpose of defining a surface computation that may be
independent from any specific element type, the pressure field is applied normal to the surface
of the element using the usual convention of a positive outward normal — that is, if the three
nodes of a shell element are denoted by a, b, and c and numbered in this order, the normal is computed as
 . Furthermore, a positive value of
. Furthermore, a positive value of PRESSURE_VALUE implies a force in the direction
of the normal.
In a nonlinear analysis, the generated pressure forces are of the follower type for shell elements and surface elements defined in SURFACETOPO.
Note 1: AERO-S always generates pressure loads using a consistent method.
Note 2: The piece-wise uniform pressure field represented by the pressure value PRESSURE_VALUE can be varied in time using the command MFTT.
Note 3: If the surface of interest is already discretized with beam or shell elements, using the ELEMENT# method of pressure input is more consistent with the remainder
of the finite element analysis than using the SURFACE
counterpart, because in this case the pressure loads are computed using
the shape functions of the corresponding beam or shell elements.
Note 4: The blast pressure generated by CONWEP is currently not applicable to beam or membrane elements.
The following three formats are available for this command and can be mixed.
ELEMENT# PRESSURE_VALUE [CONWEPSWITCH]
|
STARTING_ELEMENT# ENDING_ELEMENT# PRESSURE_VALUE [CONWEPSWITCH]
|
SURFACE SURFACE# PRESSURE_VALUE [CONWEPSWITCH]
|
LOADSET_ID
| Optional non-negative integer
which identifies explicitly the "load" set to which the source term
generated by this command belongs to (integer).
The default value is 0. Hence, the PRESSURE command can be repeated as many times as desired within the same input file using
each time a different value for LOADSET_ID and different data. The LOADCASE command can refer to LOADSET_ID to define one or multiple "load" cases
for static analysis (see the STATICS command and the explanation of its sub-command keyword CASES), and/or the "load" case for dynamic analysis.
|
ELEMENT#
| Element number where a pressure field is to be specified (integer).
|
PRESSURE_VALUE#
| Value of the piece-wise uniform pressure field (or load per unit length for a beam element) in that element (float). If CONWEPSWITCH is set to On, this pressure value is added to the blast
pressure generated by the CONWEP software module.
|
CONWEPSWITCH
| On/Off switch for the pressure load due to an air blast in the free field whose parameters are set in the CONWEP command (characters). If this switch is
set to On, the pressure field computed by the software module CONWEP is added to that specified in PRESSURE_VALUE. Otherwise, only the pressure value
specifies in PRESSURE_VALUE is used to generate the
pressure load to be applied on the specified element or set of elements.
The default value of this switch is On.
|
STARTING_ELEMENT#
| First element of a sequence of elements where the piece-wise uniform pressure field has the same value (integer).
|
ENDING_ELEMENT#
| Last element of a sequence of elements where the piece-wise uniform pressure field has the same value (integer).
|
SURFACE
| Keyword indicating that a surface defined in SURFACETOPO is to be identified next by its integer identification number (characters).
|
SURFACE#
| Integer identification of the surface defined in SURFACETOPO where the uniform pressure value PRESSURE_VALUE is to be applied (integer).
|
102 PRINTMAT
|
Command Statement: PRINTMAT
|
The PRINTMAT command statement can be used to
request outputting to ASCII files the global stiffness and mass matrices
in matrix market format.
This format is a sparse matrix format that can be read by other programs
such as MATLAB.
The numbering of the rows and columns of the printed sparse
matrices corresponds to a trivial numbering of all unconstrained degrees
of freedom attached
to an element of the mesh. It is constructed as follows. First, any
constrained and unused degrees of freedom are eliminated. Second, the
remaining degrees
of freedom are numbered by sorting them in ascending order of their node
number. Third, the degrees of freedom with a common node number are
further sorted
in ascending order according to the degree of freedom index (1:
x-displacement, 2: y-displacement, 3: z-displacement; 4: x-rotation,
etc). Any other
renumbering system specified using the RENUM command is ignored as far as this comand is concerned.
Note 1: This command may only be used in the absence of a mesh decomposition: currently, it is not supported for explicit dynamics.
Note 2: If any hyper reduction coefficients are specified in the ATTRIBUTES command, the outputted matrices are the stiffness and mass matrices assembled
using the inputted mesh or sampled mesh, weighted by these coefficients.
Note 3: In the presence of this command in the ASCII Input Command Data file, AERO-S will exit after printing the aforementioned matrices and therefore will not perform any specified analysis.
PRINTMAT pathandfilenameprefix
|
pathandfilenameprefix
| Specifies a prefix for the
output files to contain the global stiffness and mass matrices in matrix
market format (character string). The suffixes “.stiffness” and “.mass”
will be automatically appended to this prefix by AERO-S.
|
103 QUASISTATICS ANALYSIS
|
Command Statement: QSTATICS
|
The QSTATICS command statement is used to signal that the subsequent data lines correspond to the following quasistatics
iterative algorithm for solving either Ax=b, where A represents a diagonal block of a coupled linear-linear or
linear-nonlinear (multidisciplinary) system and can be singular, or r(x,b)=0, where r represents a row block of a
coupled nonlinear-linear or nonlinear-nonlinear (multidisciplinary) system.
For problems of the form Ax=b, the iterative solution algorithm underlying this command can be described as follows


For problems of the form r(x,b)=0, the iterative solution algorithm underlying this command can be described as

For single discipline analysis, the above algorithm is at best (  ) a direct solution method.
) a direct solution method.
This command is currently relevant for aeroelastic and aerothermal static analyses where the structural or thermal system
(respectively) is linear, or aeroelatic static analyses where the structural system is nonlinear. In the first case, A
can represent a structural stiffness matrix for aeroelastic analysis, or a conductivity matrix for an aerothermal analysis.
In this case, the second and fourth steps of the iterative solution algorithm are enabled only for an aerothermal analysis
in which the thermal problem is singular, A represents the matrix of the thermal sub-system, and R represents a
basis of its null space. In the second case, r represents the residual of the nonlinear equations governing static equilibrium of the structural system.
This command can also be used to compute a flow-induced load and
perform the corresponding static structural analysis. In this case,
it must be used together with the staggered solution procedure B0 of the AERO command.
For all purposes outlined above, this command requires the additional usage of the AERO command to specify either
the structure matcher file, or the discrete surface to be embedded in the fluid grid, as needed.
Note 1: An equation solver must be specified under the STATICS command.
The input format of this command can be as follows.
104 RANDOM
|
Command Statement: RANDOM
|
The RANDOM command statement is used to signal that some materials have properties with random values.
All random material properties are assumed to have a Gaussian probability distribution.
Note 1 : Currently, an input file can specify only one random material property per group.
Note 2 : To ensure the positivity of the material properties at every realization, the following non-Gaussian model is used
 with the constraint
with the constraint  . Here denotes a standard normal random variable.
. Here denotes a standard normal random variable.
The input format of this command is given below.
GROUP#
| Id of the element group for which the random properties are to be specified (integer).
|
MATPROP#
| Material property for which the random properties are to be specified (string).
Currently, this keyword can take any of the following values: E (Young's modulus), A
(cross section of a bar or beam element), and kx, ky, and kz (linear spring coefficients
(see MATERIAL).
|
MEAN
| Mean value of the non deterministic MATPROP (real). This value overwrites the deterministic
value of MATPROP specified under the MATERIAL command for the elements in the corresponding
GROUP#.
|
STDV
| Standard deviation of the non deterministic MATPROP (real).
|
105 READING REDUCED BASES
Command Statement: READMODE
|
The command READMODE can be used for:
- Reading one or multiple primal Reduced-Order Bases (ROBs) .
- Reading one or multiple dual ROBs constructed for the model reduction of constrained nonlinear problems.
- Signaling to AERO-S the context of a projection-based Reduced-Order Model (ROM).
Each inputted ROB may be identified by an integer ID number and
characterized by a type that covers, among others, different forms of an
eigen basis (basis of eigenvectors) or a
POD (Proper Orthogonal Decomposition) basis (see ROBC), and a non-negative basis. Such a ROB can be used, for example, to perform reduced-order dynamic computations
(see DYNAMICS), or a "Basis Ping-Pong" analysis (see AERO).
Initial conditions for the generalized coordinates associated
with a chosen primal ROB can be directly specified using, for example, IDISPLACEMENTS, IVELOCITIES,
and/or ITEMPERATURES, as appropriate.
A primal ROB and a dual ROB
can also be used to hyper reduce linear and nonlinear problems with
equality or inequality constraints (see below for limitations).
Note 1: All degrees of freedom referred to by this command are
defined in the nodal degree of freedom reference frames defined at the
nodes
where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal degree of freedom reference frames are the same
as the global reference frame.
Note 2: Currently, the reduction of inequality constraints is
supported only for nonlinear implicit dynamic computations such as
nonlinear implicit dynamic contact problems,
and only for those cases where the constraints are linear and enforced
using the Lagrange multipliers method.
Note 3: In such cases, snapshot collection for the construction of a dual basis can be performed only when the constraint method (see CONSTRAINTS) is one of the following methods:
multipliers equipped with the FETI DP solver (see STATICS).
augmented equipped with the parallel mumps solver (see STATICS).
Note 4: Currently, the reduction of equality constraints is supported only when such constraints are enforced using the penalty method.
Two formats are available for this command:
- The first command format described below should be used only in the case of:
- A primal structural ROB that is a mass-orthonormalized eigen basis.
- A primal thermal ROB that is a capacitance-orthonormalized eigen basis.
- An arbitrary primal ROB that is destined for a "Basis Ping-Pong" analysis (see AERO).
READMODE <pathandfilename> numvec
|
<pathandfilename>
| Name of a file (including path, if needed) containing a primal ROB to be read and whose ID (see rob_idi below) is automatically set to 0; or prefix of two binary
files containing the orthonormalized and mass-orthonormalized instances of a primal ROB generated by the ROBC command (see ROBDATAF under the OUTPUT
command) (characters). In the first case, all three formats
described below are supported for this file, whereas in the second case,
only the third format described below is
supported:
- The first file format is an ASCII format that can be described
as follows.
The first line contains the number of ROB vectors included in this
file. The second line specifies the number of nodes of the underlying
mesh. The ROB vectors follow afterwards.
Each ROB vector is specified by a scalar written on a separate
line, followed by a number of lines equal to the number of nodes of the
high-dimensional model. The scalar is:
- A frequency (number of cycles per second) in the case of a primal structural ROB.
- A singular value in the case of a POD-based structural ROB.
- An eigenvalue of the thermal pencil in the case of a thermal ROB.
Each line following this scalar contains the 1
(temperature), 3 (displacements), or 6 (displacements and rotations)
values of the ROB that node.
Alternatively, each ROB vector can be specified by the same scalar
described above written on a separate line, followed by a number of
lines equal to the number of nodes,
each containing the node number followed by the 1 (temperature), 3
(displacements), or 6 (displacements and rotations) values of the ROB
at this node.
- The second file format is the XPost ASCII format. In this case, the first line of the file contains a header and the second one contains the number of nodes
in the underlying mesh. The ROB vectors follow afterwards as in the first file format.
- The third file format is a binary format generated by the ROBC command and readable by the present command.
In this case:
<pathandfilename> should be set to the prefix of the two binary files containing the
orthonormalized and mass-orthonormalized instances of a primal ROB generated by the ROBC command (see ROBDATAF under OUTPUT); and AERO-S uses
the flag flag_mnb set in the RMSHC command and/or the type of the time-integration scheme specified in the DYNAMICS command to select one
of the two inputted ROB instances – as explained in RMSHC.
|
numvec
| When the input file <pathandfilename> is written in the first file format described above, the size of the ROB adopted by AERO-S
is the number of ROB vectors
specified on the first line of this input file. When this file is
written in the second or third file format described above, the size of
this ROB is equal to the number of ROB vectors contained in
the aforementioned file. However, if this parameter is specified
and set to a non-zero value, only the first numvec ROB vectors are read from the input file <pathandfilename>:
in this case, whatever file format <pathandfilename> is written in, the size of the primal ROB adopted by AERO-S becomes equal to numvec
(integer). On the other hand,
if this parameter is omitted or set to 0, the number of vectors
constituting the ROB — and therefore the size of this ROB — is obtained
from the content of <pathandfilename>.
Finally, if this parameter is set to a value greater than the size of the inputted ROB: if the input file <pathandfilename> is written in the first or third file format described above,
numvec is reset to the size of the inputted ROB; but if the input file <pathandfilename> is written in the second file format described above, AERO-S throws an error
message and interrupts the simulation.
|
- The second command format described below should be used in the case of:
- One or multiple primal, structural, mass- or identity-orthonormalized eigen or other ROBs.
- One of multiple primal, structural, ROBs that are not necessarily orthonormalized.
- One or multiple dual, non-negative ROBs (for example,
non-negative Lagrange multipler bases for constrained nonlinear
analyses).
rob_id1 rob_type1 <pathandfilename1> numvec1 [tolerance1]
.
.
.
rob_idi rob_typei <pathandfilenamei> numveci [tolerancei]
.
.
.
rob_idN rob_typeN <pathandfilenameN> numvecN [toleranceN]
|
rob_idi
| Integer number identifying the i-th inputted (primal or dual) ROB to support its usage in other commands such as DYNAMICS, IDISPLACEMENTS, IVELOCITIES,
and ITEMPERATURES (integer).
|
rob_typei
| Type of the i-th inputted ROB (characters). It can take one of the following values:
eigen: in this case, the inputted ROB must satisfy — within the specified absolute tolerance tolerance — both properties  and and  ,
where and
are the mass and stiffness matrices associated with the finite
element model inputted in this ASCII Input Command Data file, is
the diagonal matrix of the squares of its natural circular frequencies, and ,
where and
are the mass and stiffness matrices associated with the finite
element model inputted in this ASCII Input Command Data file, is
the diagonal matrix of the squares of its natural circular frequencies, and  is the identity matrix. is the identity matrix.
mnorm: in this case, the inputted ROB must satisfy — within the specified absolute tolerance tolerance — the property .
inorm: in this case, the inputted ROB must satisfy — within the specified absolute tolerance tolerance — the property  , or may simply have full column rank
and not satisfy any orthonormality property. , or may simply have full column rank
and not satisfy any orthonormality property.
nnorm: in this case, the inputted ROB does
not have to satisfy any orthogonality property but its columns must be
linearly independent.
noneg: in this case, the inputted ROB must satisfy the property that none of its entries is negative.
|
<pathandfilenamei>
| Name of the i-th
file (including path, if needed) containing a primal or dual ROB to be
read (characters). The type (ASCII/binary) and format of this file
follow the
same rules as those governing the type and format of <pathandfilename> (see above). If the ROB to be read is a primal ROB, this name must have the extension ".massorthonormalized",
unless rob_type_i is set to inorm.
|
numveci
| Specifies the size of the i-th inputted primal or dual ROB (integer). This parameter is governed by the same rules as those governing numvec.
|
tolerancei
| Tolerance to be used by AERO-S to verify that the i-th inputted primal ROB satisfies the mathematical property associated with its type (real).
For example if the ROB is declared to be mass-orthonormalized, AERO-S performs the following verification
 If the ROB is declared to be of the type
If the ROB is declared to be of the type nnorm, AERO-S performs the Singular Value Decomposition (SVD) of and verifies that each of its singular values  satisfies
satisfies
 AERO-S performs this verification if and only if this
parameter is set to a non zero value, and the requested analysis is a
linear structural dynamic analysis using a
ROM constructed with the sub-command
AERO-S performs this verification if and only if this
parameter is set to a non zero value, and the requested analysis is a
linear structural dynamic analysis using a
ROM constructed with the sub-command MODAL or SROM of DYNAMICS. If this parameter is skipped or assigned a zero value, AERO-S
skips
this verification. One good reason for skipping this verification
is if the computational model does not include a mass or stiffness
matrix, as possible in the case of a modal
analysis using a ROB of the type eigen.
|
106 RECONSTRUCTING THE SOLUTION FROM THE REDUCED COORDINATES
The RODC command can be used to perform either or both of the following tasks:
- Reconstruct the high-dimensional solution of a nonlinear dynamic
problem of interest using the computed low-dimensional solution
(generalized coordinates) of the reduced-order version
of this problem, and the Reduced-Order Basis (ROB) provided
through the READMODE command and specified after the
SROM sub-command keyword of the DYNAMICS
command. While
for nonlinear problems this capability is the only means for
reconstructing the high-dimensional solution using computed generalized
coordinates of this solution, it is not currently supported
when the nonlinear dynamic reduced-order model is constructed in a
floating reference frame attached to the center of gravity of the
structural system of interest using the FLOATINGFRAME
command.
- Reconstruct also the first and second time-derivatives of this
high-dimensional solution using the computed first and second
time-derivatives of its low-dimensional counterpart
(generalized coordinates), and the ROB provided through the READMODE command.
The reconstructed high-dimensional solution and its time-derivatives can be outputted in ASCII files using the standard
GDISPLAC, GVELOCIT, and GACCELER result keywords of the OUTPUT and/or OUTPUT6 commands.
Note 1: The proper execution of this command requires the presence in the same ASCII Input Command Data file of the DYNAMICS command
and its SROM sub-command keyword because this is where the ROB is specified.
Note 2: AERO-S determines the type of data — that is, displacement, velocity, or acceleration — contained
in an ASCII input file specified using the sub-command keyword CONFIL
from the order in which this file is
specified. Specifically, the displacement generalized
coordinates file should always be inputted first, followed by the
associated velocity and acceleration generalized coordinates
files, in this order.
Note 3: Inputting the velocity and acceleration generalized coordinates is optional. However, if the corresponding files are
specified through additional entries of CONFIL, freq should be the same for all instances of this
sub-command keyword.
Note 4: This command can be executed in parallel by partitioning the mesh associated with the underlying finite element model
of interest using the DECOMPOSE command — or the corresponding command line to request mesh partitioning or provide
aeros a previously computed mesh partition (see DECOMPOSE).
The input format of this command is given below.
CONFIL | <pathandfilenameS> | freq
| CONFIL | <pathandfilenameV> | freq
| CONFIL | <pathandfilenameA> | freq
|
|
CONFIL
| Sub-command keyword for specifying the name of the ASCII file containing the low-dimensional solution
(generalized coordinates) of a nonlinear, reduced-order problem constructed by the projection of its high-dimensional
counterpart on a ROB. Typically, this file is outputted in a previous AERO-S simulation using the result
keyword GDISPLAC of OUTPUT or OUTPUT6.
|
<pathandfilenameS>
| Path and name of the ASCII file containing the low-dimensional solution (generalized coordinates) of a nonlinear,
reduced-order problem constructed by projecting its high-dimensional counterpart of interest on a ROB (characters).
Typically, this file is outputted in a previous AERO-S simulation using the result keyword GDISPLAC
of OUTPUT or OUTPUT6.
|
freq
| Frequency at which the reconstruct the dynamic solution (integer). Its default value is 1.
|
<pathandfilenameV>
| Path and name of the ASCII file containing the first time-derivative of the low-dimensional solution (generalized
coordinates) of a nonlinear, reduced-order problem constructed by projecting its high-dimensional counterpart of interest
on a ROB (characters). Typically, this file is outputted in a previous AERO-S simulation using the result
keyword GVELOCIT of OUTPUT or OUTPUT6.
|
<pathandfilenameA>
| Path and name of the ASCII file containing the second time-derivative of the low-dimensional solution (generalized
coordinates) of a nonlinear, reduced-order problem constructed by projecting its high-dimensional counterpart of interest
on a ROB (characters). Typically, this file is outputted in a previous AERO-S simulation using the result
keyword GACCELER of OUTPUT or OUTPUT6.
|
107 RENUMBERING
|
Command Statement: RENUMBERING
|
The RENUMBERING command statement is used to specify the
type of node renumbering to be performed on the mesh for either or both of the
skyline and sparse solvers. The input format is given below.
TYPE
| For FEM, the “rcm” and “sloan” schemes are available for the skyline solvers,
and the “esmond” (minimal degree ordering) and “metis” (recursive spectral bisection ordering)
are available for the (esmond) sparse solver. When a FETI solver is used, two renumbering schemes
can be specified if a skyline as well as a sparse solver are to be used by this FETI solver. In this
case, the two renumbering schemes can be specified in any order, each on a separate line (string).
|
108 RESTART
|
Command Statement: RESTART
|
The RESTART command is used to request saving computational data in a RESTART file
in order to enable later the restart of a dynamics simulation, and/or initializing a dynamics computation
using computational results previously saved in a RESTART file (restart data).
The processes of creating and reading from a RESTART file are specified on separate lines using
different syntaxes.
Note 1: In addition to the time-instances implied by the specified value of the parameter INCREMENT,
the restart data is also saved at the of a simulation if AERO-S exits gracefully.
The syntax for invoking this command is given below.
PATHANDFILENAME1 INCREMENT
<PATHANDFILENAME2> EXTENSION [FLAG_RST]
|
INCREMENT
| An integer number that specifies at every how many time-integration
steps the “rcfem.restart” file will be updated. For an updating restart, this
number specifies at every how many iterations the file “restart.upd” will be updated.
|
PATHANDFILENAME1 INCREMENT
| This command, which can be combined with the following one,
instructs AERO-S to save/overwrite the restart data into
the specified file PATHANDFILENAME1 (string) every INCREMENT (integer) time-steps.
An example using RESTART can be found in FEM.d/fem_examples/Restart.d/
|
PATHANDFILENAME2 EXTENSION
| This command, which can be combined with the previous one, instructs AERO-S to read
the restart data from the specified file PATHANDFILENAME2 (string) and append the extension
EXTENSION (string) (e.g. “.2”) to all output filenames specified under the command
OUTPUT. An example using RESTART can be found in FEM.d/fem_examples/Restart.d/
|
FLAG_RST
| This optional parameter can
be used to specify whether a hot or cold restart is to be performed
(characters). A hot restart (which is the default type)
is activated by setting FLAG_RST to "old" (case-sensitive and must include the quotation marks): it specifies that the restart is to continue a previously
performed simulation. A cold restart is activated by setting FLAG_RST
to "new" (case-sensitive and must include the quotation marks): it
specifies that the restart
is to perform a new simulation using as initial condition the
state stored in the restart file created by a previous simulation. Cold
restart of AERO-S is
required when performing a coupled fluid-structure simulation using the tandem AERO-F-AERO-S and AERO-F is also restarting in
cold mode – that is, not continuing a previous simulation – (for example, if AERO-F is starting an unsteady flow simulation in which the initial condition is
specified to be the outcome of a previous steady-state flow computation).
|
109 RIGID BODY (AND OTHER ZERO ENERGY) MODES
The TRBM command is used to specify a tolerance for monitoring small pivots during the factorization
of a matrix. “Small” pivots are deemed to be zero pivots. Therefore, they are
associated with rigid body modes (or zero energy modes in general). When this command is specified in
the AERO-S input file and the sparse, skyline, blockskyline, or mumps pivot solver is specified under the STATICS command,
the generalized inverse of the stiffness, conductivity, mass (when an initial acceleration is to be computed to satisfy
the governing equation (see DYNAMICS)), or other relevant matrix is computed in factored form by eliminating the
equation associated with a deemed zero pivot and setting the corresponding unknown to zero.
This command can be used together with the GRBM command (see below).
Note 1: See GRBM for an alternative option for analyzing singular systems.
Note 2: This command can be used together with the GRBM command. If both of the GRBM and TRBM commands
are specified in the same AERO-S input file, then:
- If the equation solver specified in STATICS is the
sparse or skyline solver, and the analysis
to be performed is a linear static, quasistatic, or eigen (structural) analysis, then GRBM is used to:
- Determine the rigid body — or more generally, the zero energy — modes of the prevailing stiffness matrix that
are due to a lack of sufficient Dirichlet boundary conditions or LMPCs to guarantee the invertibility of this matrix.
- Assist the direct equation solvers
sparse and skyline (see STATICS) in solving the admissible system
of linear equations governed by this singular matrix. For an EIGEN analysis, this assistance is performed however only
when the shift is zero.
Therefore the TRBM command is ignored in this case.
- Otherwise:
- GRBM is used to determine, for the purpose of information and only for this purpose, the rigid body — or
more generally, the zero energy — modes of the prevailing stiffness matrix that are due to a lack of sufficient Dirichlet
boundary conditions or LMPCs to guarantee the invertibility of this matrix.
TRBM is used to assist the direct equation solver specified in STATICS in solving the admissible system of
linear equations governed by this singular matrix.
VALUE
| Tolerance for monitoring
the zero pivots of a matrix during its factorization. The default value
is 1.0e-16 except for the MUMPS solver
for which the default is  , where is the machine precision (real). , where is the machine precision (real).
|
110 RIGID BODY MODES FILTER
Command Statement: RBMFILTER [LEVEL] [QMATRIX] [TOLERANCE]
|
This command is suitable for structural, aeroelastic, and aerothermoelastic simulations involving an
unrestrained (or partially restrained) structural system, when any of the following reasons applies:
- The context is that of a linear static or quasistatic analysis, and the total external load is not self-equilibrated.
- The context is that of a dynamic analysis, and it is desired to
artificially eliminate some or all of the rigid body modes of the
system.
In either context outlined above, if this command is specified in the ASCII Input Command Data file, AERO-S automatically determines
the rigid body modes of the modeled system using the GRBM method, constructs a projector  ,
where is the identity matrix,
,
where is the identity matrix,  is a specified symmetric positive definite matrix (see below), and is the matrix storing the computed rigid
body modes, and uses this projector as described below.
is a specified symmetric positive definite matrix (see below), and is the matrix storing the computed rigid
body modes, and uses this projector as described below.
- In a linear static or quasistatic analysis, AERO-S:
- Sets
 (in this case, is symmetric and therefore
(in this case, is symmetric and therefore  ) or
) or  (in this case
(in this case  ), where is the mass matrix,
according to the user's request (see below). In the latter case, if is singular,
), where is the mass matrix,
according to the user's request (see below). In the latter case, if is singular,  will be singular: in this case, AERO-S computes a
generalized inverse of this matrix and therefore requires that the user specifies an absolute tolerance (
will be singular: in this case, AERO-S computes a
generalized inverse of this matrix and therefore requires that the user specifies an absolute tolerance (TOLERANCE) for detecting zero pivots during the factorization of this matrix.
- Applies
 to the total external load to self-equilibrate it (even if this
load happens to be already self-equilibrated) so that the singular
system of equations governing the linear structural analysis problem is
solvable.
For aeroelastic and aerothermoelastic simulations involving an
unrestrained (or partially restrained) structural system, this step is
applied
at each iteration. It corresponds to an artificial trimming of the system that is required for ensuring the solvability of each linear system
of equations that arises.
to the total external load to self-equilibrate it (even if this
load happens to be already self-equilibrated) so that the singular
system of equations governing the linear structural analysis problem is
solvable.
For aeroelastic and aerothermoelastic simulations involving an
unrestrained (or partially restrained) structural system, this step is
applied
at each iteration. It corresponds to an artificial trimming of the system that is required for ensuring the solvability of each linear system
of equations that arises.
In this case, AERO-S computes a particular displacement
solution that satisfies the self-equilibrated equations and
is associated with a minimally restrained configuration of the system of
interest that depends on the equation solver specified in STATICS
(in principle, any equation solver equipped for handling singular
systems introduces in this case the minimum number of non-unique
artificial restraints
that removes all singularities of the system associated with rigid body
modes). Furthermore, this particular solution depends on the choice of
the projector — and therefore on the choice of . In other words, it depends on the selected artificial trimming method implied by
the application of the projector to the total external load.
- In a linear or nonlinear dynamic analysis, AERO-S:
- Sets , where is the mass matrix. In this case, . If due to modeling assumptions is singular, will be singular: in this case, AERO-S computes a
generalized inverse of this matrix and therefore requires that the user specifies an absolute tolerance (
TOLERANCE) for detecting zero pivots during the factorization of this matrix.
- Applies to the initial solution (initial displacement and velocity fields) to filter out a specified subset of the rigid body modes stored in .
- Applies, at each time-step, to the (time-dependent) total external load to filter out the specified subset of the rigid body modes stored in from the governing equations of
dynamic equilibrium — that is, to compute a dynamic solution that is -orthogonal to the specified subset of columns of .
In this case, at each time-step, AERO-S filters out the specified subset of the rigid body modes from the solution it computes
before it outputs it. In the case of a dynamic aeroelastic or aerothermoelastic analysis,
it performs this filtering before it exchanges the solution it computes with the flow solver AERO-S.
Such a filtering amounts to an artificial self-equilibration (or
trimming
in the case of an aeroelatic or aerothermoelastic analysis) of the
system in the translational and rotational axes represented by the
filtered rigid body modes.
An example using this command can be found in APPENDIX 7.
Note 1: This command is not active when a modal dynamic analysis is performed (see DYNAMICS). The reason is that one can
achieve the same objective by simply not including the rigid body modes in the input for the READMODE command. It is also
inactive in an EIGEN or IMPEDANCE analysis as there is no motivation for it in both cases.
The input format of this command is given below.
RBMFILTER [LEVEL] [QMATRIX]
LISRBM id1 id2 id3 id4 id5 id6
|
LEVEL
| Omitting the specification of this integer is equivalent to specifying the value of 1.
|
| 1
| This is the default value. In this case, AERO-S uses the projector as described above.
|
| 2
| This value is applicable only for linear quasistatic and dynamic analyses. In this case, AERO-S
also applies the projector at each iteration or time-step to the computed displacement and velocity fields in order
to explicitly -orthogonalize them against the specified subset of rigid body modes. This is a safety measure that can be useful,
for example, when ill-conditioning prevents the default case from functioning properly.
|
QMATRIX
| This integer information is relevant for a linear static or quasistatic analysis only. It allows the user to choose between
two different settings for the matrix . Omitting this information is equivalent to choosing the value of 0.
|
| 0
| This is the default value. In this case, is set to the mass matrix.
|
| 1
| In this case, is set to the identity matrix.
|
TOLERANCE
| Optional tolerance for the case where QMATRIX is set to 0 (mass matrix ) (real). This tolerance is used by AERO-S to identify
zero pivots during the factorization of the matrix , when is singular due to modeling assumptions. Its default value is 0 (which means that by default,
AERO-S assumes that is invertible).
|
LISRBM
| Sub-command keyword to specify a list of rigid body modes to be filtered out (characters). It is relevant only
in the case of a dynamic analysis. The list consists of integers ranging between 1 and the number of rigid body modes
computed by the GRBM method and stored in , each identifying a rigid body mode by its column number in the matrix .
To this effect, the reader is reminded that stores first the translational rigid body modes in the , and directions,
then the rotational ones in the , , and directions. The integer identifiers can be listed in any order. A specified identifier that is
greater than is simply ignored.
|
id1 (... id6)
| ID number ranging between 1 and the number of rigid body modes computed by the GRBM method and stored in the matrix
of rigid body modes . This integer identifies the column number of where a rigid body mode to be filtered out from the
computed solution is stored: if it is greater than , it is ignored.
|
111 RUBBER DAMPING PROPERTIES TABLE
|
Command Statement: RUBDAFT
|
The command RUBDAFT should be used to describe the variations of Young's modulus , its loss factor ,
the shear modulus , and its loss factor with the frequency (see the sub-command keyword RUBDAMP
in MATERIAL) anytime anyone of these four parameters is frequency dependent. These evolutions can be specified here in one
or multiple tables defined for one or multiple materials by quintuplets of , , , , and .
In each table, linear interpolation is used for the "in between" points, and constant extrapolation (using the parameter
values at the closest frequency) is adopted for the "outside" points. When multiple tables are defined, they are inputted one
after the other, and each is identified by an id number as described below.
TABLE
| Sub-command keyword (characters) for defining a table describing the variation of Young's modulus ,
its loss factor , the shear modulus , and its loss factor
with the frequency in the form of quintuplets  . .
|
table_id
| Id number for the defined table (integer).
|
|
| A sampled frequency value (real).
|

| Value of Young's modulus at the frequency (real).
|

| Value of Young's modulus loss factor at the frequency (real).
|

| Value of the shear modulus at the frequency (real).
|

| Value of the shear modulus loss factor at the frequency (real).
|
112 SAVING EIGENMODES OR PROJECTING ONTO A BASIS
The MODE command can be used to signal that:
- When the EIGEN command is used, the eigen solutions are to be saved in a binary file named EIGENMODES (or binary files EIGENMODES# when using AERO-S
in distributed memory mode with one file per MPI process) and located in the execution path of AERO-S.
- When the DYNAMICS command is used, the
computation of the projections of the transient solution onto a modal or
other basis can be requested in the OUTPUT
command. In this case,
this basis can be inputted either in the binary file named EIGENMODES
(in which case it is a modal basis), or in an ASCII or binary file
inputted via READMODE. Specifically, AERO-S determines
which basis to read and use for this purpose as follows:
- If the
rob_id parameter of this command is omitted, the chosen basis is the modal basis inputted in the file named EIGENMODES.
- If
rob_id is specified to a non-zero value, the command READMODE must be also specified in the ASCII Input Command Data file using its second format.
In this case, the chosen basis is that identified in READMODE using the same value for rob_id.
- If
rob_id is specified as 0, the command READMODE must be also specified in the ASCII Input Command Data file using its first format. In this case,
the chosen basis is that inputted via READMODE.
- When IMPEDANCE is used with
FREQSWEEP, PADEPOLES and alg = PadeLanczos, the binary file named EIGENMODES
(or binary files EIGENMODES# when using AERO-S in distributed memory mode with one file per MPI process) located in the execution
path of AERO-S is to be read, and the eigen modes stored in this (or these) file(s) are to be exploited to identify within a range of interest
the eigenvalues missed by a previous eigen computation and their corresponding eigenvectors.
Note 1: Currently, the use of this command for the second purpose
identified above is supported only for linear dynamic analyses, and in
the absence of a mesh decomposition.
Note 2: The EIGENMODES file is written using the “internal” numbering of AERO-S
for the degrees of freedom. This internal numbering depends on the equation solver and renumbering
scheme that were specified under the STATICS and RENUMBERING commands, respectively, when the eigen
solutions were computed. Hence, when reusing the EIGENMODES file for computing the projections of
the transient solution of a problem onto the vectors contained in this file, the same equation solver
and renumbering scheme must be specified under the STATICS and RENUMBERING commands, respectively.
rob_id
| Integer number identifying the basis inputted via READMODE (integer). See above for a detailed description of the use of this parameter.
|
113 SENSITIVITY ANALYSIS (SENSITIVITY completely spelled out)
|
Command Statement: SENSITIVITY
|
The SENSITIVITY command statement is used to request the formulation and solution of a structural or aeroelastic sensitivity analysis problem.
It can also be used to request that AERO-S participates in the gradient-based solution of a structural or aeroelastic optimization problem by providing
the needed sensitivities.
THGRLI int1 int2 ... intN
READSE pathandfilename
TOLSEN tolsen
|
THGRLI |
|
int1 int2 ... intN
| Sequence of integers inputted on the same line with blank spaces in between that specifies the list of element GROUPS whose thicknesses are to be declared
as sensitivity parameters.
|
READSE
| This subcommand is relevant only when performing a sensitivity analysis with respect to shape variables.
|
pathandfilename
| Name of the ASCII file containing shape sensitivities to be read (characters). Specifically, this file contains
 , the derivatives of the structural mesh position , the derivatives of the structural mesh position  with respect to a number of shape design variables with respect to a number of shape design variables
 . The file starts with an XPost-like header (see below), followed by the total number of nodes
in the structural model. Then, the information . The file starts with an XPost-like header (see below), followed by the total number of nodes
in the structural model. Then, the information  is specified in this file
for each shape design parameter , one parameter at a time, in block form. First, the index of is
specified on a separate line starting from is specified in this file
for each shape design parameter , one parameter at a time, in block form. First, the index of is
specified on a separate line starting from  (zero). Then, all nodes of the finite element model are considered in the same
ordering as that adopted in the command NODES. On each line corresponding to node , the derivatives (zero). Then, all nodes of the finite element model are considered in the same
ordering as that adopted in the command NODES. On each line corresponding to node , the derivatives
 , ,  , and , and  (where (where  , ,  , and , and  denote
the coordinates of the node ) are provided. An example of this ASCII file is given below. denote
the coordinates of the node ) are provided. An example of this ASCII file is given below.
Vector <file name> under load for StructureNodes
<vector size = total number of nodes in the finite element structural model>
0^M
. . .
. . .
. . .
dx_i/ds_0 dy_i/ds_0 dz_i/ds_0
. . .
. . .
. . .
1
. . .
. . .
. . .
dx_i/ds_1 dy_i/ds_1 dz_i/ds_1
. . .
. . .
. . .
2
. . .
. . .
. . .
dx_i/ds_2 dy_i/ds_2 dz_i/ds_2
. . .
. . .
. . .
|
TOLSEN |
|
tolsen
| Convergence tolerance used only when the SENSITIVITY command is used to request that AERO-S participates in the gradient-based solution of an aeroelastic optimization problem.
The default value is 1.0e-5.
|
114 SENSORS *S*
|
Command Statement: SENSORS
|
The SENSORS command statement is used to specify to AERO-S the degrees of
freedom to be observed and whose structural state is to be passed to the user
defined control subroutine “control.C” (see ACTUATORS).
An example input file using the SENSORS command can be found in
FEM.d/fem_examples/Control.d
Note 1: All degrees of freedom referred to by this command are
defined in the nodal degree of freedom reference frames defined at the
nodes
where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal degree of freedom reference frames are the same
as the global reference frame.
NODE#
| Node number where the sensor is to be placed (integer).
|
DOF#
| Degree of freedom local number where the sensor is to be placed (integer).
|
115 SLOSHING PROBLEMS
The command SLOSH is used to specify the computation of the sloshing modes of an incompressible and inviscid
fluid whose free surface is orthogonal to a specified gravity field. The computational approach assumes linear kinematics and
is based on a fluid displacement potential. In three dimensions, it does not involve any fluid material property.
In two dimensions, it requires inputting the thickness of the considered slice of the problem. In both cases,
the SLOSH analysis associated with this command requires identifying a free surface using free-surface elements
(element type 312 in three dimensions and element type 302 in two dimensions, see TOPOLOGY) but does not require any
other boundary condition.
Hence, this command should be used in conjunction with the commands EIGEN and STATICS in order to solve
the arising eigenvalue problem.
slgrav
| Magnitude (scalar) of the gravitational acceleration whose direction must be orthogonal to the free surface of
the problem. AERO-S uses this specified value to convert the sloshing eigenvalues to sloshing frequencies
(number of cycles per second) for output (real).
|
116 SLOSHING ZERO ENERGY MODE
This command is effective only for a sloshing eigen computation involving a zero energy mode.
It is used to request the computation of the constant potential mode using a physics-based algorithm
(rather than the tolerance-based algorithm associated with the TRBM command).
It should be used in conjunction with the SLOSH and related commands.
117 SOURCE TIME TABLE-HEAT CONDUCTION
Command Statement: HFTT[TABLE_ID]
|
The HFTT command statement must be used to specify the time-dependent amplification of the boundary fluxes.
For FEM, pairs of time and amplification values are input. Linear interpolation is also used for “in between” points.
TIME_1 AMP_1
. .
. .
. .
TIME_n AMP_n
|
TABLE_ID
| Optional non-negative integer
which uniquely identifies a source-time table so that it can be
associated with a "load" set to define the "load" case for a dynamic
analysis using
the LOADCASE command. The default value is 0. Hence, the HFTT command can be repeated as many times as desired within the same input file using
each time a different value for TABLE_ID and different data.
|
TIME_1
| A specified time point (float).
|
AMP_1
| A specified amplification value at time point TIME_1
(float). This amplification factor is automatically set to zero for all
times prior to the earliest specified time point and all times later
than the latest specified time point.
|
118 SPECIFIC HEAT COEFFICIENT-TEMPERATURE TABLE
The SCTT command can be used to describe, for a
given material, the evolution of the specific heat coefficient with
temperature. This evolution can be
specified here in a curve (or one-dimensional table) defined by pairs of
specific heat coefficient and temperature values. Linear interpolation
is used for "in between" points,
and the extrema values are adopted for "outside" points. Several curves
can be specified, one after the other. Each curve is identified by an
ID number as described below.
Note 1: Currently, this command is supported only by the 4-noded tetrahedral termal element (type 50).
CURVE | curve_id
| T_1 | cp_1
| | . |
| | . |
| | . |
| T_n | cp_n
|
|
CURVE
| Sub-command keyword (characters)
that signals the definition of a specific heat coefficient-temperature
curve (or one-dimensional table).
|
curve_id
| ID number for the following curve (or one-dimensional table) (integer).
|
T_i
| A specified temperature value (real).
|
YM_i
| A specified specific heat coefficient value at temperature T_i (real).
|
119 STATICS
|
Command Statement: STATICS
|
The STATICS command statement can be used mainly for three independent purposes: (a) select a static analysis, (b) and/or select an
equation solver needed for a static analysis or any other type of analysis specified in an additional command such as DYNAMICS, EIGEN,
or other,
(c) and/or set parameters that are relevant to many other analyses
besides static analysis, such as, for example, a load case among those
defined in the command LOADCASE.
For linear static analysis, this command can also be used for requesting the interpretation of concentrated follower (see FORCES) and pressure-induced (see PRESSURE and CONWEP)
forces and moments as configuration-dependent external forces and
moments and applying to them a piecewise constant treatment, thereby
leading to a quasi-static analysis.
The input format of this command is given below.
Note 1: Except when otherwise specified, the solvers proposed below are available only for symmetrical systems of equations.
Note 2: Among all solvers proposed below, the following ones are suitable for the solution of singular (but consistent) systems: skyline, blockskyline,
sparse, mumps pivot, superlu, and FETI DP. Among these solvers, only sparse, skyline, mumps pivot, and FETI DP compute and return for further usage
the null space of the singular matrix. Furthermore, only the sparse and skyline solvers can benefit for this purpose from the assistance of the GRBM command: all other aforementioned solvers
benefit from the assistance of the TRBM command.
Note that singular systems arise: (1) if the problem is formulated
without
sufficient Dirichlet boundary conditions, or (2) the formulated problem
contains redundant constraints and the Lagrange multiplier method is
chosen for enforcing these constraints (see CONSTRAINTS).
Note 3: Among all solvers proposed below, the following ones are suitable for the solution of indefinite systems: spooles and mumps with pivoting turned on,
superlu, gmres, and FETI DP. Indefinite systems arise if: (1) the analysis involves the HELMHOLTZ, IMPEDANCE, or EIGEN command with a positive shift
(see SHIFT in EIGEN)
or for buckling analysis (see ARPACK in EIGEN), or (2) the structural model includes rigid and/or joint elements (see TOPOLOGY), linear multi-point constraints (see LMPC), or tied surfaces (see TIEDSURFACES),
and the Lagrange multiplier method is chosen for enforcing the associated equality constraints (see CONSTRAINTS) in a static, eigen, or implicit dynamic computation.
Note 4: Among all solvers proposed below, only FETI DP
is suitable for the solution of static or implicit dynamic contact
problems if the Lagrange multiplier method is chosen for enforcing the
associated inequality
constraints.
Note 5: Among all FETI methods, only FETI DP is maintained for nonlinear structural static and dynamic analyses.
Note 6: When a non deterministic analysis is performed using the intrusive version of the Polynomial Chaos method,
only the pcg, bcg, and cr solvers can be selected for solving the resulting large system of equations.
Note 7: In all aforementioned cases, the following direct solvers
can be executed in parallel on a shared memory system using OpenMP, in
the context of a single domain, that of a coarse
solver for a FETI-type method, or that of multiple subdomains (see DECOMPOSE):
spooles | Can be executed in parallel on a shared memory system using OpenMP, in both contexts of a
single domain and a coarse solver for a FETI-type method.
|
skyline | Can be executed in parallel on a shared memory system using OpenMP, in both contexts of a single domain and a coarse
solver for a FETI-type method.
|
blockskyline | Can be executed in parallel on a shared memory system using OpenMP, in both contexts of a single domain and a
coarse solver for a FETI-type method.
|
Note 8: In all aforementioned cases, the following direct solvers
can be executed in parallel on a distributed memory system using MPI,
in the context of a single domain, that of a coarse solver
for a FETI-type method, or that of multiple subdomains (see DECOMPOSE):
mumps | Can be executed in parallel on a distributed system using MPI, in all contexts of a single domain, a coarse solver for
a FETI-type method, and multiple subdomains.
|
Note 9: In all aforementioned cases, the following iterative solvers can be executed in parallel on a distributed memory system
using MPI or MPI and OpenMP, or on a shared memory system using OpenMP, in the context of multiple subdomains (see DECOMPOSE):
| All FETI-type solvers | Can
be executed in parallel on a shared memory system using OpenMP, a
distributed
memory system using MPI, and a hybrid system using OpenMP on its shared
memory subsystem and MPI across its subsystems. In the case
of a distributed or hybrid memory system, and except when mumps is chosen as the coarse problem solver, the coarse problem is
duplicated on each MPI process: for this reason, if mumps
is not chosen as the coarse problem solver, a single MPI process
should be created in general within each computational node in order to
minimize the memory penalty associated with this parallel
implementation of a FETI-type solver. In the specific case of a hybrid
system, if mumps is not chosen as the coarse problem
solver, the coarse problem is solved in parallel using the OpenMP threads forked within an MPI process: for this reason, if
mumps is not chosen as the coarse problem solver, the
maximum speedup factor that can be expected from the parallel solution
of the coarse problem is in this case equal to the number of OpenMP
threads forked within each MPI process, and a single MPI process
should be created within each computational node in order to be able to
assign all computational units within this node to the
effective parallel solution of the coarse problem. On the other hand, if mumps
is chosen as the coarse problem solver,
whether the computations are performed on a parallel distributed or
hybrid memory system, the coarse problem is solved using
all MPI processes without storage duplication. However, by default, the
coarse problem is stored on a single MPI process, which is
memory inefficient: to distribute this problem across all MPI processes,
the user should set ICNTL(18) = 3 (see mumps_icntl below).
|
Note 10: The solvers eisgal and dbsgal can be used only for reduced-order models (ROMs). AERO-S
detects such models by the presence of the READMODE command in its ASCII Input Command Data file.
METHOD | | | |
| PARAMETERS | | | |
| PIECEWISE | real_1 | real_2
| CASES | case_id_1 | case_id_2 | ... | case_id_n
|
|
METHOD | Keyword (characters) specifying one of the solvers named below.
|
solverhandle solver_id
| For any of the equation solvers listed below, if configured in the command SOLVERCNTL using for SOLVER_ID the same integer specified here in solver_id — that is, if this solver and
its parameters and identification are specified in SOLVERCNTL (characters, integer). Note that while any of the equation solvers listed below can be configured in SOLVERCNTL, a multi-level FETI-DP solver must
be configured in SOLVERCNTL and specified here as a solverhandle solver_id.
|
direct
| For a skyline direct solver (characters). This is also the default solver (except when the INPC
command is used) and is available for frequency-domain acoustic (Helmholtz) problems.
|
skyline
| For a skyline direct
solver (characters). This is also the default solver and is available
for frequency-domain acoustic (Helmholtz) problems.a
|
blockskyline
| For a skyline symmetric positive direct solver with loop unrolling for optimal performance (characters).
|
sparse
| For Esmond's sparse direct solver (characters). This solver is also available for
frequency-domain acoustic (Helmholtz) problems.
|
sgisparse (completely spelled out)
| For SGI's sparse direct solver (characters). Runs only on SGI machines.
|
spooles (completely spelled out)
| For the SPOOLES sparse
symmetric positive definite direct solver (characters). Cannot be used
for: (a) a singular system, and (b) a system with less than 24 equations
and unknowns.
|
spooles pivot (completely spelled out)
| For the SPOOLES sparse general symmetric direct solver with the pivoting option turned on (characters).
|
mumps (completely spelled out)
| For the MUMPS sparse
symmetric positive definite or semi-definite direct solver (characters).
This equation solver is not supported by the data organization of BINARY.
|
mumps pivot (completely spelled out)
| For the MUMPS sparse
general symmetric direct solver with the pivoting option turned on
(characters). This equation solver is not supported by the data
organization of BINARY.
|
mumps unsymmetric (completely spelled out)
| For the MUMPS unsymmetric sparse direct solver (characters). This equation solver is not supported by the data organization of BINARY.
|
superlu (completely spelled out)
| For the SUPERLU unsymmetric sparse direct solver (characters).
|
sgisky (completely spelled out)
| For SGI's skyline direct solver (characters). Runs only on SGI machines.
|
frontal (completely spelled out)
| For a frontal direct solver (characters).
|
eisgal
| For EISGAL, the dense, linear equation solver of the Eigen3
library. It is applicable to arbitrary dense
systems of equations arising from a projection-based
Reduced-Order Model (ROM). It is also the default equation solver
for such computational models.
|
dbsgal
| For DBSGAL, the dense, symmetric, linear equation solver of the LAPACK library. It is applicable to
symmetric, dense systems of equations arising from a projection-based Reduced-Order Model (ROM).
|
pcg
| For a preconditioned conjugate gradient solver (characters).
|
bcg
| For a bi-conjugate gradient solver (characters).
|
cr
| For a conjugate residual solver (characters).
|
gmres
| For a generalized minimum residual solver (characters). Applicable to symmetric and unsymmetric systems.
|
FETI
| For a one-level FETI solver (default) (characters).
|
FETI 1
| For a FETI-1 (one-level FETI method) solver (characters).
|
FETI 2 OLD
| For a FETI-2 solver using a “full” coarse problem implementation (characters).
|
FETI 2 NEW
| For a FETI-2 solver using a “sparse” coarse problem implementation (characters).
|
FETI DP
| For a FETI-DP (FETI dual-primal method) solver (characters).
|
FETI DPH
| For a FETI-DPH (FETI dual-primal method with augmentation basis) solver (characters).
This solver is to be used only with the IMPEDANCE command.
Depending on whether the system to be solved is damped or not, or contains a complex boundary condition
or multipoint constraint or not, this solver performs in the real or complex domain.
|
PARAMETERS
| (keywords or keywords and values) for pcg/bcg/cr/gmres solvers, in any order.
|
precno
| Specifies the preconditioner (characters).
|
| 0
| Unpreconditioned (integer). This is the default value.
|
| 1
| Diagonal scaling (integer). This option should not be used when solving an indefinite system arising in conjunction with
the usage of the LMPC or TIEDSURFACES command, or whenever a structural model includes rigid and/or joint elements
(see TOPOLOGY), because in all these cases, the system matrix will contain zero diagonal entries.
|
| 2
| Incomplete block diagonal
scaling (integer). This option is available only for a system of
equations resulting from the
intrusive version of the Polynomial Chaos method. In this
case, the subsystems of equations associated with the diagonal blocks
can be solved either using the sparse solver (default), or the FETI DP method with its acceleration for multiple right sides.
If the FETI DP method is chosen as a block diagonal solver, then its keyword and the keywords associated with its options should be
specified after all other parameters of the main (outer) solver have been specified.
|
tolpcg
| Error tolerance for the convergence of the pcg solver (real). The default value is 1e-8.
|
tolbcg
| Error tolerance for the convergence of the bcg solver (real). The default value is 1e-8.
|
tolcr
| Error tolerance for the convergence of the cr solver (real). The default value is 1e-8.
|
tolgmres
| Error tolerance for the convergence of the gmres solver (real). The default value is 1e-8.
|
maxitr
| Maximum number of iterations to be performed (integer). The default value is 1000.
|
PARAMETERS
| (keywords or keywords and values) for spooles solver, in any order.
|
spooles_renum | Specifies the renumbering (integer, default value is 0).
|
| 0 | Best of nested dissection and multisection.
|
| 1 | Multiple minimum degree.
|
| 2 | Multisection.
|
| 3 | Nested dissection.
|
spooles_scale | Specifies the scaling (integer, default value is 0).
|
| 0 | No scaling.
|
| 1 | Symmetric scaling.
|
spooles_tau
| Upper bound on the magnitude of the largest element in L
or U when pivoting enabled (real  ). If this number is too small the results
will be wrong. The default value of 100 is generally safe if scaling is used (see
spooles_scale). ). If this number is too small the results
will be wrong. The default value of 100 is generally safe if scaling is used (see
spooles_scale).
|
spooles_msglvl
| Message output level (integer  0, default value is 0). 0, default value is 0).
|
spooles_maxdomainsize
| /spooles_maxdomainsize is the maximum subgraph size used by SPOOLES
orderings, where is the number of equations in the system to be solved.
This parameter is used to control the incomplete nested dissection process.
Any subgraph whose weight is less than maxdomainsize is not split further (integer 0, default value is 24).
|
spooles_maxzeros
| *spooles_maxzeros is the maximum number of zeros allowed in a supernode/front (real > 0 and  1.0, default value is 0.04). 1.0, default value is 0.04).
|
spooles_maxsize
| Maximum number of internal columns in supernode/front (integer > 0, default value is 64).
|
PARAMETERS
| Keywords and values for the solver mumps, in any order. Note that:
- When specific values are assigned to the
mumps parameters discussed below under this command (STATICS) – to override their default values –
AERO-S interprets these parameters as those of a global equation solver: hence, AERO-S ignores them if mumps is not specified as the global
equation solver.
- If
mumps is to be used as the
coarse solver of a FETI-type method and specific values are to be
assigned to the parameters discussed below, COARSE_SOLVER (see below)
should be defined as a solverhandle identified by solver_id and the solver mumps and its parameters discussed below should be specified
using SOLVERCNTL (see above).
|
MUMPS_ICNTL index integer_value
| Sub-command keyword and corresponding pair of integers which can be used to set the integer-valued mumps
parameters stored in its ICNTL array, as follows: MUMPS_ICNTL index integer_value (for ICNTL[index] = integer_value,
see the MUMPS
documentation for further details). This keyword and
corresponding pair of integers can be repeated as often as desired
to set different parameters of the array ICNTL. For
example, setting ICNTL[18] = 3 requests that the sparse matrix governing
the system of equations to be solved be distributed across
all MPI processes, while the default setting ICNTL[18] = 0 has
this matrix stored entirely on a single MPI process.
|
MUMPS_CNTL index real_value
| Sub-command keyword and corresponding pair of integer index and real value which can be used to set the real-valued
mumps parameters stored in its CNTL array, as follows: MUMPS_CNTL index integer_value (for CNTL[index] = real_value,
see the MUMPS
documentation for further details). This keyword and
corresponding pair of integer index and real value can be repeated
as often as desired to set different parameters of the
array CNTL.
|
MUMPS_MINEQ integer_value
| This parameter is relevant only when the solver mumps is run in distributed mode. It specifies the minimum number of equations to be allocated to each mumps MPI process
(integer), which itself determines how many of the mumps MPI processes requested within the mpirun command are to be effectively allocated to mumps: this number is equal to the
floor of the ratio of the size of the system of equations to be solved by mumps and integer_value. Hence, this parameter is particularly important for parallel speedup when
mumps is used within a FETI-DP solver.
|
PARAMETERS
| (keywords or keywords and values) for FETI, FETI-DP, FETI-DPH solvers, in any order).
|
spacedim
| This parameter is needed
only for the FETI-DPH method with augmentation. It should be set to 2
for two-dimensional problems, and to 3 for three-dimensional ones
(integer).
|
sparse
| Specifies Esmond's sparse direct method as the local (subdomain and Dirichlet preconditioner)
solver (characters). The default is a skyline solver which can also be invoked by specifying skyline
instead of sparse on this line. Note also that there is another mechanism for specifying
this option (see below).
|
local_solver |
|
solverhandle solver_id
| This choice can represent any of the equation solvers listed below, if configured in the command SOLVERCNTL using for SOLVER_ID the same integer specified here in solver_id — that is, if this
solver and its parameters and identification are specified in SOLVERCNTL (characters, integer).
|
skyline
| Selects the skyline direct method as the local solver (subdomain and Dirichlet preconditioner
problems) (characters). This is also the default choice.
|
sparse
| Selects Esmond's sparse direct method as the local solver (characters).
|
spooles
| Selects the SPOOLES sparse direct method as the local solver (characters).
|
spooles pivot
| Selects the SPOOLES sparse direct method as the local solver with pivoting option turned on (characters).
|
mumps
| Selects the MUMPS sparse direct method as the local solver (characters).
|
mumps pivot
| Selects the MUMPS sparse direct method as the local solver with pivoting option turned on (characters).
|
coarse_solver |
|
solverhandle solver_id
| This choice can represent any of the equation solvers listed below, if configured in the command SOLVERCNTL using for SOLVER_ID the same integer specified here in solver_id — that is, if this
solver and its parameters and identification are specified in SOLVERCNTL (characters, integer). It can also represent any FETI-DP solver, including a multi-level FETI-DP solver.
|
blockskyline
| Selects the block-skyline direct method as the coarse solver. This is also the default choice (characters).
|
skyline
| Selects the skyline direct method as the coarse solver (characters).
|
sparse
| Selects Esmond's (sequential) sparse direct method as the coarse solver (characters).
|
spooles
| Selects the SPOOLES sparse direct method as the coarse solver (characters).
|
spooles pivot
| Selects the SPOOLES sparse direct method as the coarse solver with pivoting option turned on (characters).
|
mumps
| Selects the MUMPS sparse direct method as the coarse solver (characters).
|
mumps pivot
| Selects the MUMPS sparse direct method as the coarse solver with pivoting option turned on (characters).
|
precno
| Specifies the local preconditioner (integer or characters).
|
0 or noprec
| Unpreconditioned (integer). This is the default value.
|
1 or lumped
| Lumped preconditioner (integer).
|
2 or dirichlet
| Dirichlet preconditioner (integer). This is also the default preconditioner.
|
projector |
|
| 1
| Identity based projector (integer). This is also the default projector.
|
| 2
| Preconditioner based projector (integer). Uses the selected preconditioner for building the so-called Q matrix.
|
| 4
| Superlumped projector (integer).
|
scaling |
|
1 or stiffness
| Stiffness based scaling (integer).
|
2 or topology
| Topology (subdomain connectivity) based scaling (integer). This is the default scaling procedure.
|
version |
|
| 1
| The FETI (also known as FETI-1) method (integer).
|
| 2
| The two-level FETI (also known as FETI-2) method (integer).
|
nocoarse
| This option is only for dynamics. When specified, the FETI algorithm is executed without any “coarse grid”.
|
corners
| This keyword is useful only for the FETI-2, FETI-DP, and FETI-DPH methods.
It specifies the treatments of the corners and corner dofs for the construction by these
iterative methods of their respective coarse problems. For the FETI-2 method,
the user can define both the corner and corner dof selection algorithms.
For the FETI-DP and FETI-DPH methods, the corners are automatically chosen by AERO-S but the user can still
control the number of dofs at these corners.
|
cp3
| In that case, a corner is defined by FETI-2 as a crosspoint, and only the three active translational
dof attached at each corner node are included in the construction of the FETI-2 or FETI-DP and FETI-DPH
coarse problems. This is the default value for nodes with 3 dofs. Here, a crosspoint is defined as a
point that belongs to more than four subdomains.
|
cp6
| In that case, a corner is defined by FETI-2 as a crosspoint, and all six active
dof attached at each corner node are included in the construction of the FETI-2 or FETI-DP and FETI-DPH
coarse problems. This is the default value for nodes with 6 dofs. Here, a crosspoint is defined as a
point that belongs to more than two subdomains.
|
be3
| In that case, a corner is defined by FETI-2 as the beginning or end of and edge, and only the
three active translational dof attached at each corner node are included in the construction of the
FETI-2 or FETI-DP and FETI-DPH coarse problems. Note that a crosspoint is also the beginning or end of an edge.
|
be6
| In that case, a corner is defined by FETI-2 either as the beginning or end of and edge, and all
six active dof attached at each corner node are included in the construction of the FETI-2 or
FETI-DP and FETI-DPH coarse problems. Note that a crosspoint is also the beginning or end of an edge.
|
fsi_corners
| This keyword is useful only for the FETI-DPH method when applied to the solution of a fluid-structure interaction
problem (see FSINTERFACE and HWIB) in the frequency domain. It manages the selection of additional,
non_essential corner nodes except for numerical scalability. Note that if the decomposition is performed using DECOMPOSE
and a separate run of AERO-S, the setting of this parameter must be the same when later running
AERO-S using the generated mesh partition to solve a fluid-structure interaction problem using FETI-DPH.
|
0
| In that case, no node of the fluid/structure interface is chosen as a corner node.
|
1
| In that case, every fluid node at the intersection of a subdomain boundary interface and the fluid/structure
interface is chosen as an additional corner node.
|
2
| In that case, every node — whether it is a structure or fluid node — on the intersection of a subdomain boundary
interace and the fluid/structure interface is chosen as an additional corner node.
|
augment
| This keyword is useful only for the FETI-DP and/or FETI-DPH methods.
It specifies the augmentation of the “coarse grid” by various methods defined by the following commands.
|
EdgeGs trans/all
| In that case, the “coarse grid” is augmented using
extra equations generated by the rigid body modes (rbms) of the subdomain interfaces, and organized
edge-by-edge. Here an edge refers to an interface between two subdomains and not to the usual geometric edge.
The “trans/all” option denotes the equation type where “trans” refers to the
translational rbms, and “all” refers to both the translational and rotational
rbms applied per edge.
|
Gs trans/all
| In that case, the “coarse grid” is augmented using extra equations generated by the traces of the
subdomain rigid body modes (rbms) on the subdomain interface boundaries, and organized subdomain-by-subdomain.
The “trans/all” option denotes the equation type where “trans” refers to the translational rbms, and
“all” refers to both the translational and rotational rbms.
|
WeightedEdgeGs trans/all
| In that case, the “coarse grid” is augmented using extra equations generated by the weighted rigid body
modes (rbms) of the subdomain interfaces, and organized edge-by-edge. Here an edge refers to an interface between
two subdomains and not to the usual geometric edge. The “trans/all” option denotes the equation type where
“trans” refers to the translational rbms, and “all” refers to both the translational and rotational rbms
applied per edge. The weights are similar to those used for scaling the residuals. Hence, they are based on
stiffness considerations if the scaling option is set to stiffness, or on topological considerations
if the scaling option is set to topology.
|
primal
| This choice is relevant for the one-level (standard) FETI-DP method, when either Gs trans/all or WeightedEdgeGs trans/all augmentation option
is selected. It is also required in the context of an -level FETI-DP method, for the FETI-DP solvers applied to levels 1 to  .
In this case, the rigid body modes are used to define primal
unknowns on the "coarse grid" problems instead of additional
constraints.
.
In this case, the rigid body modes are used to define primal
unknowns on the "coarse grid" problems instead of additional
constraints.
|
EdgeWs [type] numdir
| This option is exclusive to the FETI-DPH solver and can be combined with the option EdgeGs.
It augments the corner-based coarse problem of the FETI-DPH algorithm with extra equations generated by the free-space
solutions of the frequency-domain acoustic or elastodynamic (or modelled dynamic shell) equation — these are real cosine
and sine waves of arbitrary directions — and organized edge-by-edge. Here an edge refers to an interface between two
subdomains and not to the usual geometric edge. There are as many free-space solutions to be considered
as there are wave directions to be considered. Setting the optional parameter type to solid, shell, fluid, or any,
depending on the type of the elements used in the mesh delivers the best
performance. If the mesh contains several types of elements, the option
any is recommended (default value).
The parameter numdir specifies the
number of desired directions and therefore controls the total number of such wavy augmentation modes (integer).
Its default value is 0. The exact number of augmentation modes per interface edge is equal to numdir for
two- and three-dimensional frequency-domain acoustic problems,  numdir for two-dimensional elastodynamic (or modelled dynamic shell) problems,
and  numdir
for three-dimensional elastodynamic (or modelled dynamic shell)
problems.
In the latter case, the factor 6 comes from the fact
that for each direction, there are 2 shear waves and 1 pressure wave,
and each of these three waves has a cosine mode as well
as a sine mode. The implemented directions are chosen according to the
following scheme. In two dimensions, a sector is discretized into n sectors, with n an even integer. A direction is defined by connecting the
center of the circle to a point on the circle delimiting a sector. Since both the cosine and sine modes are included,
only one direction for each pair of opposite directions needs be retained, which results in a total of
n/2 directions. Hence, n is chosen to be 2*numdir.
In three dimensions, a cube is discretized into  points. A direction is defined by connecting
the center of the cube to a point lying on a face of the cube. Since both the cosine and sine modes are included, only
one direction for each pair of opposite directions needs be retained, which results in a total of points. A direction is defined by connecting
the center of the cube to a point lying on a face of the cube. Since both the cosine and sine modes are included, only
one direction for each pair of opposite directions needs be retained, which results in a total of
 directions. Hence, n is chosen so that
is as close as possible to directions. Hence, n is chosen so that
is as close as possible to numdir, with
 numdir.
|
interf_solver
| This option is currently available only for the FETI-DP and FETI-DPH solvers. It specifies the Krylov method to be
used with these algorithms for solving the interface problem (characters).
|
cg
| Turns on the CG algorithm as an interface problem solver. This is the default value of interf_solver.
|
cgal
| Turns on Dostal's Augmented Lagrangian CG algorithm with adaptive precision control as an interface problem solver.
|
gmres
| Turns on the GMRES algorithm as an interface problem solver.
|
agmres
| Turns on the GMRES algorithm with a deflation-based accelerator for systems with multiple left and/or right sides (characters).
In this case, a non zero deflation subspace size must also be specified using the sub-command keyword deflation_size: otherwise,
agmres will revert to gmres. Note that
by default, the acceleration of the solution of systems with multiple
left sides (or nearby systems) using this configuration of the
GMRES algorithm is disabled because unless the left side
matrices have some special structure (that is not currently exploited),
it requires a substantial overhead. However, this acceleration
can be enabled using the sub-command keyword mlhs.
|
deflation_size
| Specifies the size of the deflation subspace when AGMRES
is specified as the Krylov-based interface solver for the FETI-DP or
FETI-DPH iterative domain decomposition method (integer).
The default value for this size is 0. Hence, activating the
deflation-based acceleration component of the GMRES solver for systems
with multiple left and/or right sides requires setting
the deflation size to a strictly positive integer value.
|
deflation_type
| Specifies how to construct the deflation subspace of the iterative solver agmres (integer). The default value is 0.
|
0
| Specifies that the deflation
subspace is to be constructed using eigenvectors associated with the
smallest eigenvalues XXX of what?? XXX.
|
1
| Specifies that the deflation
subspace is to be constructed using eigenvectors associated with the
largest eigenvalues XXX of what?? XXX.
|
mlhs
| Specifies whether to turn on or off the deflation-based accelerator for systems with multiple left sides when agmres is specified as the Krylov-based interface solver for the FETI-DP
or FETI-DPH iterative domain decomposition method. The default value is 0.
|
1
| Turns on the deflation-based accelerator.
|
0
| Turns off the deflation-based accelerator.
|
gcr
| Turns on the GCR algorithm as an interface problem solver.
|
orthotol
| This option is currently available
only for the FETI-DPH solver. It specifies the tolerance to be used for
filtering out “small” vectors during the local Gram-Schmidt-like
orthogonalization of the augmentation vectors. The default value is
1.0e-02.
|
mpc_type
| This keyword is useful only for the FETI-DP and FETI-DPH methods. It specifies
the algorithm to be used for handling potential multipoint constraints (MPCs) (characters). The default is
primal when the number of MPCs is less or equal to 1000, and dual otherwise.
|
dual
| In this case, the MPCs are enforced by Lagrange multipliers and are satisfied only at convergence (characters).
|
primal
| In this case, the MPCs are put in the coarse problem and are satisfied at every iteration (characters).
|
mpc_precn
| This keyword is useful only for the FETI-DP and FETI-DPH methods, in the presence of MPCs, and when
mpc\_type is set to dual (characters). The default is tblock when running a single thread process, and full otherwise.
|
full
| In this case, the  matrix, where C denotes the constraint matrix, is treated as a single block
matrix (characters). matrix, where C denotes the constraint matrix, is treated as a single block
matrix (characters).
|
tblock
| In this case, the potential algebraic block-structure of the matrix, is exploited (characters).
|
sblock
| In this case, the subdomain-structure of the matrix, is exploited (characters).
|
mblock
| In this case, the mortar-interface-structure of the matrix, is exploited (characters).
|
diag
| In this case, the matrix is approximated by its diagonal (characters).
|
mpc_scaling |
|
1 or stiffness
| Stiffness based scaling (integer).
|
2 or topology
| Topology (subdomain connectivity) based scaling (integer). This is the default scaling procedure.
|
cct_solver |
|
solverhandle solver_id
| This choice can represent any of the equation solvers listed below, if configured in the command SOLVERCNTL using for SOLVER_ID the same integer specified here in solver_id — that is, if this solver and
its parameters and identification are specified in SOLVERCNTL (characters, integer).
|
skyline
| Selects the skyline direct method as the coarse solver. This is the default choice (characters).
|
sparse
| Selects Esmond's (sequential) sparse direct method as the coarse solver (characters).
|
cct_tol
| Specifies the tolerance to be used for detecting singularities in the solution of the
problems of the FETI-DP and FETI-DPH methods in the presence of MPCs (real). The default is 1.0E-12.
|
kryprec
| This option is only for nonlinear problems. It turns on the Krylov preconditioner enrichment for
the solution of nearby problems in a Newton method (characters).
|
| 1
| Turns on the Krylov preconditioner and gives to the maxorth parameter (see below) the scope of
the entire nonlinear analysis.
|
| 2
| Turns on the Krylov preconditioner and gives to the maxorth parameter (see below) the scope of a
load-step in a nonlinear analysis.
|
global_cor_rbm_tol
| Specifies the tolerance to be used for detecting singularities in the solution of the corner-based coarse
problems of the FETI-DP and FETI-DPH methods (real). The default is 1.0E-6.
|
global_rbm_tol
| Specifies the tolerance to be used for detecting the global rigid body modes when using a FETI method (real).
The default is 1.0E-6.
|
maxorth
| Specifies the maximum total number of reorthogonalization vectors used for accelerating a FETI algorithm and/or
enriching its chosen preconditioner during a simulation (integer). For linear problems or while the tangent operator
of a nonlinear problem is frozen, the acceleration is performed using a multiple right side technique based on
reorthogonalization, but only if interf-solver (see below) is set to CG or GCR. For nonlinear
problems, the acceleration is performed using a multiple left side technique based on the enrichment of the preconditioner,
but only if: (a) interf_solv (see below) is set to CG, and (b) kryprec (see above) is activated. If the
kryprec option is not activated, maxorth is to be understood as the maximum total number of reorthogonalization
vectors per Newton iteration, as these vectors are flushed when the tangent operator is rebuilt. For nonlinear problems
where the tangent operator is periodically frozen, if the kryprec option is used, priority in the accumulation
of vectors is given to enriching the preconditioner. The default value is maxitr (see below). To turn-off this
reorthogonalization option, set maxorth to 1.
|
tolfeti
| Error tolerance for the convergence of the feti solver (real). The default value is 1.0e-06.
|
maxitr
| Maximum number of iterations to be performed (integer). The default value is 1000.
|
PIECEWISE real_1 real_2
| This sub-command keyword (characters) followed by two real numbers is applicable to linear static and dynamic analyses.
It requests the interpretation of concentrated follower (see FORCES), pressure-induced (see PRESSURE
and CONWEP), temperature-induced (see TEMPERATURES and THERMOE), and freeplay-induced (see MATERIAL) forces and moments,
and moments due to gravity (see GRAVITY) and discrete masses (see DIMASS)
as configuration-dependent external forces and moments,
and enables their piecewise constant treatment. In this
treatment, the application of the aforementioned external loading
is divided into steps and is performed at the beginning of each
step using the updated deformed configuration. To this effect, and in
the case of a
static analysis: the first entered real number, real_1, specifies the load fraction increment to apply at each step;
and the second real number, real_2, specifies the
total load factor to apply to all inputted external loads. For example,
consider the input "PIECEWISE 0.25 1.0". The second entry "1.0"
requests keeping all external loads inputted using various
commands of AERO-S unchanged, and the first entry "0.25" requests their application to the system of interest
in 4 steps — that is, the application at each step of 25% only of these external loads. On the other hand, inputting
"PIECEWISE 0.25 2.0" requests multiplying first all external loads resulting from various external load input commands
by the factor 2, then applying at each step a load increment equal to 0.25 times of the original external loads. This
implies splitting the application of the magnified external loads in 8 steps and applying at each step an external load
increment equal to 12.5% of the magnified external load.
For a dynamic analysis, this sub-command is automatically activated for the freeplay-induced (see MATERIAL) forces and moments.
|
CASES
| This optional sub-command keyword (characters) can be used to select a "load" case among those defined in the LOADCASE command.
In this capacity, it is relevant to all analyses. However for linear static analysis and single-frequency frequency response analysis,
it can also be used to select multiple "load" cases among those defined in the LOADCASE command.
Selecting no "load" case is equivalent to selecting the load case 0 which by default
contains the "load" set 0 and any "load" generated by a command which does not support the "load" set construct (LOADSET_ID)
(see the FORCES, PRESSURE, HNEU, FLUX, and/or CONVECTION command).
|
case_id_j
| Non-negative integer identifying uniquely a -th "load" case that is defined in the LOADCASE command. Specifying more than one case identifier on the same line results in a
multiple "load" case analysis.
|
120 STRESS-STRAIN ONE-DIMENSIONAL TABLE
The SS1DT command can be used to describe the
evolution of stress with strain, for a given material. This evolution
can be specified
here via a curve (or one-dimensional table) defined by pairs of strain
and stress values. Linear interpolation is used for "in between" points,
and the extrema values are adopted for "outside" points. Several curves
can be specified, one after the other. Each curve is identified
by an ID number as described below.
CURVE | curve_id
| strain_1 | stress_1
| | . |
| | . |
| | . |
| strain_n | stress_n
|
|
CURVE
| Sub-command keyword (characters) signaling the definition of a stress-strain curve (or table).
|
curve_id
| “Id number” for the following curve (or one-dimensional table) (integer).
|
strain_i
| A specified strain value (real).
|
stress_i
| A specified stress value at strain strain_i (real).
|
121 STRESS-STRAIN TWO-DIMENSIONAL TABLE
The SS2DT command can be used to describe the
evolution of stress with biaxial strain, for a given material. This
evolution can be specified here
in a surface (or two-dimensional table) defined by triplets of two
strain values and and one stress value. Linear interpolation is used for
"in between" points,
and the extrema values are adopted for "outside" points. Several
surfaces can be specified, one after the other. Each surface is
identified by an ID number
as described below.
SURFACE | surface_id | [ENGINEERING | eng_flag]
| | | strain22_1 | ... | strain22_m
| strain11_1 | stress_11 | ... | stress_1m
| | . | . | |
| | . | . | |
| | . | . | |
| strain11_n | stress_n1 | ... | stress_nm
|
|
SURFACE
| Sub-command keyword (characters) signaling the definition of a stress-biaxial-strain surface (or table).
|
surface_id
| “Id number” for the following surface (or two-dimensional table) (integer).
|
ENGINEERING
| Optional sub-command keyword
signaling the input of a flag that specifies the interpretation of the
inputted stress and strain data (characters).
|
eng_flag
| A flag specifying the interpretation of the inputted stress and strain data (characters). The value On indicates that the stress and strain data are to be interpreted as
engineering quantities. The value Off indicates that
the stress and strain data are to be interpreted as the second-Piola
Kirchhoff stress and Green-Lagrange strain, respectively.
The default value is On.
|
strain11_i
| A specified strain11 value (real).
|
strain22_j
| A specified strain22 value (real).
|
stress_ij
| A specified stress value at strains strain11_i and strain22_j (real).
|
122 STRUCTURAL DAMPING LOSS FACTOR TABLE
|
Command Statement: SDETAFT
|
The command SDETAFT can be used to describe for a given material, the variation of the Young modulus loss factor
(see the sub-command keyword STRDAMP in MATERIAL) with the frequency
. This evolution can be specified
here in one or multiple curves (or tables) each defined by pairs of
Young modulus loss factor and frequency values. On each curve,
linear interpolation is used for the "in between" points, and constant
extrapolation (using the loss factor value at the closest
frequency) is adopted for the "outside" points. When multiple curves are
defined, they are inputted one after the other, and each
is identified by an id number as described below.
CURVE
| Sub-command keyword (characters) for defining a curve (or table) describing the variation of the Young modulus
loss factor with the frequency in the form of pairs  . .
|
curve_id
| "Id number" for the defined curve (integer).
|
|
| A sampled frequency value (real).
|
|
| Value of the Young modulus loss factor at the frequency (real).
|
123 SURFACE TOPOLOGY
|
Command Statement: SURFACETOPO
|
The SURFACETOPO command statement can be used to
define a discrete surface on a body by describing its faceted
connectivity. Each facet may, but does not necessarily have
to, be an element defined in the command TOPOLOGY.
Such a surface can be paired with another similar surface using another
command statement in order to define a surface-to-surface
interaction (see TIEDSURFACES, CONTACTSURFACES, FSINTERFACE, AERO). It can also be referred to by another command statement to define a surface boundary condition
(see PRESSURE, FORCES, DISPLACEMENTS, FLUX and TEMPERATURES) or a group of nodes (see GROUPS).
Each surface is inputted using two sections. The first one
identifies the surface to be defined and assigns to it, if needed, a
thickness. This section
is followed by a second section which contains the description of all
faces constituting the surface. Each face is specified on a separate
line.
The set of two sections can be repeated as many times as there are
surfaces to be defined.
The format of this command is as follows.
SURFACETOPO ID_NUMBER SURFACE_THICKNESS t
|
ID_NUMBER
| Surface id number (integer).
|
SURFACE_THICKNESS
| Optional keyword indicating that the surface identified by ID_NUMBER
defines the midplane of a physical surface (string). The importance of
this
parameter is underlined by the following note and consequences.
For contact detection and enforcement, a surface is treated as 2-sided
(or “shell” surface) when both of the following conditions are
met: (a) the simulation is explicit dynamics with flagTDENFORCE set to On in DYNAMICS
(or omitted since this is the default setting),
and (b) a non-zero value is specified here for this surface
thickness parameter. In all other cases, the contact detection and
enforcement is 1-sided.
For a 1-sided surface, the directions of the normals to the faces
of the surface are important. Contact interactions between two 1-sided
surfaces, or self-contact
involving one 1-sided surface, can only be detected between two
faces with normals in opposite directions. Furthermore, if an
interaction is detected,
the directions of the normals establish whether the configuration
involves penetration or separation. For a 2-sided surface, the
directions of the normals of
the faces of the surface are not important. Contact interactions
between two 2-sided surfaces, or self-contact involving one 2-sided
surface, can be detected
between two faces regardless of the directions of the normals. For
contact between one 2-sided surface and one 1-sided surface, only the
normal direction of
the 1-sided surface is important. If an interaction is detected,
the direction of the normal of the 1-sided surface establishes whether
the configuration involves
penetration or separation.
|
t
| Real or virtual thickness of the
surface used for detecting and enforcing contact conditions on both of
its sides (real). The default value is 0.
|
FACE# FACETYPE CONNECTIVITY_NODES
|
FACE#
| Face id number whose type and connectivity are to be specified (integer).
|
FACETYPE |
|
| 1
| 4-node quadrilateral.
|
| 2
| 8-node quadrilateral.
|
| 3
| 3-node triangle.
|
| 4
| 6-node triangle.
|
| 5
| 9-node quadrilateral.
|
| 6
| 12-node quadrilateral.
|
| 7
| 10-node triangle.
|
124 THERMAL EXPANSION TEMPERATURE TABLE
The TETT command statement can be used to describe the evolution
of the coefficient of thermal expansion with temperature, for a given material. This evolution can be
specified here in a curve (or table) defined by pairs of temperature and coefficient of thermal expansion values.
Linear interpolation is used for “in between” points, and the extrema values are adopted
for “outside” points. Several curves can be specified, one after the other. Each curve
is identified by an “id number” as described below.
CURVE | curve_id
| T_1 | TE_1
| | . | .
| | . | .
| | . | .
| T_n | TE_n
|
|
CURVE |
|
curve_id
| “Id number” for the following curve (or table) (integer).
|
T_1
| A specified temperature value (float).
|
TE_1
| A specified coefficient of thermal expansion value at temperature T_1
(float).
|
125 THERMOELASTICITY
|
Command Statement: THERMOE
|
The THERMOE command statement is used to indicate that AERO-S is to
interact with itself to perform a transient thermoelastic (thermostructure-structure vibration)
one-way coupled simulation.
The syntax for invoking this option is given below.
126 TIED SURFACES
|
Command Statement: TIEDSURFACES
|
The TIEDSURFACES command can be used to tie — that is, enforce perfect contact between — pairs of surfaces
defined using the command SURFACETOPO. Surface interactions are detected using the search module of the library ACME.
For explicit computations, the discrete kinematic constraint equations are defined and enforced as specified in the sub-command
keyword TDENFORCE and its associated flag flagTDENFORCE of the DYNAMICS object. For implicit
computations, the discrete kinematic constraint equations are formulated using AERO-S's
mortar method and enforced using the method specified in CONSTRAINTS or in CONSTRAINT_METHOD
below with the following limitation:
in this case, the enforcement method can be only one of the following
three methods: the penalty method, the Lagrange multiplier method, or
the
augmented Lagrange multiplier method.
Note 1: The enforcement of tied surface constraints by the
Lagrange multiplier method in all but explicit dynamic analyses is
supported only by the FETI-DP family of solvers, the GMRES solver,
and the SPOOLES and MUMPS direct sparse solvers with pivoting enabled
(see STATICS).
SURF_PAIR_ID# MASTER SLAVE
|
or, for static, frequency response, eigenvalue, implicit dynamic, and explicit dynamic computations with the flag flagTDENFORCE set to Off (see DYNAMICS)
SURF_PAIR_ID# MASTER SLAVE MORTAR_TYPE NORMAL_TOL TANGENTIAL_TOL CONSTRAINT_METHOD
|
or, for explicit dynamic computations with the flag flagTDENFORCE set to On (see DYNAMICS)
SURF_PAIR_ID# MASTER SLAVE KPART_TYPE NORMAL_TOL TANGENTIAL_TOL NUM_ITER CONVERG_TOL CONSTRAINT_METHOD
|
SURF_PAIR_ID#
| Id number of the surface pair to be described (integer).
|
MASTER
| Identification of the master (mortar method) surface (see SURFACETOPO) (integer).
|
SLAVE
| Identification of the slave (mortar method) surface (see SURFACETOPO) (integer).
|
CONSTRAINT_METHOD
| Method for enforcing the associated constraints (characters). The default method is set in CONSTRAINTS and used whenever this entry is omitted.
|
multipliers
| The Lagrange multiplier method.
|
elimination
| The elimination method (see CONSTRAINTS for changing the default values of its parameters).
|
penalty beta
| The penalty method. The parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
augmented beta
| The augmented Lagrangian method. The parameter beta should be a large positive number, typically of the order of (no default value is provided).
|
MORTAR_TYPE
| Mortar type: 0 = standard, 1 = dual, default value is 0 (integer).
|
NORMAL_TOL
| Normal search tolerance used by ACME to identify interactions, default value is 0.1 (float) (see Figs. 1.2 and 1.3 in
Section 1.3 of ACME's User Reference Manual).
|
TANGENTIAL_TOL
| Tangential search tolerance used by ACME to identify interactions, default value is 0.001 (float) (see Figs. 1.2
and 1.3 in Section 1.3 of ACME's User Reference Manual).
|
KPART_TYPE
| Kinematic partitioning type: 0 = fixed, 1 = automatic, default value is 0 (integer).
|
NUM_ITER
| Maximum number of predictor-corrector iterations to be performed at each time step. The default value is 5 (integer).
|
CONVERG_TOL
| Convergence tolerance of the predictor-corrector iteration loop. The default value is 1.0e-10 (float).
|
127 USER DEFINED FORCES *S*
The main purpose of the USDF command is to specify nodal forces and/or moments of the follower or axial
type for a structural model via a user-defined subroutine. In this case, the user should: (1) write his/her own algorithm
for specifying the nodal forces and/or moments within a subroutine named control.C (see APPENDIX 10), (2) compile
this subroutine and link it using the makefile provided for this command, and (3) use LOAD to activate it.
By default, all user-defined forces and moments are interpreted as being of the axial type — that is, as being
defined in the fixed nodal degree of freedom reference frames (see NODES and NFRAMES).
However, if a node has rotational degrees of freedom, the user can
specify that the forces and/or moments prescribed at this node
are of the follower type — that is, they act in a direction that remains constant in the local frame attached to the node
where they are applied. This local frame coincides with the nodal degree of freedom reference frame
(see NODES and NFRAMES) in the undeformed configuration. In the deformed configuration, the orientation of
this local frame is defined by the rotation of the node to which it is attached. In other words, the specified
nodal force or moment "follows" in this case the rotation of the node to which it is applied.
User-defined nodal forces and/or moments are not assembled neither at the element level nor at the subdomain level.
They can be combined with those specified under the FORCES and GRAVITY commands, but will not be amplified
by the MFTT or HFTT tables. In case of a conflict between this command and the FORCES and GRAVITY
commands, the specified nodal forces are simply added.
A more detailed description of the control.C subroutine is given in the form of a template in APPENDIX 10.
Note 1: By default, the nodal degree of freedom reference frames are the same as the global reference frame.
Note 2: All forces must be specified in the computational basis.
Note 3: The USDF command is redundant with the ACTUATORS command in the sense that ACTUATORS
can achieve whatever USDF can achieve. However, the reverse is not true.
Note 4: Similarly, this command can be used to prescribe time-variant, Neumann boundary conditions (or source terms)
for a time-domain acoustic simulation.
Note 5: Specifying a follower force or moment leads to an unsymmetric tangent "load" stiffness matrix during a NONLINEAR
analysis.
The syntax for invoking this option is given below.
NODE#
| Node number where the force/moment is specified (integer).
|
DOF#
| Degree of freedom local number where the force/moment is specified (integer).
|
TYPE
| For structural models, all user-defined nodal sources (forces and/or moments in the case of a structural model) are
by default of the axial type. However, if this parameter is set to FOLLOWER and the node NODE# has rotational
degrees of freedom, the user-defined source (force or moment in the case of a structural model) at this node and
the degree of freedom DOF# is considered to be of the follower type (characters).
|
128 USER DEFINED PRESCRIBED DISPLACEMENTS *S*
The purpose of the USDD command is to specify
time-variant prescribed displacements for any node
and its associated dofs using a user-defined subroutine.
In this case, the user should: 1) write his/her own algorithm for specifying
the prescribed displacement field within a subroutine named “control.C”,
2) compile this subroutine and link it with AERO-S using the makefile that is provided for this purpose,
and 3) use the LOAD command (see LOAD) to activate it.
An example input file using the USDD command can be found in
FEM.d/fem_examples/USDD.d/.
This command can be used simultaneously with the time-invariant command DISPLACEMENTS for prescribing displacements at a node. In the event
of a conflict between the DISPLACEMENTS and USDD commands, USDD prevails.
A more detailed description of the “control.C” subroutine is given in its template located in the Control.d directory of AERO-S.
The syntax for invoking this option is given below.
Note 1: All degrees of freedom referred to by this command are
defined in the nodal degree of freedom reference frames defined at the
nodes
where these degrees of freedom are attached (see NODES and NFRAMES). By default, the nodal degree of freedom reference frames are the same
as the global reference frame.
Note 2: Similarly, this command can be used to specify
time-variant prescribed Dirichlet boundary conditions for a time-domain
acoustic simulation by setting DOF# to 8 (see below).
NODE#
| Node number where the displacement is specified (integer).
|
DOF#
| Degree of freedom local number where the displacement is specified (integer).
|
129 WEIGHTS
|
Command Statement: WEIGHTS
|
The WEIGHTS command statement can be used to modify some or all of the weights
attributed by default to an element type (see TOPOLOGY).
These weights are exploited by the mesh partitioning algorithm (see DECOMPOSE)
to achieve load balance when generating the subdomains.
Note 1: Variable weights attributed by default to elements with a variable number of nodes
cannot be modified by this command.
The input format of this command is given below.
ELEMENT_TYPE# DESIRED_WEIGHT
|
ELEMENT_TYPE#
| This is the element type id number as in the TOPOLOGY command (integer).
|
DESIRED_WEIGHT
| This is the desired weight to be attributed to this element type (integer).
|
The weight default values are as follows:
M=Mechanic H=Heat C=Coupled Thermoelastic F=Fluid A=Acoustic W = default weight
| 1 | M: 3d truss (bar) with 3 dof/node (W = 1).
|
| 2 | M: 2d 4-node quadrilateral with 2 dof/node (W = 2).
|
| 3 | H: 3d 4-node quadrilateral with 1 dof/node (W = 2).
|
| 4 | M: 2d 3-node triangle with 2 dof/node (W = 2).
|
| 6 | M: 3d Bernoulli beam with 6 dof/node (W = 1).
|
| 7 | M: 3d Timoshenko beam with 6 dof/node (W = 1).
|
| 8 | M: 3d 3-AQR shell with 6 dof/node (W = 3).
|
| 88 | M: 3d 4-node shell with 6 dof/node (splits into 2 elements of type 8) (W = 4).
|
| 9 | H: 3d 2-node line with 1 dof/node (W = 1).
|
| 10 | H: 2d 4-node quadrilateral with 1 dof/node ( W = 2).
|
| 11 | M: 3d 1-node torsional spring with 3 dof/node (W = 1).
|
| 12 | M: 3d 1-node translational spring with 3 dof/node (W = 1).
|
| 15 | M: 3d 3-node triangular AQR shell with 6 dof/node and composite as well as nonlinear material capability (W = 3).
|
| 1515 | M: 3d 4-node quadrilateral AQR shell with 6 dof/node and composite as well as nonlinear material capability (W = 4).
|
| 16 | M: 3d Belytschko-Tsay shell with 6 dof/node (W = 4).
|
| 17 | M: 3d 8-node brick with 3 dof/node (W = 3).
|
| 18 | M: 3d 4-node shear panel with 3 dof/node (W = 1).
|
| 19 | M: 3d 3-node membrane with 6 dof/node (W = 3).
|
| | (only in-plane and drilling stiffnesses) (W = 1).
|
| 20 | M: 3d 3-node composite or orthotropic shell with 6 dof/node (W = 3).
|
| 2020 | M: 3d 4-node composite or orthotropic shell with 6 dof/node (splits into 2 elements of type 20) (W = 4).
|
| 21 | M: 3d translational spring-link with 3 dof/node (W = 1).
|
| 22 | M: 3d torsion spring-link with 3 dof/node (W = 1).
|
| 23 | M: 3d 4-node tetrahedron with 3 dof/node (W = 3).
|
| 24 | M: 3d 6-node pentahedron with 3 dof/node (W = 3).
|
| 25 | M: 3d 10-node tetrahedron with 3 dof/node (W = 4).
|
| 30 | A: 2d 4-node quadrilateral with 1 dof/node (W = 1).
|
| 31 | A: 2d 4-node quadrilateral GLS element with 1 dof/node (W = 1).
|
| 32* | A: 2d 8-node quadrilateral with 1 dof/node (W = 3).
|
| 33* | A: 2d 4-node quad bubblE element with 1 dof/node (W = 1).
|
| 34* | A: 2d 4-node quad two-level bubble element with 1 dof/node (W = 1).
|
| 35 | A: 2d 3-node triangle with 1 dof/node (W = 1).
|
| 36 | A: 2d 3-node triangular GLS element with 1 dof/node (W = 1).
|
| 38* | A: 2d 6-node triangle with 1 dof/node (W = 3).
|
| 40 | A: 3d 4-node tetrahedron with 1 dof/node (W = 2).
|
| 41 | A: 3d 4-node tetrahedral GLS element with 1 dof/node (W = 2).
|
| 42 | A: 3d 10-node tetrahedron with 1 dof/node (W = 3).
|
| 44 | A: 3d 8-node brick GLS element with 1 dof/node (W = 3).
|
| 45* | A: 3d 8-node brick with 1 dof/node (W = 3).
|
| 46 | H: 3d 3-node triangular heat element (W = 2).
|
| 4646 | H: 3d 4-node triangular heat element (splits into 2 elements of type 46) (W = 3).
|
| 47 | H: 3d 2-node line with 1 dof/node for boundary convection (W = 1).
|
| 48 | H: 3d 4-node quadrilateral with 1 dof/node for boundary convection (W = 2).
|
| 49 | H: 3d 3-node triangle with 1 dof/node for boundary convection (W = 2).
|
| 50 | H: 3d 4-node tetrahedron with 1 dof/node (W = 3).
|
| 51 | H: 3d 8-node brick with 1 dof/node (W = 4).
|
| 52* | M: 3d 6-node triangular shell (W = 1).
|
| 53 | H: 2d 3-node triangular heat element (W = 2).
|
| 56 | H: 3d 2-node heat radiation element (W = 1).
|
| 57 | H: 3d 3-node triangular heat radiation element (W = 2).
|
| 58 | H: 3d 4-node quadrilateral heat radiation element (W = 2).
|
| 59 | A: 2d 6-node axisymmetric triangle with 1 dof/node (W = 3).
|
| 60 | A: 2d 4-node axisymmetric quadrilateral with 1 dof/node (W = 2).
|
| 61 | A: 2d 3-node axisymmetric triangle with 1 dof/node (W = 1).
|
| 62 | A: 2d 8-node axisymmetric quadrilateral with 1 dof/node (W = 3).
|
| 65 | M: 3d 2-node rigid truss (bar) (W = 1).
|
| 66 | M: 3d 2-node rigid beam (W = 1).
|
| 67 | M: 3d rigid link (translational and rotational) (W = 1).
|
| 68 | M: 3d rigid translational link (W = 1).
|
| 69 | M: 3d rigid rotational link (W = 1).
|
| 70 | M: 3d rigid plane or solid element with 3 dof/node (3-node to 20-node element) (W = 3).
|
| 71 | M: 3d rigid plane or solid element with 3 dof/node and anywhere from 3 to 20 nodes per element (W = 1).
|
| 72 | M: 3d 20-node brick (W = 4).
|
| 73 | M: 3d 3-node rigid shell (W = 3).
|
| 74 | M: 3d rigid plane or solid element with 6 dof/node (3-node to 32-node element) (W = 1).
|
| 76 | M: 3d 4-node rigid shell (W = 4).
|
| 78 | M: 3d 1-node point-to-line constraint element with 3 dof/node (W = 1).
|
| 79 | M: 3d 1-node point-to-plane constraint element with 3 dof/node (W = 1).
|
| 81 | H: 2d 4-node contact resistance thermal element with 1 dof/node that can be inserted between two thermal elements of type = 10 (W = 2).
|
| 82 | H: 3d 8-node contact resistance thermal element with 1 dof/node that can be inserted between two thermal elements of type = 51 (W = 4).
|
| 83 | H:
3d 6-node contact resistance thermal element with 1 dof/node that can
be inserted between two thermal elements of type = 50 with 4 nodes each (W = 4).
|
| 84 | H:
2d 3-node triangular bulk fluid (thermal) element with 1 dof/node. The
first node appearing in the connectivity list of this element must be
inside the bulk fluid and the other two nodes must be located at the
interface boundary between the bulk fluid and the surrounding material.
The temperature at the first node is by definition the average
temperature of the bulk fluid (W = 2).
|
| 85 | H: 3d 4-node bulk fluid (thermal) tetrahedron with 1 dof/node. The first
node appearing in the connectivity list of this element must be inside the bulk fluid and the other three nodes
must be located at the interface boundary between the bulk fluid and the surrounding material.
The temperature at the first node is by definition the average temperature of the bulk fluid (W = 3).
|
| 86 | H: 3d 5-node pyramidal bulk fluid (thermal) element with 1 dof/node. The first
node appearing in the connectivity list of this element must be inside the bulk fluid and the other four nodes
must be located at the interface boundary between the bulk fluid and the surrounding material.
The temperature at the first node is by definition the average temperature of the bulk fluid (W = 4).
|
| 87 | M: 3d 4-node membrane with 6 dof/node (W = 4).
|
| 90 | A: 3d 6-node wedge with 1 dof/node (W = 3).
|
| 91 | M: 3d 32-node serendipity brick with 3 dof/node (W = 6).
|
| 92 | M: 3d 26-node serendipity wedge with 3 dof/node (W = 5).
|
| 93 | A: 3d 32-node serendipity brick with 1 dof/node (W = 5).
|
| 94 | A: 3d 26-node serendipity wedge with 1 dof/node (W = 4).
|
| 95 | A: 3d 8-node, or 27-node, or 64-node, or 125-node hexahedron with 1 dof/node (W = 3, 4, 5, 6).
|
| 96 | A: 3d 4-node, or 10-node, or 20-node, or 35-node tetrahedron with 1 dof/node (W = 1, 2, 3, 4).
|
| 97 | M: 3d 15-node serendipity wedge with 3 dof/node (W = 4).
|
| 98 | A: 2d 4-node, or 9-node, or 16-node, or 25-node quadrilateral with 1 dof/node (W = 2, 3, 4, 5).
|
| 99 | A: 2d 3-node, or 6-node, or 10-node triangle with 1 dof/node (W = 2, 3, 4).
|
| 100 | M: 2d 4-node, or 9-node, or 16-node, or 25-node quadrilateral with 3 dof/node (W = 2, 3, 4, 5).
|
| 101 | M: 2d 3-node, or 6-node, or 10-node triangule with 3 dof/node (W = 2, 3, 4).
|
| 102 | M: 3d 8-node, or 27-node, or 64-node, or 125-node hexahedron with 3 dof/node (W = 2, 3, 4, 5).
|
| 103 | M: 3d 4-node, or 10-node, or 20-node, or 35-node hexahedron with 3 dof/node (W = 1, 2, 3, 4).
|
| 105 | A: 3d 8-node, or 27-node, or 64-node, or 125-node spectral hexahedron with 1 dof/node (W = 2, 3, 4, 5).
|
| 106 | M: 3d 2-node rigid beam of arbitrary length, including zero length (W = 1).
|
| 108 | A: 2d 4-node, or 9-node, or 16-node, or 25-node spectral quadrilateral with 1 dof/node (W = 2, 3, 4, 5).
|
| 109 | H: 3d 8-node, or 27-node, or 64-node, or 125-node hexahedron with 1 dof/node (W = 2, 3, 4, 5).
|
| 111 | M: 3d fabric truss with 3 dof/node (W = 1).
|
| 118 | M: 3d 2-node planar joint with 6 dof/node (W = 1).
|
| 120 | M: 3d 2-node spherical joint with 3 dof/node (W = 1).
|
| 121 | M: 3d 2-node translational joint with 3 rotational dof/node (W = 1).
|
| 122 | M: 3d 2-node universal joint with 6 dof/node (W = 1).
|
| 123 | M: 3d 2-node revolute joint with 6 dof/node (W = 1).
|
| 124 | M: 3d 2-node cylindrical joint with 6 dof/node (W = 1).
|
| 125 | M: 3d 2-node prismatic joint with 6 dof/node (W = 1).
|
| 126 | M: 3d 2-node joint-with-driver with 6 dof/node (W = 1).
|
| 127 | M: 3d 2-node pin-in-slot joint with 6 dof/node (W = 1).
|
| 128 | M: 3d 4-node plane stress/plane strain quadrilateral with 3 dof/node (W = 1).
|
| 129 | M: 3d 3-node plane stress/plane strain triangle with 3 dof/node (W = 1).
|
| 131 | M: 3d 1-node discrete mass and inertia element with 6 dof/node (W = 1).
|
| 132 | M: 3d 2-node massless rigid beam of non zero length (W = 1).
|
| 133 | M: 3d 2-node massless rigid beam of arbitrary length, including zero length (W = 1).
|
| 134 | M: 3d 2-node prismatic joint-with-driver and 6 dof/node (W = 1).
|
| 150 | M: 3d 4-node rigid tetrahedron with 3 dof/node (W = 3).
|
| 151 | M: 3d 6-node rigid pentahedron with 3 dof/node (W = 4).
|
| 177 | M: 3d 2-node point-to-moving-point constraint element with 3 dof/node (W = 1).
|
| 178 | M: 3d 3-node point-to-moving-line constraint element with 3 dof/node (W = 1).
|
| 179 | M: 3d 4-node point-to-moving-plane constraint element with 3 dof/node (W = 1).
|
| 180 | M: 3d 8-node Q1-P0 hexahedron with 3 dof/node and nonlinear material capability (W = 3).
|
| 181 | M: 3d 20-node Q2-P0 hexahedron with 3 dof/node and nonlinear material capability (W = 4).
|
| 182 | M: 3d 20-node Q2-P1 hexahedron with 3 dof/node and nonlinear material capability (W = 4).
|
| 183 | M: 3d 4-node P1-P0 tetrahedron with 3 dof/node and nonlinear material capability (W = 3).
|
| 200 | M: 3d 2-node uniaxial translational spring with 3 dof/node for linear or nonlinear analyses (W = 1).
|
| 201 | M: 3d 2-node uniaxial translational spring with 6 dof/node for linear or nonlinear analyses (W = 3).
|
| 202 | M: 3d 2-node uniaxial torsional spring with 3 rotational dof/node for linear or nonlinear analyses (W = 3).
|
| 203 | M: 3d 2-node uniaxial tension-only translational spring with 3 dof/node and an optional freeplay model, for linear or nonlinear analyses (W = 1).
|
| 204 | M:
3d 2-node uniaxial tension-only or compression-only translational
spring with 6 dof/node and a freeplay model, for linear or nonlinear
analyses (W = 1).
|
| 205 | M:
3d 2-node uniaxial tension-only or compression-only torsional spring
with 3 rotational dof/node and a freeplay model, for linear or nonlinear
analyses (W = 1).
|
| 220 | M: 3d 2-node spherical joint spring combination with 6 dof/node (W = 1).
|
| 221 | M: 3d 2-node translational joint spring combination element with 6 dof/node (W = 1).
|
| 222 | M: 3d 2-node universal joint spring combination element with 6 dof/node (W = 1).
|
| 223 | M: 3d 2-node revolute joint spring combination element with 6 dof/node (W = 1).
|
| 224 | M: 3d 2-node cylindrical joint spring combination element with 6 dof/node (W = 1).
|
| 225 | M: 3d 2-node prismatic joint spring combination element with 6 dof/node (W = 1).
|
| 226 | M: 3d 2-node revolute joint-with-actuator and 6 dof/node (W = 1).
|
| 227 | M: 3d 2-node pin-in-slot joint spring combination element with 6 dof/node (W = 1).
|
| 234 | M: 3d 2-node prismatic joint-with-actuator and 6 dof/node (W = 1).
|
| 280 | M: 3d 8-node Q1-P0 incompressible hexahedron with 3 dof/node and nonlinear material capability (W = 3).
|
| 301 | F: 2d 4-node sloshing (fluid) quadrilateral with 1 dof/node (W = 1).
|
| 302 | F: 2d 2-node free-surface (fluid) element with 1 dof/node for two-dimensional sloshing computations using element type = 301 (W = 1).
|
| 311 | F: 3d 4-node sloshing (fluid) tetrahedron with 1 dof/node (W = 3).
|
| 312 | F:
3d 3-node free-surface (fluid) triangle with 1 dof/node for
three-dimensional sloshing computations using element type = 311 (W = 2).
|
| 321 | F: 2d 4-node hydroelastic vibration (fluid) quadrilateral with 1 dof/node (W = 2).
|
| 323 | M: 3d 2-node revolute joint spring combination element with 6 dof/node and a freeplay model (W = 1).
|
| 325 | M: 3d 2-node prismatic joint spring combination element with 6 dof/node and a freeplay model (W = 1).
|
| 331 | F: 3d 4-node hydroelastic vibration (fluid) tetrahedron with 1 dof/node (W = 3).
|
| 1100 | A: 2d 4-node Helmholtz DGM element Q-4-1 (W = 1).
|
| 1101 | A: 2d 4-node Helmholtz DGM element Q-8-2 (W = 2).
|
| 1102 | A: 2d 4-node Helmholtz DGM element Q-16-4 (W = 4).
|
| 1103 | A: 2d 4-node Helmholtz DGM element Q-32-8 (W = 8).
|
| 1110 | A: 2d 3-node Helmholtz DGM element T-4-1 (W = 1).
|
| 1111 | A: 2d 3-node Helmholtz DGM element T-8-2 (W = 2).
|
| 1120 | A: 2d 4-node Helmholtz DEM element Q-4-1 (W = 1).
|
| 1121 | A: 2d 4-node Helmholtz DEM element Q-8-2 (W = 2).
|
| 1122 | A: 2d 4-node Helmholtz DEM element Q-16-4 (W = 4).
|
| 1123 | A: 2d 4-node Helmholtz DEM element Q-32-8 (W = 8).
|
| 1130 | A: 2d 3-node Helmholtz DEM element T-4-1 (W = 1).
|
| 1131 | A: 2d 3-node Helmholtz DEM element T-8-2 (W = 2).
|
| 1150 | A: 3d 8-node Helmholtz DGM element H-6-1 (W = 1).
|
| 1151 | A: 3d 8-node Helmholtz DGM element H-26-4 (W = 4).
|
| 1152 | A: 3d 8-node Helmholtz DGM element H-56-8 (W = 8).
|
| 1153 | A: 3d 8-node Helmholtz DGM element H-98-12 (W = 12).
|
| 1160 | A: 2d 3-node Helmholtz DGM element T-6-1 (W = 1).
|
| 1161 | A: 2d 3-node Helmholtz DGM element T-26-4 (W = 4).
|
| 1162 | A: 2d 3-node Helmholtz DGM element T-56-8 (W = 8).
|
| 1170 | A: 3d 8-node Helmholtz DEM element H-6-1 (W = 1).
|
| 1171 | A: 3d 8-node Helmholtz DEM element H-26-4 (W = 4).
|
| 1172 | A: 3d 8-node Helmholtz DEM element H-56-8 (W = 8).
|
| 1173 | A: 3d 8-node Helmholtz DEM element H-98-12 (W = 12).
|
| 1200 | M: 2d 4-node Elastodynamic DGM element Q-4x2-2 (W = 2).
|
| 1201 | M: 2d 4-node Elastodynamic DGM element Q-16x2-8 (W = 8).
|
| 1220 | M: 2d 4-node Elastodynamic DEM element Q-4x2-2 (W = 2).
|
| 1250 | M: 3d 4-node Elastodynamic DGM element H-6x3-3 (W = 3).
|
| 1251 | M: 3d 4-node Elastodynamic DGM element H-26x3-15 (W = 15).
|
| 1252 | M: 3d 4-node Elastodynamic DGM element H-50x3-28 (W = 28).
|
130 YOUNG MODULUS-STRAIN TABLE
The YMST command can be used to describe, for a
given material, the evolution of the Young modulus with strain. This
evolution can be
specified here in a curve (or one-dimensional table) defined by pairs of
Young modulus and strain values. Linear interpolation is used for "in
between" points,
and the extrema values are adopted for "outside" points. Several curves
can be specified, one after the other. Each curve is identified by an
ID number as described below.
CURVE | curve_id
| Strain_1 | YM_1
| | . |
| | . |
| | . |
| Strain_n | YM_n
|
|
CURVE
| Sub-command keyword (characters) that signals the definition of a Young modulus-strain curve (or one-dimensional table).
|
curve_id
| ID number for the following curve (or one-dimensional table) (integer).
|
T_i
| A specified strain value (real).
|
YM_i
| A specified Young modulus value at strain Strain_i (real).
|
131 YOUNGS MODULUS-TEMPERATURE TABLE
The YMTT command statement can be used to describe the evolution
of Young's modulus with temperature, for a given material. This evolution can be
specified here in a curve (or table) defined by pairs of temperature and Young's modulus values.
Linear interpolation is used for “in between” points, and the extrema values are adopted
for “outside” points. Several curves can be specified, one after the other. Each curve
is identified by an “id number” as described below.
CURVE | curve_id
| T_1 | YM_1
| | . |
| | . |
| | . |
| T_n | YM_n
|
|
CURVE |
|
curve_id
| “Id number” for the following curve (or table) (integer).
|
T_1
| A specified temperature value (float).
|
YM_1
| A specified Young's modulus value at temperature T_1 (float).
|
132 YIELD STRESS-EFFECTIVE PLASTIC STRAIN TABLE
The YSST command statement can be used to describe the evolution of the yield stress with
the effective plastic strain, for a given material. This evolution can be specified here in a curve (or table)
defined by pairs of effective plastic strain and yield stress values. Linear interpolation is used for "in between" points,
and linear extrapolation is used for "outside" points (at the "right"). Several curves can be specified, one after the other.
Each curve is identified by an "id number" as described below.
CURVE | curve_id
| EPS_1 | YS_1
| | . |
| | . |
| | . |
| EPS_n | YS_n
|
|
CURVE |
|
curve_id
| "Id number" for the following curve (or table) (integer).
|
EPS_i
| A specified effective plastic strain value (float). The first point of the table should be characterized by EPS_1 = 0.
|
YS_i
| A specified yield stress value at the effective plastic strain EPS_i (float).
|
133 YIELD STRESS SCALING FACTOR-EFFECTIVE PLASTIC STRAIN RATE TABLE
|
Command Statement: YSSFSRT
|
The YSSFSRT command statement can be used to
describe the evolution of the yield stress scaling factor with
the effective plastic strain rate, for a given material. This evolution
can be specified here in a curve (or table)
defined by pairs of effective plastic strain rate and yield stress
scaling factor values. Linear interpolation is used for “in between”
points,
and linear extrapolation is used for “outside” points (at the “right”). Several curves can be specified, one after the other.
Each curve is identified by an “id number” as described below.
CURVE | curve_id
| EPSR_1 | YSSF_1
| | . |
| | . |
| | . |
| EPSR_n | YSSF_n
|
|
CURVE |
|
curve_id
| “Id number” for the following curve (or table) (integer).
|
EPSR_1
| A specified effective plastic strain rate value (float). The first point of the table should be characterized by EPSR_1 = 0 and YSSF_1 = 1.
|
YSSF_1
| A specified yield stress scaling factor value at the effective plastic strain EPSR_1 (float). The first point of the table should be characterized by EPSR_1 = 0 and YSSF_1 = 1.
|
 . It can be omitted, in which case its default value is 0.
. It can be omitted, in which case its default value is 0.
 . It can be omitted, in which case its default value is 0.
. It can be omitted, in which case its default value is 0.
 . It can be omitted, in which case its default value is 0.
. It can be omitted, in which case its default value is 0.
 . It can be omitted, in which case its default value is 0.
. It can be omitted, in which case its default value is 0.
 . It can be omitted, in which case its default value is 0.
. It can be omitted, in which case its default value is 0.
 . It can be omitted, in which case its default value is 0.
. It can be omitted, in which case its default value is 0.



 .
Hence, only the choices satisfying
.
Hence, only the choices satisfying  . The backward Euler implicit method is
obtained for
. The backward Euler implicit method is
obtained for  . The implicit trapezoidal rule is obtained for
. The implicit trapezoidal rule is obtained for  .
.













 .
.
 .
.














 .
.
 as follows
as follows



 is the stiffness coefficient
is the stiffness coefficient  of this spring is a rotation in the case of a rotational spring, and a displacement in the
case of a translational spring.
of this spring is a rotation in the case of a rotational spring, and a displacement in the
case of a translational spring.




























